You might also like
- 747 Longitudinal DynamicsDocument6 pages747 Longitudinal DynamicsKore BenceNo ratings yet
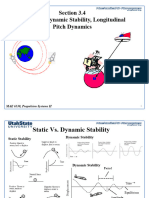
- Section3.4Document78 pagesSection3.4RVMN 13No ratings yet
- A Robust Output-Feedback Control For The Cart-Pole System: A Super-Twisting Sliding-Mode ApproachDocument6 pagesA Robust Output-Feedback Control For The Cart-Pole System: A Super-Twisting Sliding-Mode ApproachSamy Kharuf GutierrezNo ratings yet
- Non-Linear Adaptive Control System For An Underactuated Autonomous Underwater Vehicle Using Dynamic State FeedbackDocument5 pagesNon-Linear Adaptive Control System For An Underactuated Autonomous Underwater Vehicle Using Dynamic State FeedbackSidahmed LarbaouiNo ratings yet
- Pitch Control System Using LQR and Fuzzy Logic Controller: Nurbaiti@tganu - Uitm.edu - My Fuaad@fke - Utm.myDocument6 pagesPitch Control System Using LQR and Fuzzy Logic Controller: Nurbaiti@tganu - Uitm.edu - My Fuaad@fke - Utm.myStefania OliveiraNo ratings yet
- Flutter Analysis at Transonic Speeds Using A Coupled CFD-CSD SolverDocument9 pagesFlutter Analysis at Transonic Speeds Using A Coupled CFD-CSD SolverFurkan KesimNo ratings yet
- Robustness margin computation for attitude control of a quad-rotor mini-rotorcraftDocument10 pagesRobustness margin computation for attitude control of a quad-rotor mini-rotorcraftelguerrero66No ratings yet
- 2837-Article Text-4994-2-10-20220301Document6 pages2837-Article Text-4994-2-10-20220301NouredineAboufarisNo ratings yet
- Aerodynamic Modeling and State-Space Mod PDFDocument5 pagesAerodynamic Modeling and State-Space Mod PDFAli ZunairNo ratings yet
- 06702722njlk;o.njkl;.n.jp;o.jn;o.ljinDocument7 pages06702722njlk;o.njkl;.n.jp;o.jn;o.ljinmugigeneNo ratings yet
- Contribution 2991Document10 pagesContribution 2991FrkanNo ratings yet
- Computational Investigation of A Hull: Keywords: Hull, Naval Architecture, CFD, Marine EngineeringDocument6 pagesComputational Investigation of A Hull: Keywords: Hull, Naval Architecture, CFD, Marine EngineeringVenkat GanapathiNo ratings yet
- Meslouli 2018Document6 pagesMeslouli 2018Mou KhalilNo ratings yet
- An Investigation On The Design and Performance Assessment of Double-PID and LQR Controllers For The Inverted PendulumDocument7 pagesAn Investigation On The Design and Performance Assessment of Double-PID and LQR Controllers For The Inverted Pendulumpremkumarreddy_n4922No ratings yet
- Lec 8Document45 pagesLec 8fuckNo ratings yet
- Traffic characteristics for freeway merging control optimizationDocument20 pagesTraffic characteristics for freeway merging control optimizationUmar SaiduNo ratings yet
- A New Anti Swing Control of Overhead CranesDocument6 pagesA New Anti Swing Control of Overhead CranesEFRAIN ESTEBANNo ratings yet
- Urai 2017 7992893Document6 pagesUrai 2017 7992893Sama AshleighNo ratings yet
- A Self-Tuning Fuzzy Logic Controller For Aircraft Roll Control SystemDocument8 pagesA Self-Tuning Fuzzy Logic Controller For Aircraft Roll Control SystemFlorea Maria BiancaNo ratings yet
- Modelo SewayDocument5 pagesModelo Sewayedmevacu1996No ratings yet
- Theoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatDocument10 pagesTheoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatJuan Santiago Latigo ColliNo ratings yet
