You might also like
- SPS J2007003 L202 - Quick Start Guide - Lineage PowerDocument8 pagesSPS J2007003 L202 - Quick Start Guide - Lineage PowerjuanNo ratings yet
- G540 REV8 ManualDocument10 pagesG540 REV8 ManualJoseph Michael MirasoleNo ratings yet
- Pre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationDocument11 pagesPre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationtrebeardNo ratings yet
- 2016 SB03 Troubleshooting 12 V14 TAGECDcircuitDocument10 pages2016 SB03 Troubleshooting 12 V14 TAGECDcircuitAadarsh ReddyNo ratings yet
- Changzhou Wantai Electrical Appliance Co.,LtdDocument10 pagesChangzhou Wantai Electrical Appliance Co.,LtdRaul Giraldo AyalaNo ratings yet
- SI0487Document3 pagesSI0487vanthe140591No ratings yet
- G540 Manual Rev8Document10 pagesG540 Manual Rev8andienNo ratings yet
- Chapter 7 Troubleshooting and Fault InformationDocument3 pagesChapter 7 Troubleshooting and Fault Informationtricky777100% (1)
- Radon Series V4 1 Manual-03052021 EngDocument11 pagesRadon Series V4 1 Manual-03052021 EngAkiba BullNo ratings yet
- Atomos Connect Manual DIGIDocument12 pagesAtomos Connect Manual DIGIRicardo MarquesNo ratings yet
- BPM24RT100BL Specspecifications UpdateDocument8 pagesBPM24RT100BL Specspecifications UpdatemalleNo ratings yet
- Contributors: Toni - K Favorite 7Document13 pagesContributors: Toni - K Favorite 7mgodoy2585No ratings yet
- Stepper Motor Driver Dm860aDocument6 pagesStepper Motor Driver Dm860achomikNo ratings yet
- User'S Manual: JULY, 2015Document12 pagesUser'S Manual: JULY, 2015Mudassar RafiqNo ratings yet
- ICHG 500 Reference GuideDocument7 pagesICHG 500 Reference GuideShree KiranNo ratings yet
- Dq860ma PDFDocument7 pagesDq860ma PDFTrentoNo ratings yet
- Massachusetts Institute of Technology 2.12 Introduction To RoboticsDocument5 pagesMassachusetts Institute of Technology 2.12 Introduction To RoboticsHenry Lois Davila AndradeNo ratings yet
- PowerFlex 700S High Performance AC Drives and 700H Adjustable Frequency AC Drives POWERUPDocument6 pagesPowerFlex 700S High Performance AC Drives and 700H Adjustable Frequency AC Drives POWERUPDoug McMamaraNo ratings yet
- TB6600 User Guide V1.2Document11 pagesTB6600 User Guide V1.2Anonymous gdJiDHNo ratings yet
- TB6500 ManualDocument11 pagesTB6500 ManualEnrique BautistaNo ratings yet
- KA KR Motor Driver ManualDocument33 pagesKA KR Motor Driver Manualalexandr.vl.smk2No ratings yet
- Votol Controler 1Document3 pagesVotol Controler 1Thanh Son NguyenNo ratings yet
- Exp 8 ArduinoDocument6 pagesExp 8 ArduinoMohamed TalebNo ratings yet
- Scale-S 1209Document28 pagesScale-S 1209NajmalNo ratings yet
- 6-06 Starting SystemDocument23 pages6-06 Starting SystemJ.A.G.ANo ratings yet
- DQ542MADocument5 pagesDQ542MADima RedkinNo ratings yet
- Driver Motore Passo PassoDocument12 pagesDriver Motore Passo Passogionp1No ratings yet
- TB6600 User Guide V1.2Document11 pagesTB6600 User Guide V1.2apic20No ratings yet
- Driver Azul PDFDocument24 pagesDriver Azul PDFElectronicaMecatronicsNo ratings yet
- 3HSS2208H-110 High Voltage Digital Stepper Servo Drive ManualDocument24 pages3HSS2208H-110 High Voltage Digital Stepper Servo Drive ManualJose RomeroNo ratings yet
