You might also like
- NU eNod3C CAN E 1109 - 165717 EDocument37 pagesNU eNod3C CAN E 1109 - 165717 EfakhriNo ratings yet
- Montageanleitung Notice de Montage: Mounting InstructionsDocument72 pagesMontageanleitung Notice de Montage: Mounting Instructionsjasonrla233No ratings yet
- 12d Advanced StormwaterDocument72 pages12d Advanced StormwaterarnoldNo ratings yet
- Operation Manual: CV-S3200 (From Rev.D) CV-S3300 (From Rev.C)Document17 pagesOperation Manual: CV-S3200 (From Rev.D) CV-S3300 (From Rev.C)Amit AGRAWALNo ratings yet
- HV MV and LV Network Development Technical Criteria-Ex GUI-E&C-ND-2022-0083-ex PL 28 - 2.0Document89 pagesHV MV and LV Network Development Technical Criteria-Ex GUI-E&C-ND-2022-0083-ex PL 28 - 2.0diegofer1No ratings yet
- 12d Advanced Storm WaterDocument72 pages12d Advanced Storm WaterTon HoNo ratings yet
- DCS800 Rebuilt KitDocument66 pagesDCS800 Rebuilt KitCharoon SuriyawichitwongNo ratings yet
- CANopen ScaimeDocument44 pagesCANopen ScaimeRadon MasteNo ratings yet
- PKT 23 - B5B 7109 00Document23 pagesPKT 23 - B5B 7109 00Asesoría Técnica - OmnitronecNo ratings yet
- Quick Start Guide: AED9101D AED9501ADocument108 pagesQuick Start Guide: AED9101D AED9501AEmpacadora del GolfoNo ratings yet
- Ad 622 DiscriptionDocument20 pagesAd 622 DiscriptionZenache AhlemNo ratings yet
- EGPWS Ts ManualDocument62 pagesEGPWS Ts ManualAdrianKoCM100% (4)
- CompaxUG6 99Document200 pagesCompaxUG6 99Cesar Augusto Perez SilvaNo ratings yet
- CP2105Document24 pagesCP2105acechoeNo ratings yet
- Plugin Vol43n2Document32 pagesPlugin Vol43n2Muhammad ShihabNo ratings yet
- DMC PlusDocument156 pagesDMC Plusedo7474No ratings yet
- Pci 1711Document60 pagesPci 1711JCNo ratings yet
- APC122 - Technical Leaflet - V14 - CustomerDocument28 pagesAPC122 - Technical Leaflet - V14 - CustomerCATALOGOS 83MNo ratings yet
- Remote Data Interface RDI 24-001D, Digital (MAN11620-11)Document41 pagesRemote Data Interface RDI 24-001D, Digital (MAN11620-11)justinNo ratings yet
- c1455dx enDocument40 pagesc1455dx enrex lapitanNo ratings yet
- THDB ADA UserGuide 03 PDFDocument25 pagesTHDB ADA UserGuide 03 PDFeppak9898No ratings yet
- STM32 ADC AccuracyDocument32 pagesSTM32 ADC Accuracymail87523No ratings yet
- Ecdis-24 01Document4 pagesEcdis-24 01Leandro PintoNo ratings yet
- Operation Manual: Compact Monochrome Megapixel Progressive Scan CameraDocument24 pagesOperation Manual: Compact Monochrome Megapixel Progressive Scan CameraAndersonNo ratings yet
- 0178 405 enDocument24 pages0178 405 enabuzer1981No ratings yet
- Os d202 - 2008 10Document42 pagesOs d202 - 2008 10jusalinNo ratings yet
- MAN11620-10 Installation Manual For RDI 24-001D Remote Digital Data InterfaceDocument39 pagesMAN11620-10 Installation Manual For RDI 24-001D Remote Digital Data InterfaceMehmet TaşçıNo ratings yet
- 6GK15621AA00 Datasheet enDocument3 pages6GK15621AA00 Datasheet enchandrakrishna8No ratings yet