- Inprovements in Stores Seperation (Aircraft - Tip Off)Document6 pagesInprovements in Stores Seperation (Aircraft - Tip Off)georgerootNo ratings yet
- The Mathematical Model of The Belt Conveyor PDFDocument8 pagesThe Mathematical Model of The Belt Conveyor PDFDiego FernándezNo ratings yet
- The Use of Computational Fluid Dynamics To Assess The Hull Resistance of Concept Autonomous Underwater VehiclesDocument6 pagesThe Use of Computational Fluid Dynamics To Assess The Hull Resistance of Concept Autonomous Underwater VehiclesManh Dien HuynhNo ratings yet
- Experimental and Theoretical Assessment of Aerodynamic and Stability Derivatives of A Subscale AircraftDocument6 pagesExperimental and Theoretical Assessment of Aerodynamic and Stability Derivatives of A Subscale AircraftIgor Mayer SoaresNo ratings yet
- Nonlinear, Adaptive Control System For Payload Extraction OperationsDocument13 pagesNonlinear, Adaptive Control System For Payload Extraction Operationsabraha gebruNo ratings yet
- Adaptive Sliding Mode Spacecraft Attitude ControlDocument8 pagesAdaptive Sliding Mode Spacecraft Attitude Controlnab05No ratings yet
- Flight Mechanics - Part 2Document29 pagesFlight Mechanics - Part 2Muhamad ShafiqNo ratings yet
- DYNAMICS OF SPM - Rational Methods For Analyzing SPM Systems - OSVSingapore2007-SPMConfigurationsDocument16 pagesDYNAMICS OF SPM - Rational Methods For Analyzing SPM Systems - OSVSingapore2007-SPMConfigurationsjeedanNo ratings yet
- Evolution of Ship's Mathematical Model From Control Point of ViewDocument6 pagesEvolution of Ship's Mathematical Model From Control Point of ViewLan Lê Thị NgọcNo ratings yet
- Two-Equation Eddy-Viscosity Turbulence Model For Computing Drag Force On Axisymmetric Underwater Vehicle Hull FormDocument7 pagesTwo-Equation Eddy-Viscosity Turbulence Model For Computing Drag Force On Axisymmetric Underwater Vehicle Hull FormElyas Nur FridayanaNo ratings yet
- Aeroelastic Modeling and Analysis of The Wing Engine System of A Large AircraftDocument7 pagesAeroelastic Modeling and Analysis of The Wing Engine System of A Large Aircraftarun kumarNo ratings yet
- Automatic Path Planning and Control Design For AutonomousDocument6 pagesAutomatic Path Planning and Control Design For AutonomousNAENWI YAABARINo ratings yet
- Ada319977 PDFDocument53 pagesAda319977 PDFTeFa DiazNo ratings yet
- Design and Implementation of An Unmanned Tail-Sitter: Roman Bapst, Robin Ritz, Lorenz Meier and Marc PollefeysDocument6 pagesDesign and Implementation of An Unmanned Tail-Sitter: Roman Bapst, Robin Ritz, Lorenz Meier and Marc PollefeysIndira FatihaNo ratings yet
- Sliding Mode Control Strategy For A 6 DOF Quadrotor HelicopterDocument7 pagesSliding Mode Control Strategy For A 6 DOF Quadrotor HelicopternaderjsaNo ratings yet
- Design and Optimization of Backstepping Controller For An Underactuated Autonomous Quadrotor Unmanned Aerial VehicleDocument18 pagesDesign and Optimization of Backstepping Controller For An Underactuated Autonomous Quadrotor Unmanned Aerial VehicleSteve DemirelNo ratings yet
- Design of Stable Fuzzy Controllers For An AGVDocument8 pagesDesign of Stable Fuzzy Controllers For An AGVMihai Alexandru OlaruNo ratings yet