- Keya Monitor Software User Manual PDFDocument14 pagesKeya Monitor Software User Manual PDFAndreyPovoroznyukNo ratings yet
- STEPPERONLINE Brushless DC Motor Driver For Brushless DC Motors BLD-AC750SDocument11 pagesSTEPPERONLINE Brushless DC Motor Driver For Brushless DC Motors BLD-AC750Sm.stepperonlineNo ratings yet
- CNC Interface Board CM101 ManualDocument17 pagesCNC Interface Board CM101 ManualZorica SolunacNo ratings yet
- Variador Yanwa AcerosDocument9 pagesVariador Yanwa Acerosjuan Carlos GonzalezNo ratings yet
- JKBLD750 ManualDocument15 pagesJKBLD750 Manualvicuaduoc1No ratings yet
- Dkg-253 Governor ControllerDocument13 pagesDkg-253 Governor ControllerhanifNo ratings yet
- Checking Item3-8Document12 pagesChecking Item3-8Martinez AndryjNo ratings yet
- Quick Start Guide: 5 To 30HP (16 To 85A) 230V 10 To 75HP (16 To 85A) 460V 15 To 75HP (16 To 85A 575VDocument8 pagesQuick Start Guide: 5 To 30HP (16 To 85A) 230V 10 To 75HP (16 To 85A) 460V 15 To 75HP (16 To 85A 575VAlberto Hern JimNo ratings yet
- bd9275f Datasheet PDFDocument5 pagesbd9275f Datasheet PDFEduardo Amezcua100% (1)
- Troubleshooting For Battery AnalyzerDocument13 pagesTroubleshooting For Battery AnalyzerRizki FebrianNo ratings yet
- DQ860MA EnglishDocument16 pagesDQ860MA Englishnicolascarlao notareNo ratings yet
- Why Fortuner Ups InverterDocument2 pagesWhy Fortuner Ups InverterPrem Chaudhary India100% (1)
- Ablerax Ms - SeriesDocument47 pagesAblerax Ms - SeriesPramote RodbonNo ratings yet
- Functional Range: EC 2: AMF RelayDocument20 pagesFunctional Range: EC 2: AMF RelayChandrashekhar UpparNo ratings yet
- Ford Smart Charge DiagnoseDocument2 pagesFord Smart Charge DiagnoseJoe KnaggeNo ratings yet
- VVVF Error CodesDocument7 pagesVVVF Error CodesIsaac Mangochi100% (2)
- 2011 2 SIEI InverterDocument13 pages2011 2 SIEI InverterfchumpitazNo ratings yet
- Yep Esc ManualDocument2 pagesYep Esc ManualWilliam ReuschelNo ratings yet
- Electric Motor: Project DescriptionDocument20 pagesElectric Motor: Project DescriptionAllen LeeNo ratings yet
- DQ542MA English Manual PDFDocument6 pagesDQ542MA English Manual PDFSteven MillerNo ratings yet
- JRC ErrorcodeDocument98 pagesJRC ErrorcodeNguyen Minh Giap100% (1)
- ESDB AC Servo Drive User ManualDocument92 pagesESDB AC Servo Drive User ManualUsama ZaheerNo ratings yet
- Ses-12 TDPSDocument31 pagesSes-12 TDPSbaljeetjatNo ratings yet
- Mitsubhishi Cop ProgrameDocument61 pagesMitsubhishi Cop ProgrameSunil KumarNo ratings yet
- Manual Driver de CorrientrDocument8 pagesManual Driver de CorrientrRonald Sarzuri VargasNo ratings yet
- CB1224 X ADocument2 pagesCB1224 X ARafatNo ratings yet
- Medi Sinewave UpsDocument20 pagesMedi Sinewave UpsBabuPD67% (6)
- Parker SSD 650 Easy Start GuideDocument17 pagesParker SSD 650 Easy Start Guideeng_karamazabNo ratings yet
- Aotai MZK-IVz Control Box DiagramDocument1 pageAotai MZK-IVz Control Box Diagramhaith2407No ratings yet
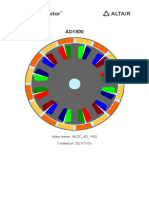
- Motor Name: BLDC - AD - 1400 Created On 2021/11/30Document19 pagesMotor Name: BLDC - AD - 1400 Created On 2021/11/30haith2407No ratings yet
- Revisions Rev. Eco No. Description Date Edited: 110-00039 Cell Li-Ion 21700 Support A3 01Document1 pageRevisions Rev. Eco No. Description Date Edited: 110-00039 Cell Li-Ion 21700 Support A3 01haith2407No ratings yet
