You might also like
- Image Formation: - The Two Parts of The Image Formation ProcessDocument9 pagesImage Formation: - The Two Parts of The Image Formation ProcessAaqib IhrazNo ratings yet
- Graphics Systems and Models: TopicsDocument15 pagesGraphics Systems and Models: TopicsElistinNo ratings yet
- Mechatronics: Module - ViDocument53 pagesMechatronics: Module - ViNazeema TTNo ratings yet
- 3D Stereo CameraDocument7 pages3D Stereo CameraCharoensak CharayaphanNo ratings yet
- Dpatra 3D Vision and Geometry NewDocument89 pagesDpatra 3D Vision and Geometry NewRitunjay GuptaNo ratings yet
- Image Processing LECTURE 2-ADocument23 pagesImage Processing LECTURE 2-Akamar044100% (2)
- Computer Graphics Course IntroductionDocument77 pagesComputer Graphics Course IntroductionmuhibNo ratings yet
- ImageDocument14 pagesImageShanjuJossiahNo ratings yet
- CG ch-8 (The Graphic Pipeline)Document22 pagesCG ch-8 (The Graphic Pipeline)Kay KhineNo ratings yet
- 26 StereoDocument39 pages26 StereoxolraxNo ratings yet
- Unit 1 - Part - IDocument48 pagesUnit 1 - Part - IVamsi KrishnaNo ratings yet
- CGADocument8 pagesCGARYZEN OPNo ratings yet
- Structured Light: Matt Waibel COMP 290-075 4-17-2000Document18 pagesStructured Light: Matt Waibel COMP 290-075 4-17-2000Khaled Waly AhlawyNo ratings yet
- Photoframmetry SupplementDocument4 pagesPhotoframmetry SupplementBreeNo ratings yet
- Radiometry of Image Forma0on: Jitendra MalikDocument14 pagesRadiometry of Image Forma0on: Jitendra MalikElisée Ndjabu DHNo ratings yet
- Linear TriangulationDocument41 pagesLinear Triangulationsarbjot singhNo ratings yet
- Image Formation: DD2423 Image Analysis and Computer VisionDocument45 pagesImage Formation: DD2423 Image Analysis and Computer VisionTrọng QuảngNo ratings yet
- Digitalisasi CitraDocument28 pagesDigitalisasi CitraritawidiartiNo ratings yet
- What Is The Goal Stereo Vision?Document7 pagesWhat Is The Goal Stereo Vision?Sentinel BergNo ratings yet
- Fundamentals of Computer GraphicsDocument39 pagesFundamentals of Computer GraphicsAyush SaxenaNo ratings yet
- Computer Graphics Lecture NotesDocument24 pagesComputer Graphics Lecture NotesNicholas kaburuNo ratings yet
- IP FundamentalsDocument41 pagesIP Fundamentalsrohit nNo ratings yet
- Chapter 12 ADocument57 pagesChapter 12 A123456ranoNo ratings yet
- How The Camera " Sees" The Image: A Presentation OnDocument22 pagesHow The Camera " Sees" The Image: A Presentation OnhelpresearchNo ratings yet
- Lecture 1 Fundamentals of Image ProcessingDocument24 pagesLecture 1 Fundamentals of Image Processingsarbjot singhNo ratings yet
- 3D ViewingDocument3 pages3D ViewinganushkaNo ratings yet
- Stereo 3d VisionDocument53 pagesStereo 3d Visionatom tuxNo ratings yet
- CG Unit 1Document22 pagesCG Unit 1VINAYAK CODMNo ratings yet
- CG Assignment-2 With SolutionDocument11 pagesCG Assignment-2 With SolutionSelzer ProfitNo ratings yet
- Recording and Displaying of ImagesDocument33 pagesRecording and Displaying of ImagesAmogha UpadhyayaNo ratings yet
- Vision Project Report PDFDocument21 pagesVision Project Report PDFMuhammad AnsarNo ratings yet
- The Term Computer Graphics Has Several MeaningsDocument90 pagesThe Term Computer Graphics Has Several MeaningsNihilNo ratings yet
- Why Camera Modeling?: Image ProcessingDocument10 pagesWhy Camera Modeling?: Image ProcessingRaju BhaiNo ratings yet
- OpenCV Lections: 7. Working With Camera. Background and Motion AnalysisDocument22 pagesOpenCV Lections: 7. Working With Camera. Background and Motion AnalysisДенис Перевалов100% (3)
- Lecture #2: C Camera ModelDocument38 pagesLecture #2: C Camera ModelElisa PopNo ratings yet
- Unit 5Document28 pagesUnit 5Lakshya KarwaNo ratings yet