- Sliding Mode Control of F-16 Longitudinal DynamicsDocument6 pagesSliding Mode Control of F-16 Longitudinal DynamicsFawaz PartoNo ratings yet
- Labo 1 Control FuenteDocument35 pagesLabo 1 Control FuenteBrent Quispe PalacinNo ratings yet
- Low-Cost Arduino Based Architecture For Simulation and Control of QuadrotorsDocument6 pagesLow-Cost Arduino Based Architecture For Simulation and Control of Quadrotorshw606No ratings yet
- Simulation of Ship Maneuvering Behavior Based On The Modular Mathematical ModelDocument6 pagesSimulation of Ship Maneuvering Behavior Based On The Modular Mathematical Modeltruva_kissNo ratings yet
- A Robust Visual Servo Control Scheme With Prescribed Performance For An Autonomous Underwater VehicleDocument6 pagesA Robust Visual Servo Control Scheme With Prescribed Performance For An Autonomous Underwater VehiclebarabinNo ratings yet
- Variable Ratio Control Strategy For A Rear Wheel Active SteeringDocument13 pagesVariable Ratio Control Strategy For A Rear Wheel Active SteeringBerkay ÇelikNo ratings yet
- AIrcraft Control Laws For Envelope ProtectionDocument10 pagesAIrcraft Control Laws For Envelope Protectionabhi singhNo ratings yet
- Symbolic Pole Assignment of 2dof Conventional Helicopter: Tarõk Veli Mumcu Kutluhan Kürúat ÇandõrDocument5 pagesSymbolic Pole Assignment of 2dof Conventional Helicopter: Tarõk Veli Mumcu Kutluhan Kürúat ÇandõrosdacavNo ratings yet
- On-Line Intelligent Control of Submarine Periscopes: July 2007Document7 pagesOn-Line Intelligent Control of Submarine Periscopes: July 2007Rishabh PandeyNo ratings yet
- Tutorial 1Document1 pageTutorial 1Pranav TejaNo ratings yet
- Observer-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehicleDocument6 pagesObserver-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehiclemailtosshettyNo ratings yet
- Research Article: Accuracy Improvement Capability of Advanced Projectile Based On Course Correction Fuze ConceptDocument10 pagesResearch Article: Accuracy Improvement Capability of Advanced Projectile Based On Course Correction Fuze Conceptali_raza117No ratings yet
- Fuzzy+PID Attitude Control for an OctocopterDocument6 pagesFuzzy+PID Attitude Control for an OctocopterVikNo ratings yet
- Optimal SAS Gains for Aircraft StabilityDocument3 pagesOptimal SAS Gains for Aircraft Stabilityevandame5739No ratings yet
- ICEE2018 Paper 20Document6 pagesICEE2018 Paper 20Halim Tlemçani100% (1)
- Adaptive Fuzzy Control For Underwater Hydraulic MaDocument11 pagesAdaptive Fuzzy Control For Underwater Hydraulic MaRahulNo ratings yet
- A Study On The Modeling of A Hexacopter: December 2015Document9 pagesA Study On The Modeling of A Hexacopter: December 2015nkofodileNo ratings yet
- Chapter 16 - CFD PDFDocument28 pagesChapter 16 - CFD PDFdeepakNo ratings yet
- The Influences of Air Temperature On The Intake Process by Numerical SimulationDocument4 pagesThe Influences of Air Temperature On The Intake Process by Numerical SimulationmaniNo ratings yet
- Time Delay ControlDocument7 pagesTime Delay ControlGeet DeokateNo ratings yet
- Unscheduled Proppeller Feathering: Standar Operational ProceduresDocument2 pagesUnscheduled Proppeller Feathering: Standar Operational ProceduresAlëxândër KošëNo ratings yet
- History GyroscopeDocument2 pagesHistory Gyroscopejpalex1986No ratings yet
