You might also like
- UntitledDocument4 pagesUntitledndooraeNo ratings yet
- OU Open University SM358 2007 Exam SolutionsDocument23 pagesOU Open University SM358 2007 Exam Solutionssam smithNo ratings yet
- SQL Tuning Made Easier With SQLTXPLAIN PDFDocument28 pagesSQL Tuning Made Easier With SQLTXPLAIN PDFMabu DbaNo ratings yet
- AC I DC ChokeDocument4 pagesAC I DC ChokeNedel LabileNo ratings yet
- D74942GC40 Ag PDFDocument134 pagesD74942GC40 Ag PDFpamukumarNo ratings yet
- Nonlinear Control Systems ExercisesDocument99 pagesNonlinear Control Systems ExercisesRiccardo M.G. Ferrari100% (2)
- Solvability, Controllability, and Observability of Singular SystemsDocument20 pagesSolvability, Controllability, and Observability of Singular SystemsjavbejaranoNo ratings yet
- 02 Maximal Output Admissible Set - Linear Systems With State and Control ConstraintsDocument13 pages02 Maximal Output Admissible Set - Linear Systems With State and Control ConstraintsArash MarashianNo ratings yet
- Mathematical PhysicsDocument24 pagesMathematical PhysicsMichael PearsonNo ratings yet
- Generalized Riccati Equation and Spectral Factorization For Discrete-Time Descriptor SystemDocument4 pagesGeneralized Riccati Equation and Spectral Factorization For Discrete-Time Descriptor SystemsumathyNo ratings yet
- A direct algorithm for pole placement by statederivativeDocument9 pagesA direct algorithm for pole placement by statederivativeMedo AnaNo ratings yet
- Study of The Dynamic Behavior of The Chemostat SystemDocument12 pagesStudy of The Dynamic Behavior of The Chemostat SystemddubokaNo ratings yet
- Exercises in Nonlinear Control SystemsDocument115 pagesExercises in Nonlinear Control SystemsAshk Nori ZadehNo ratings yet
- Acs EndDocument4 pagesAcs EndMalay DharNo ratings yet
- Control Engineering StabilityDocument23 pagesControl Engineering StabilityAhmad Azree OthmanNo ratings yet
- Systematic Design Adaptive Controllers For Feedback Linearizable SystemsDocument13 pagesSystematic Design Adaptive Controllers For Feedback Linearizable SystemssaurabhchandrakerNo ratings yet
- : نشكيس يزاجح دمحم ر يمس دمحم: مسلاا 2 Observer state feedbackDocument7 pages: نشكيس يزاجح دمحم ر يمس دمحم: مسلاا 2 Observer state feedbackmohamed samierNo ratings yet
- Unesco - Eolss Sample Chapters: Digital Control SystemsDocument9 pagesUnesco - Eolss Sample Chapters: Digital Control SystemsShubham SharmaNo ratings yet
- Of Of: RobertDocument9 pagesOf Of: RobertIsabella CarlaNo ratings yet
- Ex - Sloution CompendiumDocument115 pagesEx - Sloution CompendiumAli Jaber Al QattanNo ratings yet
- A Note On The Stability of Large Scale Systems With DelaysDocument3 pagesA Note On The Stability of Large Scale Systems With DelaysShafayat AbrarNo ratings yet
- Model Reference Adaptive Control for Nonminimum Phase Systems Approximates TrackingDocument10 pagesModel Reference Adaptive Control for Nonminimum Phase Systems Approximates Trackingmaca_1226No ratings yet
- Chapter 2Document12 pagesChapter 2ehmyggasNo ratings yet
- Diq1m w8jrhDocument10 pagesDiq1m w8jrhMohsin MuhammadNo ratings yet
- An Lmi Approach For Designing Sliding Mode ObserversDocument6 pagesAn Lmi Approach For Designing Sliding Mode Observerst123medNo ratings yet
- Properties of MIMO LTI SystemsDocument8 pagesProperties of MIMO LTI SystemsTom KigeziNo ratings yet