- TMS320F2812-Analogue To Digital ConverterDocument26 pagesTMS320F2812-Analogue To Digital ConverterPantech ProLabs India Pvt LtdNo ratings yet
- Ic DataDocument30 pagesIc DatawayanwijaNo ratings yet
- MAX20459 Automotive High-Current Step-Down Converter With USB-C Dedicated Charging PortDocument57 pagesMAX20459 Automotive High-Current Step-Down Converter With USB-C Dedicated Charging PortmstrkoskiNo ratings yet
- Digital Instruments and Measuring TransducersDocument36 pagesDigital Instruments and Measuring TransducersAnas BasarahNo ratings yet
- Manual Radio MDS 4710ADocument58 pagesManual Radio MDS 4710AOmar FernandoNo ratings yet
- 5 Nhl2 CameraDocument14 pages5 Nhl2 CameraVictor Antonio Guzman SandovalNo ratings yet
- CP2102Document18 pagesCP2102gigel1980No ratings yet
- App Arm JtagDocument34 pagesApp Arm JtagbalzoniaNo ratings yet
- D2 - DCM Data Communications ModuleDocument70 pagesD2 - DCM Data Communications ModuleSilvia Del RioNo ratings yet
- Upgrade: NWD-134142-01E 5000iPS: UPGRADE December, 2011Document14 pagesUpgrade: NWD-134142-01E 5000iPS: UPGRADE December, 2011BwaiNo ratings yet
- Manual: Digital Battery Drive HV - IsolationDocument51 pagesManual: Digital Battery Drive HV - IsolationLuuvan DuanNo ratings yet
- S7-1200 1214CDocument14 pagesS7-1200 1214Cnyamai20008234No ratings yet
- Operating Instruction AM MODBUSDocument16 pagesOperating Instruction AM MODBUSAh MedNo ratings yet
- Operators Manual Danelec VDR DM200-DM500Document42 pagesOperators Manual Danelec VDR DM200-DM500Adi Prasetyo50% (2)
- Digital Oscilloscope With FPGADocument36 pagesDigital Oscilloscope With FPGAAhmed YasserNo ratings yet
- Slaa 343Document12 pagesSlaa 343ugmadhuNo ratings yet
- Qseven Congaqmx6Document63 pagesQseven Congaqmx6samNo ratings yet
- Rio Grande Users Guide - Nov07Document32 pagesRio Grande Users Guide - Nov07Daniel magallanesNo ratings yet
- Proservo NMS5Document38 pagesProservo NMS5abcNo ratings yet
- Liquiline CM442Document49 pagesLiquiline CM442Beth Rodil SolanoNo ratings yet
- Quantum DS Capabilities OverviewDocument27 pagesQuantum DS Capabilities OverviewdzarateNo ratings yet
- DSFG Gateways C1 and C2 Series 2: Technical Documentation Function, Operation, Commissioning and MaintenanceDocument54 pagesDSFG Gateways C1 and C2 Series 2: Technical Documentation Function, Operation, Commissioning and MaintenancevishadkapadiaNo ratings yet
- An GSHDSL XX User ManualDocument58 pagesAn GSHDSL XX User ManualkotafiNo ratings yet
- Technical Information Liquiline CM442/CM444/CM448Document52 pagesTechnical Information Liquiline CM442/CM444/CM448Juan Rodriguez ArevaloNo ratings yet
- E Bamocar d3Document50 pagesE Bamocar d3MihaiNeacsuNo ratings yet
- sn75hvd12 PDFDocument37 pagessn75hvd12 PDFAnonymous mYNls8PNo ratings yet
- DB50L Medidor de Nivel HDocument60 pagesDB50L Medidor de Nivel HLICONSA MICHOACANNo ratings yet
