You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Solved Problems To Chapter 02 (Singh)Document7 pagesSolved Problems To Chapter 02 (Singh)Julie Hurley100% (1)
- Thyrotronic Batterycharger/Rectifier: Thyrotronic Series Is The ClassicalDocument3 pagesThyrotronic Batterycharger/Rectifier: Thyrotronic Series Is The Classicalsalle123No ratings yet
- Cross Current CompensationDocument2 pagesCross Current Compensationwagner_guimarães_1No ratings yet
- RectifiersDocument27 pagesRectifiersMeral MeralNo ratings yet
- Eee302 Lab9Document18 pagesEee302 Lab9Meral MeralNo ratings yet
- Average Model of A Three Phase Controlled Rectifier Valid For Continuous and Discontinuous Conduction ModesDocument7 pagesAverage Model of A Three Phase Controlled Rectifier Valid For Continuous and Discontinuous Conduction ModesMeral MeralNo ratings yet
- 3-Phase Pulse Width Modulated (PWM) Inverter: DR - Arkan A.Hussein Power Electronics Fourth ClassDocument10 pages3-Phase Pulse Width Modulated (PWM) Inverter: DR - Arkan A.Hussein Power Electronics Fourth Classmohammed aliNo ratings yet
- Power SuppliesDocument29 pagesPower SuppliesMeral MeralNo ratings yet
- Thyristor Fundamental Characteristics of Thyristors Application Note PDFDocument6 pagesThyristor Fundamental Characteristics of Thyristors Application Note PDFsksarang30% (1)
- Fractional Order Systems-MDPI AG (2019)Document116 pagesFractional Order Systems-MDPI AG (2019)Meral MeralNo ratings yet
- Implementation of High Step-Up Solar Power Optimizer For DC Micro Grid ApplicationDocument5 pagesImplementation of High Step-Up Solar Power Optimizer For DC Micro Grid ApplicationMeral MeralNo ratings yet
- MagneticsTables Con Datos de Núcleos e HilosDocument6 pagesMagneticsTables Con Datos de Núcleos e HilosJavierNo ratings yet
- PFC Small SignalDocument14 pagesPFC Small SignalMeral MeralNo ratings yet
- Lecture 9-Fluid Pressure MeasurementDocument43 pagesLecture 9-Fluid Pressure MeasurementMeral MeralNo ratings yet
- Grid-Forming Power Inverters - Control and Applications-CRC Press (2023) Hassan Haes Alhelou, Nabil Mohammed, Behrooz BahraniDocument307 pagesGrid-Forming Power Inverters - Control and Applications-CRC Press (2023) Hassan Haes Alhelou, Nabil Mohammed, Behrooz BahraniAdinath 02No ratings yet
- Presure MeasurementDocument31 pagesPresure MeasurementMalik MuchamadNo ratings yet
- 10 17694-Bajece 1096188-2343685Document6 pages10 17694-Bajece 1096188-2343685Meral MeralNo ratings yet
- Control of Chaotic Behaviour in Parallel-Connected DC-DCDocument5 pagesControl of Chaotic Behaviour in Parallel-Connected DC-DCMeral MeralNo ratings yet
- (IEEE Press Series On Power and Energy Systems) Paul C. Krause - Reference Frame Theory - Development and Applications-Wiley-IEEE Press (2020)Document177 pages(IEEE Press Series On Power and Energy Systems) Paul C. Krause - Reference Frame Theory - Development and Applications-Wiley-IEEE Press (2020)Meral MeralNo ratings yet
- Experiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierDocument4 pagesExperiment No 1speed Control of DC Motor Single Phase Half Wave Controlled RectifierMohammed Dyhia Ali100% (2)
- 10 17694-Bajece 1096188-2343685Document6 pages10 17694-Bajece 1096188-2343685Meral MeralNo ratings yet
- APpNotes - Temperature Coefficient of Resistance For Current SensingDocument5 pagesAPpNotes - Temperature Coefficient of Resistance For Current SensingMeral MeralNo ratings yet
- Fundamentals of Backstepping ControlDocument10 pagesFundamentals of Backstepping ControlEstácio LimaNo ratings yet
- Converter System Modeling Via MATLAB/SimulinkDocument18 pagesConverter System Modeling Via MATLAB/SimulinkjacarmiNo ratings yet
- Dynamic Analysis of The Switched-Inductor Buck-BoostDocument10 pagesDynamic Analysis of The Switched-Inductor Buck-BoostMeral MeralNo ratings yet
- Dynamic Analysis of The Switched-Inductor Buck-BoostDocument10 pagesDynamic Analysis of The Switched-Inductor Buck-BoostMeral MeralNo ratings yet