- Sabreliner Maintenance ManualDocument14 pagesSabreliner Maintenance ManualAlejandro GuzmanNo ratings yet
- Batumi AB Giant ReportDocument7 pagesBatumi AB Giant ReportSteve RichardsNo ratings yet
- Types of DragDocument3 pagesTypes of DragSwetha SharmaNo ratings yet
- Autodesk Robot Structural Analysis Professional 2011 Spread Footing DesignDocument6 pagesAutodesk Robot Structural Analysis Professional 2011 Spread Footing Design01oscar1977100% (1)
- DCS Joystick ConfigDocument3 pagesDCS Joystick ConfigE111 ChipiNo ratings yet
- Carbon Steel and Alloy Steel FastenersDocument2 pagesCarbon Steel and Alloy Steel FastenersagnisivadasanNo ratings yet
- Significance of aircraft characteristics for airport designDocument17 pagesSignificance of aircraft characteristics for airport designCharan Deep100% (1)
- Manual - 47g-5-5a IpbDocument308 pagesManual - 47g-5-5a IpbIsaac Montenegro100% (1)
- Airbus 320 ElectricalDocument1 pageAirbus 320 ElectricalMohamed YaminNo ratings yet
- Montgomery Squadron - Feb 2006Document8 pagesMontgomery Squadron - Feb 2006CAP Unit NewslettersNo ratings yet
- Agard Ag 280Document228 pagesAgard Ag 280Alex RubanNo ratings yet
- Aerodynamics of AirplanesDocument6 pagesAerodynamics of Airplanesapi-582424881No ratings yet
- A320 Component Location ManualDocument16 pagesA320 Component Location ManualAgustin GuzmanNo ratings yet
- Compressible Flow1Document28 pagesCompressible Flow1hs sNo ratings yet
- World War Ii Fighter: AerodDocument7 pagesWorld War Ii Fighter: AerodPatrick Miceli100% (1)
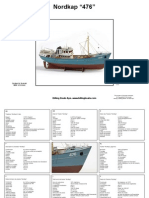
- BB476 Nordkap InstructionDocument19 pagesBB476 Nordkap InstructionMunteanuCNo ratings yet
- M14 PropulsionDocument80 pagesM14 PropulsionArslan Shaukat100% (6)
- Zodiac Ra2009 Uk-Mel PDFDocument106 pagesZodiac Ra2009 Uk-Mel PDFMonica EninNo ratings yet
- United States Navy Supercarrier - Cvn-68 Uss Nimitz: by JdogDocument16 pagesUnited States Navy Supercarrier - Cvn-68 Uss Nimitz: by Jdogaaronsmith812732No ratings yet
- Newton-Euler Dynamic Equations of Motion For A Multi-Body SpacecraftDocument13 pagesNewton-Euler Dynamic Equations of Motion For A Multi-Body SpacecraftDavorinBazijanacNo ratings yet
- Eurocopter As350b3 N-R-D Check CriteriaDocument2 pagesEurocopter As350b3 N-R-D Check Criteria0605330% (1)
- EASA Operations Manual Template for AeroplanesDocument20 pagesEASA Operations Manual Template for Aeroplanestanveer malikNo ratings yet
- Test Services AltitudeDocument2 pagesTest Services Altitudemuhammad faisalNo ratings yet
- Saudi Aramco Inspection Checklist: Welding Overlay Workmanship Assessment SAIC-W-2027 31-Aug-11 MechDocument1 pageSaudi Aramco Inspection Checklist: Welding Overlay Workmanship Assessment SAIC-W-2027 31-Aug-11 MechAnonymous 4e7GNjzGWNo ratings yet
- Distribution of The Phase Angle Between Two Vectors Perturbed by Gaussian NoiseDocument14 pagesDistribution of The Phase Angle Between Two Vectors Perturbed by Gaussian Noisepeppas4643No ratings yet
- AeroShell Grease 7 PDFDocument2 pagesAeroShell Grease 7 PDFAnonymous oAbjbl4HNo ratings yet
- Hydraulic Rock Drill Spec SheetDocument2 pagesHydraulic Rock Drill Spec SheetHerd Iman100% (2)
- Attachment 5 - HSAC RP 2016-1 Helideck Design GuidelinesDocument96 pagesAttachment 5 - HSAC RP 2016-1 Helideck Design GuidelinesMOHAMED0% (1)