- Experiments in 3D Measurements by Using Single Camera and Accurate MotionDocument6 pagesExperiments in 3D Measurements by Using Single Camera and Accurate MotionĐường Khánh SơnNo ratings yet
- Image Processing Fundamentals: Md. Nurul Alam Limon ID: 2182081003Document33 pagesImage Processing Fundamentals: Md. Nurul Alam Limon ID: 2182081003Md. Nurul AlamNo ratings yet
- L9 Rediometry of Image FormationDocument14 pagesL9 Rediometry of Image FormationApple ForScaleNo ratings yet
- Photogrammetry: DTM Extraction & EditingDocument20 pagesPhotogrammetry: DTM Extraction & EditingNovianti MarthenNo ratings yet
- Cathode Ray Tube: IT E3/L - Graphic and Visual ComputingDocument5 pagesCathode Ray Tube: IT E3/L - Graphic and Visual Computingkhristian paul gentoleoNo ratings yet
- Computer Graphics and VisualizationDocument77 pagesComputer Graphics and VisualizationMohan H G SantyNo ratings yet
- Radiometry of Image Formation (Computer Vision)Document14 pagesRadiometry of Image Formation (Computer Vision)Anukriti BansalNo ratings yet
- Unit 1 GraphicsDocument19 pagesUnit 1 Graphicsb7qxnnm8mzNo ratings yet
- Procedural Surface: Exploring Texture Generation and Analysis in Computer VisionFrom EverandProcedural Surface: Exploring Texture Generation and Analysis in Computer VisionNo ratings yet
- 7.3 Softcopy-Based Systems 215: 7.3.2 Stereo EnvironmentDocument6 pages7.3 Softcopy-Based Systems 215: 7.3.2 Stereo Environmenttirto babbaNo ratings yet
- Image Formation Fundamentals: CS308 Data StructuresDocument41 pagesImage Formation Fundamentals: CS308 Data StructuresPushpanjali MishraNo ratings yet
- Digital Image ProcessingDocument10 pagesDigital Image ProcessingAnil KumarNo ratings yet
- Chap 6Document65 pagesChap 6EmanNo ratings yet
- Ch3 Robot Vision, Programming, ApplicationsDocument29 pagesCh3 Robot Vision, Programming, ApplicationsMelkamu SimenehNo ratings yet
- What Is Photogrammetry?: Photos - Light Gramma - To Draw Metron - To MeasureDocument63 pagesWhat Is Photogrammetry?: Photos - Light Gramma - To Draw Metron - To MeasureELADIONo ratings yet
- Updated CG Unit 1Document18 pagesUpdated CG Unit 1Priyadarshini PatilNo ratings yet
- Computer Stereo Vision: Exploring Depth Perception in Computer VisionFrom EverandComputer Stereo Vision: Exploring Depth Perception in Computer VisionNo ratings yet
- Machine Vision3Document23 pagesMachine Vision3diiiiipsNo ratings yet
- CG Unit 1Document21 pagesCG Unit 1mahiNo ratings yet
- Presentation CCDDocument18 pagesPresentation CCDSoif AhmedNo ratings yet
- EEE 6512 Image Processing and Computer VisionDocument43 pagesEEE 6512 Image Processing and Computer VisionArnab DuttaNo ratings yet
- JRNGKRJGDocument52 pagesJRNGKRJGAyush ModiNo ratings yet
- Computer Graphics: - IntroductionDocument18 pagesComputer Graphics: - IntroductiondevilkingssNo ratings yet
- Controlling Light With Freeform Optics: Vladimir OlikerDocument3 pagesControlling Light With Freeform Optics: Vladimir OlikertttNo ratings yet
- Sarvepalli Radhakrishnan, 1888-1975Document10 pagesSarvepalli Radhakrishnan, 1888-1975Raaja RajaNo ratings yet
- RAAJADocument2 pagesRAAJARaaja RajaNo ratings yet
- Light Amplification by Stimulated Emission of Radiation (LASER or Laser) Is A Mechanism For EmittingDocument10 pagesLight Amplification by Stimulated Emission of Radiation (LASER or Laser) Is A Mechanism For EmittingRaaja RajaNo ratings yet
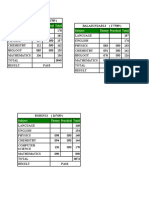
- Subject Theory Practical Total Subject Theory Practical TotalDocument3 pagesSubject Theory Practical Total Subject Theory Practical TotalRaaja RajaNo ratings yet
- Huawei S5720-LI Series Switches BrochureDocument15 pagesHuawei S5720-LI Series Switches BrochureMurillo SilvaNo ratings yet
