You might also like
- ch07 Solution Manual Soil Mechanics and FoundationsDocument48 pagesch07 Solution Manual Soil Mechanics and Foundationsl3nin31489% (9)
- Ch09 Solution Manual Soil Mechanics and FoundationsDocument38 pagesCh09 Solution Manual Soil Mechanics and FoundationsUlysses Arroyo Galvez100% (2)
- Problem Set 1Document13 pagesProblem Set 1redNo ratings yet
- Soln hw2Document28 pagesSoln hw2Hashim Gurmani0% (1)
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument43 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- 5.1 The Number e 5Document5 pages5.1 The Number e 5Hin Wa LeungNo ratings yet
- Autocorrelation: y X U S Euu SDocument15 pagesAutocorrelation: y X U S Euu SRawad JumaaNo ratings yet
- A General Procedure of Estimating Population Mean Using Information On Auxiliary AttributeDocument11 pagesA General Procedure of Estimating Population Mean Using Information On Auxiliary AttributeScience DirectNo ratings yet
- Free energy of a ferromagnet in the Ising modelDocument8 pagesFree energy of a ferromagnet in the Ising modelAnderson Garcia PovedaNo ratings yet
- Chap2 Estimation Procedures 201213Document26 pagesChap2 Estimation Procedures 201213aieyinHengNo ratings yet
- Photonic Sources of LightDocument26 pagesPhotonic Sources of LightNaveen KumarNo ratings yet
- Ece 232 Discrete-Time Signals and Systems Solved Problems I: DT e T X T C and e C T XDocument4 pagesEce 232 Discrete-Time Signals and Systems Solved Problems I: DT e T X T C and e C T XistegNo ratings yet
- Normal Modes of Vibration: One-Dimensional Model # 1Document51 pagesNormal Modes of Vibration: One-Dimensional Model # 1Edgar PuenteNo ratings yet
- Introduction To Statistical Mechanics: Thermodynamics LimitDocument15 pagesIntroduction To Statistical Mechanics: Thermodynamics LimitJaymin RayNo ratings yet
- The Lognormal Random Multivariate: An IntroductionDocument5 pagesThe Lognormal Random Multivariate: An IntroductionDiego Castañeda LeónNo ratings yet
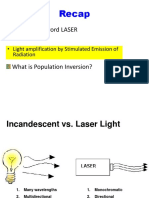
- LASERs PDFDocument84 pagesLASERs PDFGautam NarayanNo ratings yet
- Chap6 PDFDocument62 pagesChap6 PDFmahmoud BiomyNo ratings yet
- Phys 227 08 Lec 2 App BDocument5 pagesPhys 227 08 Lec 2 App BErdvanVianRidvanzNo ratings yet
- SOLUTION METHODS AND STABILITY ANALYSISDocument77 pagesSOLUTION METHODS AND STABILITY ANALYSIStech100% (1)
- Time Integration Fundamentals For ClassDocument50 pagesTime Integration Fundamentals For ClasscucrasNo ratings yet
- Chain of Two Types of AtomDocument85 pagesChain of Two Types of AtomHayat AbadNo ratings yet
- Sequences and SeriesDocument70 pagesSequences and SeriesRaas Venkata Santosh SteelNo ratings yet
- Discrete-Time Fourier Transform ExplainedDocument51 pagesDiscrete-Time Fourier Transform Explained洪崇恩No ratings yet
- DTFT Analysis of SignalsDocument15 pagesDTFT Analysis of SignalsbnatarajNo ratings yet
- 1.02.mathematical Background - AnswersDocument1 page1.02.mathematical Background - AnswersRonald CordovaNo ratings yet
- Physical Chemistry (III)Document32 pagesPhysical Chemistry (III)GraceNo ratings yet
- Xii-1 3Document8 pagesXii-1 3AbdullahNo ratings yet
- Sqqs2083 Sampling Techniques Chapter 4: Stratified SamplingDocument38 pagesSqqs2083 Sampling Techniques Chapter 4: Stratified SamplingaisyaNo ratings yet