- Sim U Link SlidesDocument23 pagesSim U Link SlidesMeral MeralNo ratings yet
- Mariusz - Cichowlas PWM Rectifier Active FilterDocument154 pagesMariusz - Cichowlas PWM Rectifier Active FilterJandfor Tansfg ErrottNo ratings yet
- Euler's Formula and Trigonometry: 1 The Sine and Cosine As Coordinates of The Unit CircleDocument11 pagesEuler's Formula and Trigonometry: 1 The Sine and Cosine As Coordinates of The Unit CircleMeral MeralNo ratings yet
- Control Design of PWM Converters: The User Friendly ApproachDocument145 pagesControl Design of PWM Converters: The User Friendly ApproachMeral MeralNo ratings yet
- Operating and Programming Instructions For The Control Units For Vibratory Drives Type ESR 2000Document16 pagesOperating and Programming Instructions For The Control Units For Vibratory Drives Type ESR 2000Daniel Castro FloresNo ratings yet
- Report VivaDocument66 pagesReport VivaVanditaa SethiNo ratings yet
- HBUC InstallinstructionDocument10 pagesHBUC InstallinstructionLucas YeniddinNo ratings yet
- lm2907 PDFDocument20 pageslm2907 PDFArieNo ratings yet
- 1MRK509007-BEN en Directional Time-Overcurrent Relays and Protection Assemblies Based On Single Phase Elements RXPDK2HDocument22 pages1MRK509007-BEN en Directional Time-Overcurrent Relays and Protection Assemblies Based On Single Phase Elements RXPDK2HAffanFathurNo ratings yet
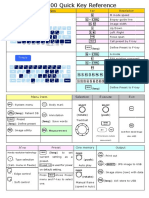
- Honda Hs2100 Quick Key ReferenceDocument2 pagesHonda Hs2100 Quick Key ReferenceLaura ArandaNo ratings yet
- RT430 RT434 GNSS TM EN HWB 8v4Document107 pagesRT430 RT434 GNSS TM EN HWB 8v4Carlos Sulca NeiraNo ratings yet
- Telecom BillingDocument58 pagesTelecom BillingHareesh DevireddyNo ratings yet
- Integrating Type Digital Voltmeter PDFDocument3 pagesIntegrating Type Digital Voltmeter PDFDhamu DharanNo ratings yet
- Accedian Skylight Performance Element GT DatasheetDocument3 pagesAccedian Skylight Performance Element GT DatasheetEnrique RodriguezNo ratings yet
- XPSABV1133C: Product Data SheetDocument4 pagesXPSABV1133C: Product Data Sheetplavi10No ratings yet
- XasDocument29 pagesXasRicardogcNo ratings yet
- Collector Characteristic Curves Collector Characteristic CurvesDocument4 pagesCollector Characteristic Curves Collector Characteristic CurvesSaid AhmedNo ratings yet
- Catalogo NILOX SPORT - 2014 PDFDocument26 pagesCatalogo NILOX SPORT - 2014 PDFmanryNo ratings yet
- Deep Learning Methods For Fingerprint-Based Indoor Positioning: A ReviewDocument29 pagesDeep Learning Methods For Fingerprint-Based Indoor Positioning: A ReviewTrần Duy ThanhNo ratings yet
- Mobile CommunicationsDocument31 pagesMobile Communicationssuid111100% (1)
- Chapter 4Document28 pagesChapter 4Abo Shaker HaboudalNo ratings yet
- Testing Procedure For Earth Leakage RelaysDocument1 pageTesting Procedure For Earth Leakage RelaysSimon Condor67% (3)
- BDL50 La-D704p (Rev 4.0)Document58 pagesBDL50 La-D704p (Rev 4.0)Engelberth SuarezNo ratings yet
- Satellite L670 Detailed Product Specification: GenuineDocument4 pagesSatellite L670 Detailed Product Specification: Genuineደስታ ጌታውNo ratings yet
- Physics DPP SolutionDocument10 pagesPhysics DPP SolutionAyush GuptaNo ratings yet
- Photodiode and Solarcell (31.8.20) & (1.9.20)Document33 pagesPhotodiode and Solarcell (31.8.20) & (1.9.20)girishkumardarisi254100% (1)
- Superheterodyne ReceiverDocument10 pagesSuperheterodyne ReceiverAndhika Kumara DjaffriNo ratings yet
- GT240 PS Us 102Document2 pagesGT240 PS Us 102Oscar Olivari VargasNo ratings yet
- AMD K7 Processor Based AGP: Main BoardDocument69 pagesAMD K7 Processor Based AGP: Main BoardNacho ElGrandeNo ratings yet
- FCS MBX Megablocks Rev3Document6 pagesFCS MBX Megablocks Rev3shareyhouNo ratings yet
- Determining Relay Coil - InductanceDocument1 pageDetermining Relay Coil - InductanceEBENo ratings yet
- Hardware InterfacingDocument65 pagesHardware Interfacingrajan palaNo ratings yet