- v108 Nb-Series Host Connection Setup Manual enDocument214 pagesv108 Nb-Series Host Connection Setup Manual enhaith2407No ratings yet
- Lab 9 MinchulSDocument6 pagesLab 9 MinchulSMin SoNo ratings yet
- Hairpin FilterDocument6 pagesHairpin FilterShyam SundarNo ratings yet
- Sharp MX 2600nDocument12 pagesSharp MX 2600nAnonymous WD109Uaky100% (1)
- 5th Semester MG University Civil Engineering SyllabusDocument12 pages5th Semester MG University Civil Engineering SyllabusJerrin JustinNo ratings yet
- Java Magazine 2012Document62 pagesJava Magazine 2012nishitcruiseNo ratings yet
- REPEAT 1 Modernizing Microsoft SQL Server On AWS WIN301-R1Document54 pagesREPEAT 1 Modernizing Microsoft SQL Server On AWS WIN301-R1Rajeev JhaNo ratings yet
- Lab 9Document21 pagesLab 9Nizar TayemNo ratings yet
- W410 BAT Wireless Anemometer With AlarmsDocument3 pagesW410 BAT Wireless Anemometer With AlarmsrodineiNo ratings yet
- Lab 09Document4 pagesLab 09F223298 Muhammad Qasim NaveedNo ratings yet
- 3 Query Tuning Introduction m03 Query Designing SlidesDocument16 pages3 Query Tuning Introduction m03 Query Designing SlidesOrcun IyigunNo ratings yet
- Data Transfer SchemeDocument20 pagesData Transfer SchemeJohn PaulNo ratings yet
- Esplink For PC: User Manual (Manu-0024 Rev. 01)Document25 pagesEsplink For PC: User Manual (Manu-0024 Rev. 01)Edwin Vitovis TorresNo ratings yet
- v4 DG7260 DeJong SlidesDocument8 pagesv4 DG7260 DeJong SlidesPaulo PaulNo ratings yet
- Data Sheet 6AG1518-4FP00-4AB0: General InformationDocument11 pagesData Sheet 6AG1518-4FP00-4AB0: General InformationAbdallah AbdelrehimNo ratings yet
- Segmentos Del Tía Portal de ProyectoDocument8 pagesSegmentos Del Tía Portal de ProyectoJulio PampaNo ratings yet
- Previous Year Questions KVS PGT Computer Science PDFDocument5 pagesPrevious Year Questions KVS PGT Computer Science PDFRajatNo ratings yet
- ABAP RoadmapDocument28 pagesABAP RoadmappraveenjuturNo ratings yet
- CP776Document58 pagesCP776jeevan_v_mNo ratings yet
- A File Filter Reads An Input FileDocument11 pagesA File Filter Reads An Input FileVIKRAM KUMARNo ratings yet
- Ansys Workbench Dynamics v11Document28 pagesAnsys Workbench Dynamics v11josehdxNo ratings yet
- ReadmeDocument76 pagesReadmeAditya NobelNo ratings yet
- Esp8266 12e Programming Mode DocumentDocument10 pagesEsp8266 12e Programming Mode DocumentShrivlsi RamNo ratings yet
- CRM Middleware Survival Guide: PurposeDocument7 pagesCRM Middleware Survival Guide: PurposegauravprabhuNo ratings yet
- Java QaDocument201 pagesJava QaNaveen KumarNo ratings yet
- Cable Management SystemDocument8 pagesCable Management SystemSalman RazaNo ratings yet
- TAFC LoggerDocument19 pagesTAFC LoggerMaster Krait100% (2)
- Chapter 4: Threads: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument27 pagesChapter 4: Threads: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 Editiondopewjfpew0ojfhj9efNo ratings yet
- Daivik's ResumeDocument2 pagesDaivik's ResumeKirti GoyalNo ratings yet
- 1274 Wiring DiagramDocument5 pages1274 Wiring Diagrampavli99950% (2)
- How To Relocate An ACFS Filesystem To Another Diskgroup in ExadataDocument5 pagesHow To Relocate An ACFS Filesystem To Another Diskgroup in Exadataambipac@yahoo.comNo ratings yet