- SM 2012 SolnDocument16 pagesSM 2012 SolnrujintoNo ratings yet
- Light Scattering: Basics: R K T E EDocument18 pagesLight Scattering: Basics: R K T E ESimo SoreNo ratings yet
- Assignment 03 RCDocument12 pagesAssignment 03 RCHidden TalentNo ratings yet
- FALLSEM2019-20 ECE1007 TH VL2019201001510 Reference Material I 05-Sep-2019 5. LASERDocument62 pagesFALLSEM2019-20 ECE1007 TH VL2019201001510 Reference Material I 05-Sep-2019 5. LASERnidhi patelNo ratings yet
- MACT-317 Practice Problems 14: Assigned Problems From The Sixth EditionDocument7 pagesMACT-317 Practice Problems 14: Assigned Problems From The Sixth EditionHussein SeoudiNo ratings yet
- Sequences and convergenceDocument16 pagesSequences and convergenceSahik KhnNo ratings yet
- WM3 PDFDocument7 pagesWM3 PDFMohammad Samir HassanNo ratings yet
- Merge SortDocument26 pagesMerge SortSaad Ather MSDS 2021No ratings yet
- E I X I: ProbabilityDocument18 pagesE I X I: ProbabilityMaher1420No ratings yet
- Exponential Fourier SeriesDocument4 pagesExponential Fourier SeriesVincent KiptanuiNo ratings yet
- Lecture 6Document9 pagesLecture 6api-353160711No ratings yet
- Deslandres Table N2DataDocument5 pagesDeslandres Table N2DataPiyali GhoshNo ratings yet
- LEC4 04 خوارزميات أ زاهر مترجمة للطبعDocument30 pagesLEC4 04 خوارزميات أ زاهر مترجمة للطبعhashim alshrfiNo ratings yet
- Quiz 3 - : SolutionDocument2 pagesQuiz 3 - : SolutionRiley mooreoNo ratings yet
- Abstract. We show that √ 2πne P ∼ log (n) : n n n n −nDocument2 pagesAbstract. We show that √ 2πne P ∼ log (n) : n n n n −nAnonymous BrHlRuDNo ratings yet
- Fast Fourier Transforms: Quote of The DayDocument13 pagesFast Fourier Transforms: Quote of The DayNarendra ChaurasiaNo ratings yet
- 8 Sequence and SeriesDocument45 pages8 Sequence and SeriesnrrarishaNo ratings yet
- System Identification Basics System Identification IsDocument7 pagesSystem Identification Basics System Identification IsAyyar KandasamyNo ratings yet
- Toaz - Info Chapter 4 Transformers PRDocument37 pagesToaz - Info Chapter 4 Transformers PRMostafa MongyNo ratings yet
- Analytical Dynamics: With An Introduction To Dynamical SystemsDocument278 pagesAnalytical Dynamics: With An Introduction To Dynamical SystemsClaudio GeloniNo ratings yet
- Distribution of Quadratic FormsDocument7 pagesDistribution of Quadratic FormsSakshi Vashishtha100% (1)
- Strain LifeDocument11 pagesStrain LifeChuoiEmNo ratings yet
- One-Way ANOVA For Single ObsDocument8 pagesOne-Way ANOVA For Single ObsKazi Naimur Rahaman EmonNo ratings yet
- National Junior College Mathematics Department 2016 Sequences & Series SummaryDocument2 pagesNational Junior College Mathematics Department 2016 Sequences & Series SummaryyslnjuNo ratings yet
- Intro To SignalsDocument17 pagesIntro To SignalsSampath KumarNo ratings yet
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument41 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- Home ExamDocument50 pagesHome ExamBadr AmmarNo ratings yet
- Pointers 1Document4 pagesPointers 1Siako IkawNo ratings yet
- Chapter 9Document10 pagesChapter 9bakmugzaNo ratings yet
- Stratified SamplingDocument21 pagesStratified Samplingasistensi pakNo ratings yet
- PhD. Bach Thi My Hien's Guide to ElectrochemistryDocument31 pagesPhD. Bach Thi My Hien's Guide to ElectrochemistryMỹ TâmNo ratings yet