- From Classical To State-Feedback-Based Controllers: Lecture NotesDocument10 pagesFrom Classical To State-Feedback-Based Controllers: Lecture Notesomarportillo123456No ratings yet
- Kalman DecompositionDocument13 pagesKalman DecompositionOla SkeikNo ratings yet
- Lumped Systems TheoryDocument7 pagesLumped Systems Theorynim1987No ratings yet
- IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 36, NO. I, JULY 1991Document11 pagesIEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 36, NO. I, JULY 1991johanNo ratings yet
- An Axiomatization of The Lattice of Higher Relative Commutants of A SubfactorDocument19 pagesAn Axiomatization of The Lattice of Higher Relative Commutants of A SubfactorHua WangNo ratings yet
- EE554 Chapter 5 State Feedback ControlDocument27 pagesEE554 Chapter 5 State Feedback ControlAbdullah AloglaNo ratings yet
- A V IvanovDocument13 pagesA V IvanovMuriz AdemovićNo ratings yet
- Output Linear Feedback For A Class of Nonlinear Systems Based On The Invariant Ellipsoid MethodDocument6 pagesOutput Linear Feedback For A Class of Nonlinear Systems Based On The Invariant Ellipsoid MethodinfodotzNo ratings yet
- Optimal linear reconstruction of statesDocument49 pagesOptimal linear reconstruction of statesmailmadoNo ratings yet
- Power Systems Using Energy Functions: Modal-Based Stability Analysis ofDocument6 pagesPower Systems Using Energy Functions: Modal-Based Stability Analysis ofAmel ZeriguiNo ratings yet
- State and Output FeedbackDocument30 pagesState and Output FeedbackAhmad ElsheemyNo ratings yet
- Lattice-Theoretical Fixpoint TheoremDocument26 pagesLattice-Theoretical Fixpoint TheoremGreeetttNo ratings yet
- :: نشكيس يزاجح دمحم ريمس دمحم مسلاا 2 Observer state feedbackDocument7 pages:: نشكيس يزاجح دمحم ريمس دمحم مسلاا 2 Observer state feedbackmohamed samierNo ratings yet
- CH 7Document10 pagesCH 7aprilswapnilNo ratings yet
- 2008 - GDM - Physica A 387 (2008) 418-424Document7 pages2008 - GDM - Physica A 387 (2008) 418-424Vagaf1825No ratings yet
- Tutorial 4 Time ResponseDocument8 pagesTutorial 4 Time ResponseTam PhamNo ratings yet
- High-Performance PCG Solvers For Fem Structural AnalysisDocument28 pagesHigh-Performance PCG Solvers For Fem Structural AnalysisAbu HasanNo ratings yet
- The Positive Real Control Problem and The Generalized Algebraic Riccati Equation For Descriptor SystemsDocument18 pagesThe Positive Real Control Problem and The Generalized Algebraic Riccati Equation For Descriptor Systems王和盛No ratings yet
- Optimization Based State Feedback Control Design For Impulse Elimination in Descriptor SystemsDocument5 pagesOptimization Based State Feedback Control Design For Impulse Elimination in Descriptor SystemsAvinash KumarNo ratings yet
- Evans1950 PDFDocument4 pagesEvans1950 PDFRoyer Guerra huamanNo ratings yet
- What Form of Control Function Can Drive A Discontinuous-Mode Boost Converter To Chaos Via Period-Doubling?Document6 pagesWhat Form of Control Function Can Drive A Discontinuous-Mode Boost Converter To Chaos Via Period-Doubling?sprabhuieeeNo ratings yet
- Multicell Convertor - ObservatoriDocument6 pagesMulticell Convertor - ObservatoriAndrei CocorNo ratings yet
- Other ApplicationsDocument78 pagesOther Applications叶远虑No ratings yet
- Engineering Principles in Physiological Systems AssignmentDocument4 pagesEngineering Principles in Physiological Systems AssignmentEileen FuNo ratings yet
- Chap3 StudentDocument52 pagesChap3 StudenthbuddyNo ratings yet