- Average Power Sensor Uncertainty Calculator Rev8Document4 pagesAverage Power Sensor Uncertainty Calculator Rev8dragelaNo ratings yet
- J111 / J112 / J113 / MMBFJ111 / MMBFJ112 / MMBFJ112 - SB51338 / MMBFJ113 N-Channel SwitchDocument6 pagesJ111 / J112 / J113 / MMBFJ111 / MMBFJ112 / MMBFJ112 - SB51338 / MMBFJ113 N-Channel SwitchMusholihin Sayank NathivaNo ratings yet
- On The Challenges and Opportunities of Smart Meters in Smart Homes and Smart GridsDocument7 pagesOn The Challenges and Opportunities of Smart Meters in Smart Homes and Smart GridsGILBERT DJIDIACK FAYENo ratings yet
- TV Televes 2.satellite Dishes enDocument10 pagesTV Televes 2.satellite Dishes ensdmitarNo ratings yet
- BOM Electrical ComponentsDocument3 pagesBOM Electrical Componentslinkin_slayerNo ratings yet
- Modern Control Systems 8th Edition PDFDocument9 pagesModern Control Systems 8th Edition PDFmohmmad shouqataliNo ratings yet
- Energy - Audit - Draft Report - Bajaber Millers LTD v1 22 11 2017Document73 pagesEnergy - Audit - Draft Report - Bajaber Millers LTD v1 22 11 2017Birimumaso DavidNo ratings yet
- Multimeter - Beckman (1987) PDFDocument1 pageMultimeter - Beckman (1987) PDFfredy8704No ratings yet
- 7SD522 DiffDocument3 pages7SD522 DiffBalajiNo ratings yet
- hk3370/hk3470 Service Manual: Harman/kardon Stereo ReceiverDocument123 pageshk3370/hk3470 Service Manual: Harman/kardon Stereo ReceiverBotelja VinaNo ratings yet
- Parallel Inverter: Power ElectronicsDocument10 pagesParallel Inverter: Power ElectronicsKiran SmathNo ratings yet
- Corium Z211 PIMDocument3 pagesCorium Z211 PIMcndpeNo ratings yet
- Rcms2903-4E1-4Ge Multi-Service Fibermux: Raisecom Technology Co., LTDDocument4 pagesRcms2903-4E1-4Ge Multi-Service Fibermux: Raisecom Technology Co., LTDRaflyext BandungNo ratings yet
- Sensor Signal ConditioningDocument366 pagesSensor Signal Conditioningwagnalang1639100% (1)
- Agrolog EU - Declaration - of - Conformity - 18092019 - E20 - 220909 - 153922Document2 pagesAgrolog EU - Declaration - of - Conformity - 18092019 - E20 - 220909 - 153922kantapon sompanithanNo ratings yet
- UserManual LCCAST600T en v2Document13 pagesUserManual LCCAST600T en v2Kamran ManafzadeNo ratings yet
- Plancha Rowenta Properfect PDFDocument174 pagesPlancha Rowenta Properfect PDFJavier SarriugarteNo ratings yet
- Electronics Minor Project Metro Train PrototypeDocument84 pagesElectronics Minor Project Metro Train PrototypeHemant93% (44)
- Bravo Tech BMB0900 Booster User ManualDocument28 pagesBravo Tech BMB0900 Booster User ManualJW PradanaNo ratings yet
- Supercapacitor PHD ThesisDocument8 pagesSupercapacitor PHD Thesispuzinasymyf3100% (2)
- Professional Summary: DC Generators in RailwaysDocument28 pagesProfessional Summary: DC Generators in RailwaysDharini KrishnanNo ratings yet
- TPC 19. Output Resistance vs. Frequency TPC 22. Input VSWR G +10Document1 pageTPC 19. Output Resistance vs. Frequency TPC 22. Input VSWR G +10mhasansharifiNo ratings yet
- Chapter 8 ProblemsDocument21 pagesChapter 8 Problemskhrid3100% (2)
- E24 Series Heavy Duty Counter Equipments: Hot-Plates / Food Warmer / Griddles / FryersDocument16 pagesE24 Series Heavy Duty Counter Equipments: Hot-Plates / Food Warmer / Griddles / FryersJonathan FajardoNo ratings yet
- Philippine Electrical CodeDocument8 pagesPhilippine Electrical CodeStephen Gomez100% (2)
- Marking Guide Level 5 Multimedia Set Up Sound ReinforcementDocument11 pagesMarking Guide Level 5 Multimedia Set Up Sound ReinforcementJean d'Amour ISHIMO100% (1)
- Digital ClockDocument6 pagesDigital ClockAlex Xander AcayenNo ratings yet
- Physics (Inter) Set 1 10 PDFDocument116 pagesPhysics (Inter) Set 1 10 PDFshivam kumarNo ratings yet