- LA211DBD InfiniteDocument6 pagesLA211DBD InfiniteLastCardHolderNo ratings yet
- Electrical Machines and Control: REAL TransformersDocument25 pagesElectrical Machines and Control: REAL TransformersAmmar Syahid RabbaniNo ratings yet
- Modulator Basics: Special Topics in Optical Comm.: Si Photonics (11/1)Document6 pagesModulator Basics: Special Topics in Optical Comm.: Si Photonics (11/1)ashutosh199625No ratings yet
- Non Linear OpticsDocument33 pagesNon Linear OpticsJay D. B.No ratings yet
- Electrical Interactions in Molecular Biophysics: An IntroductionFrom EverandElectrical Interactions in Molecular Biophysics: An IntroductionRaymond GablerNo ratings yet
- HW10, Hooman KargarDocument12 pagesHW10, Hooman KargarabimalainNo ratings yet
- Pixelated Dam PagesDocument48 pagesPixelated Dam PagesabimalainNo ratings yet
- X X X X A X: Onlinear OscillationsDocument1 pageX X X X A X: Onlinear OscillationsabimalainNo ratings yet
- Nag 1610190805Document8 pagesNag 1610190805abimalainNo ratings yet
- ProgSpec-H2A1 H2A2 H2A3 H2U5-2021-22Document16 pagesProgSpec-H2A1 H2A2 H2A3 H2U5-2021-22abimalainNo ratings yet
- Pixelated Dam PagesDocument48 pagesPixelated Dam PagesabimalainNo ratings yet
- Lesson 06 2015Document52 pagesLesson 06 2015abimalainNo ratings yet
- Thermal Analysis in GeomechanicsDocument44 pagesThermal Analysis in GeomechanicsabimalainNo ratings yet
- Lesson 03 2015Document48 pagesLesson 03 2015abimalainNo ratings yet
- Numerical Methods for Geotechnical Engineers 2D Consolidation ExampleDocument69 pagesNumerical Methods for Geotechnical Engineers 2D Consolidation ExampleabimalainNo ratings yet
- Sample Dam BDocument67 pagesSample Dam BabimalainNo ratings yet
- Pixelated DamDocument66 pagesPixelated DamabimalainNo ratings yet
- Assignment 2 2016Document2 pagesAssignment 2 2016abimalainNo ratings yet
- Assignment 1Document2 pagesAssignment 1abimalainNo ratings yet
- Lesson 10 2015Document102 pagesLesson 10 2015abimalainNo ratings yet
- CEE 9571 - Advanced Concrete TechnologyDocument3 pagesCEE 9571 - Advanced Concrete TechnologyabimalainNo ratings yet
- 2015 Lesson06 Example1Document7 pages2015 Lesson06 Example1abimalainNo ratings yet
- Assignment 3 2016Document2 pagesAssignment 3 2016abimalainNo ratings yet
- 2015 Lesson07 Example 1Document70 pages2015 Lesson07 Example 1abimalainNo ratings yet
- Stability Chapter 03Document14 pagesStability Chapter 03abimalainNo ratings yet
- Stability Chapter 05Document8 pagesStability Chapter 05abimalainNo ratings yet
- Applsci 11 03213 v2Document17 pagesApplsci 11 03213 v2abimalainNo ratings yet
- Module 8 Worksheet(副本)Document1 pageModule 8 Worksheet(副本)abimalainNo ratings yet
- Torsion PDFDocument20 pagesTorsion PDFBryan VillalobosNo ratings yet
- 2015 Lesson06 Example4Document37 pages2015 Lesson06 Example4abimalainNo ratings yet
- Module 12 WorksheetDocument1 pageModule 12 WorksheetabimalainNo ratings yet
- Module 11 WorksheetDocument1 pageModule 11 WorksheetabimalainNo ratings yet
- Module 10 WorksheetDocument1 pageModule 10 WorksheetabimalainNo ratings yet
- Ugc Net Exam Daa PDFDocument94 pagesUgc Net Exam Daa PDFRamesh KaliaNo ratings yet
- Time Frequency AnalysisDocument174 pagesTime Frequency AnalysisManjeet SinghNo ratings yet