- Controlling Chaos in Nonlinear CircuitsDocument10 pagesControlling Chaos in Nonlinear CircuitsantoniolflacoNo ratings yet
- Nonlinear and Adaptive Control: An Abbreviated Status ReportDocument15 pagesNonlinear and Adaptive Control: An Abbreviated Status ReportOwais KhanNo ratings yet
- ELG4152L5Document18 pagesELG4152L5Sachin YadavNo ratings yet
- Chapter 10 Root LocusDocument63 pagesChapter 10 Root LocusMariam A Sameh ANo ratings yet
- Controlling Unstable Equilibrium Point Theory For Stability Assessment of Two-Time Scale Power System ModelsDocument9 pagesControlling Unstable Equilibrium Point Theory For Stability Assessment of Two-Time Scale Power System ModelsRony AimaNo ratings yet
- State Feedback Controller Design Using MATLABDocument19 pagesState Feedback Controller Design Using MATLABhariNo ratings yet
- A Simplified Stability Criterion for Discrete SystemsDocument8 pagesA Simplified Stability Criterion for Discrete SystemssakuractNo ratings yet
- Conditions For The Existence of Ordered Structure in Binary Alloy SystemsDocument6 pagesConditions For The Existence of Ordered Structure in Binary Alloy Systemsppiaggi6039No ratings yet
- Tutorial SheetsDocument11 pagesTutorial SheetsKAMARAJU SAI VAMSHINo ratings yet
- Variable Structure Systems With Sliding ModesDocument11 pagesVariable Structure Systems With Sliding ModesNguyen Quang VinhNo ratings yet
- C022 ObserverSmoothBoundedInput 5thIEEE MedCCS97 PaphosDocument11 pagesC022 ObserverSmoothBoundedInput 5thIEEE MedCCS97 PaphosCostanzo ManesNo ratings yet
- Stabilization of Nonlinear SystemDocument7 pagesStabilization of Nonlinear SystemSaht Park Ulyshi AhaanNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Kolej Universiti Teknologi Tun Hussien OnnDocument41 pagesKolej Universiti Teknologi Tun Hussien Onn2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Comparison of Pole Placement and Pole Zero Cancellation Fortuning PID ControllerofigitalexcitationcontrolsystemDocument8 pagesComparison of Pole Placement and Pole Zero Cancellation Fortuning PID Controllerofigitalexcitationcontrolsystem2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Speed Control of BLDC Motor Using Fuzzy Logic ControllerDocument8 pagesSpeed Control of BLDC Motor Using Fuzzy Logic Controller2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Speed Control of DC MotorDocument7 pagesSpeed Control of DC MotorAbhinesh Kumar100% (1)
- Fuzzy Pole Placement For Speed Control in D.C. MotorDocument7 pagesFuzzy Pole Placement For Speed Control in D.C. Motor2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Design and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLABDocument9 pagesDesign and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLAB2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Optimal State Space Control DC MotorDocument6 pagesOptimal State Space Control DC MotoraurivalNo ratings yet
- DC Motor Position Control using PID Controller with Friction CompensationDocument7 pagesDC Motor Position Control using PID Controller with Friction CompensationVipul SharmaNo ratings yet
- Electrical - IJEEE - Control of DC Servomotor Using Relay and Pole - Kamal KishoDocument10 pagesElectrical - IJEEE - Control of DC Servomotor Using Relay and Pole - Kamal Kishoiaset123No ratings yet
- ITC 222aDocument46 pagesITC 222asorsa1No ratings yet