- The Design of A Multi-Bit Sigma-Delta ADC Modulator: Yang Shaojun, Tong Ziquan, Jiang Yueming, Dou NaiyingDocument4 pagesThe Design of A Multi-Bit Sigma-Delta ADC Modulator: Yang Shaojun, Tong Ziquan, Jiang Yueming, Dou Naiyingchaitanya sNo ratings yet
- Mcq's On Unit VDocument6 pagesMcq's On Unit Vbigbang100% (1)
- 1.modulation Recognition With Graph Convolutional Network PDFDocument4 pages1.modulation Recognition With Graph Convolutional Network PDFGONGNo ratings yet
- Experiment 1: Generation of Basic SignalsDocument19 pagesExperiment 1: Generation of Basic SignalsSevandhiNo ratings yet
- Bract’s Vishwakarma Institute of Information Technology, Pune. Applications of Hash Table in Merkle TreeDocument10 pagesBract’s Vishwakarma Institute of Information Technology, Pune. Applications of Hash Table in Merkle TreeTushar KhobragadeNo ratings yet
- HW 5Document5 pagesHW 5Ali Berkcan BoyluNo ratings yet
- InterpolationDocument37 pagesInterpolationMyWBUT - Home for Engineers100% (2)
- Variational Methods IntroDocument68 pagesVariational Methods Introliuhuaxia.japanNo ratings yet
- BBD Bucket StandfordDocument33 pagesBBD Bucket StandfordKotorrNo ratings yet
- KSV - DC - IT 702 - April 2020 - APDocument2 pagesKSV - DC - IT 702 - April 2020 - APmalavNo ratings yet
- ME513 Finite Element Method in Engineering Assignment-1 - Ankit Sejwar B17115Document8 pagesME513 Finite Element Method in Engineering Assignment-1 - Ankit Sejwar B17115Ankit SejwarNo ratings yet
- A Study of Garbage Classification With CNNDocument6 pagesA Study of Garbage Classification With CNNRezwan AhmedNo ratings yet
- Chapter 2 Pixel RelationDocument33 pagesChapter 2 Pixel RelationSaikarNo ratings yet
- Hart Ing Tons MethodDocument8 pagesHart Ing Tons MethodramataramNo ratings yet
- CS530 ApproximationDocument12 pagesCS530 ApproximationShagunNo ratings yet
- 7 CS1AC16 Simple Neural NetworkDocument3 pages7 CS1AC16 Simple Neural NetworkAnna AbcxyzNo ratings yet
- QTM (Unit 2)Document11 pagesQTM (Unit 2)Arkhitekton DesignNo ratings yet
- Numerical Integration FormulasDocument60 pagesNumerical Integration FormulasBeverly PamanNo ratings yet
- STABILITY (Control System) : By-Vaibhav JindalDocument17 pagesSTABILITY (Control System) : By-Vaibhav JindalMunther MohdNo ratings yet
- © 2004 Goodrich, Tamassia Depth-First Search 1Document14 pages© 2004 Goodrich, Tamassia Depth-First Search 1Lucian RodjanNo ratings yet
- Hughes, T. J. R. (Hughes, Thomas J. R.) (1-TX-CPE) Reali, A. (Reali, Alessandro) (I-PAVI-MC) Sangalli, G. (I-PAVI)Document2 pagesHughes, T. J. R. (Hughes, Thomas J. R.) (1-TX-CPE) Reali, A. (Reali, Alessandro) (I-PAVI-MC) Sangalli, G. (I-PAVI)Machine DesignNo ratings yet
- Cs224n 2023 Lecture05 RNNLMDocument68 pagesCs224n 2023 Lecture05 RNNLMwaleed grayNo ratings yet
- Banker's AlgorithmDocument3 pagesBanker's AlgorithmBonam Mani Krishna0% (1)
- Indirect Methods For Solving Systems of Linear EquationsDocument38 pagesIndirect Methods For Solving Systems of Linear EquationsAmiin HirphoNo ratings yet
- JHS Math Reviewer 2nd QuarterDocument2 pagesJHS Math Reviewer 2nd QuarterPioh Warren FiloteoNo ratings yet
- Convolution and Signal Processing FundamentalsDocument22 pagesConvolution and Signal Processing Fundamentals174A1 HindupriyaNo ratings yet