- Pre-Paging (Standard & Non-Standard - Customized by Huawei - ) and The Related Configuration in Case of Ms Unreachable or Power OffDocument7 pagesPre-Paging (Standard & Non-Standard - Customized by Huawei - ) and The Related Configuration in Case of Ms Unreachable or Power OffKhắc Tiệp BùiNo ratings yet
- Basic Introduction To The UCCE Servers and ComponentsDocument24 pagesBasic Introduction To The UCCE Servers and ComponentsDaksin SpNo ratings yet
- SPI Protocol For STPM01 - STPM10 Metering DevicesDocument23 pagesSPI Protocol For STPM01 - STPM10 Metering DevicesMontassar Ben Abdallah100% (1)
- SONTU50 Flat Panel DetectorDocument4 pagesSONTU50 Flat Panel Detectorlutfi100% (1)
- SSL3250A: 1. General DescriptionDocument26 pagesSSL3250A: 1. General DescriptionHarish Kumar MNo ratings yet
- NR1602Document2 pagesNR1602kanagarajravi2022No ratings yet
- Fall 2009 Midterm Exam CS 319 Object-Oriented Software EngineeringDocument6 pagesFall 2009 Midterm Exam CS 319 Object-Oriented Software EngineeringAasma waheedNo ratings yet
- Chapter 3 Modern ApplicationsDocument38 pagesChapter 3 Modern ApplicationsRG RAJNo ratings yet
- Installing SolidWorks 2016 On Your PC Jan 2017 (Stand Alone)Document6 pagesInstalling SolidWorks 2016 On Your PC Jan 2017 (Stand Alone)Jignesh ChauhanNo ratings yet
- HP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideDocument130 pagesHP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideMikel RichieNo ratings yet
- ArrayFire Graphics TutorialDocument32 pagesArrayFire Graphics TutorialkishorenayarkNo ratings yet
- Time Table Pre-Placement TrainingDocument3 pagesTime Table Pre-Placement Trainingpraveen.2014dr1001ece.iitism.ac.inNo ratings yet
- Basic VB Dotnet PDFDocument57 pagesBasic VB Dotnet PDFAlfaz MahardhikaNo ratings yet
- 277 - PI AmplifierDocument2 pages277 - PI AmplifieralesysNo ratings yet
- NGEA - M02 - NGEA Hardware - TXTDocument20 pagesNGEA - M02 - NGEA Hardware - TXTGuido Emanuel SteinbachNo ratings yet
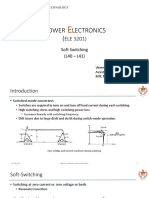
- Ower Lectronics (: Soft Switching (L40 - L41)Document7 pagesOwer Lectronics (: Soft Switching (L40 - L41)Mayank KashyapNo ratings yet
- STURDeCAM31 CUOAGX CXLC AT Release Notes Rev 1 2Document12 pagesSTURDeCAM31 CUOAGX CXLC AT Release Notes Rev 1 2Kumar SSMNo ratings yet
- Linux 64 Bit Huge Pages Document 361468Document5 pagesLinux 64 Bit Huge Pages Document 361468shastry17No ratings yet
- Compressed Sensing System Considerations For ECG and EMG Wireless BiosensorsDocument18 pagesCompressed Sensing System Considerations For ECG and EMG Wireless BiosensorsMuhammad Fauzi D4 ElektromedikNo ratings yet
- Windows Release NoteDocument3 pagesWindows Release NoteLuis GarcíaNo ratings yet
- Catalog - Dahua Network Transmission Products and Solutions - V1.0 - EN - 202004 (32P) PDFDocument32 pagesCatalog - Dahua Network Transmission Products and Solutions - V1.0 - EN - 202004 (32P) PDFHelmy HtssNo ratings yet
- Bigdata 2016 Hands On 2891109Document96 pagesBigdata 2016 Hands On 2891109cesmarscribdNo ratings yet
- Ex:9 To Develop Application To Handle Images and Videos: Nonnull NullableDocument10 pagesEx:9 To Develop Application To Handle Images and Videos: Nonnull NullableSarath SarathkumarNo ratings yet
- Chapter 1 - Introduction To BlitzMaxDocument9 pagesChapter 1 - Introduction To BlitzMaxWilliamMcCollomNo ratings yet
- Baseband 5212 Manual CommissioningDocument31 pagesBaseband 5212 Manual CommissioningNguyễn Văn QHuỳnh100% (1)