- Fisher Fieldvue Dvc6000 Digital Valve Controller Quick Start Guide ManualDocument44 pagesFisher Fieldvue Dvc6000 Digital Valve Controller Quick Start Guide ManualpauloNo ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- Data Sheet 3SU1000-1HB20-0AA0: EnclosureDocument3 pagesData Sheet 3SU1000-1HB20-0AA0: EnclosureJitNo ratings yet
- Bill of Material Smidnya Technologies PVT LTD: Project / Ticket Number Project /ticket NameDocument3 pagesBill of Material Smidnya Technologies PVT LTD: Project / Ticket Number Project /ticket NameJitNo ratings yet
- Curent Protection Relay 900CPR-1-BL-U: FeaturesDocument2 pagesCurent Protection Relay 900CPR-1-BL-U: FeaturesJitNo ratings yet
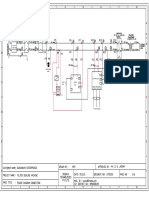
- 5 POWER DIAGRAM OFFLINE-ModelDocument1 page5 POWER DIAGRAM OFFLINE-ModelJitNo ratings yet
- Bus Bar Selection Chart AluminiumDocument1 pageBus Bar Selection Chart AluminiumJit0% (1)
- 3SU10001HB200AA0 Datasheet enDocument3 pages3SU10001HB200AA0 Datasheet enJitNo ratings yet
- Uganda Standard: Power Transformers - Specification - Part 5: Ability To Withstand Short CircuitDocument45 pagesUganda Standard: Power Transformers - Specification - Part 5: Ability To Withstand Short CircuitJitNo ratings yet
- Data Sheet For SINAMICS Power Module PM240-2: Article No.: 6SL3210-1PE14-3UL1Document2 pagesData Sheet For SINAMICS Power Module PM240-2: Article No.: 6SL3210-1PE14-3UL1JitNo ratings yet
- 3SU10001HB200AA0 Datasheet enDocument3 pages3SU10001HB200AA0 Datasheet enJitNo ratings yet
- Green Wire Brochure - 1Document8 pagesGreen Wire Brochure - 1JitNo ratings yet
- Data Sheet 6AV2128-3GB06-0AX0: General InformationDocument6 pagesData Sheet 6AV2128-3GB06-0AX0: General InformationJitNo ratings yet
- Path 2 - Module 2.3 HandoutsDocument3 pagesPath 2 - Module 2.3 HandoutsJULIAANTONETTE DAVEN100% (1)
- Strong360 Vol3 May 2014Document51 pagesStrong360 Vol3 May 2014Константин ИвановNo ratings yet
- 22 Scheme Physics For Cse Module 5 NotesDocument32 pages22 Scheme Physics For Cse Module 5 Notesjayanthibalasubramani2100% (1)
- Newtonian Mechanics: MYP4 Physics NotesDocument15 pagesNewtonian Mechanics: MYP4 Physics NotesKrish Madhav ShethNo ratings yet
- Seca - 766 & 767 Scale Service ManualDocument28 pagesSeca - 766 & 767 Scale Service ManualWaseem AlmuhtasebNo ratings yet
- Discrete Element Method Modelling of A Centrifugal Fertiliser SpreaderDocument19 pagesDiscrete Element Method Modelling of A Centrifugal Fertiliser Spreader李国振No ratings yet
- 8 Week Work OutDocument11 pages8 Week Work OutLisa -No ratings yet
- Intelligent-Lab™ Milligram Balance: SeriesDocument2 pagesIntelligent-Lab™ Milligram Balance: SeriesKevin LeonardoNo ratings yet
- AVD 07 Funicular MethodDocument13 pagesAVD 07 Funicular Methodabinash SethiNo ratings yet
- Quantities Dimensions MKS and CGS UnitsDocument2 pagesQuantities Dimensions MKS and CGS UnitsSanjayNo ratings yet
- Assignment On ME233Document5 pagesAssignment On ME233Alif Mahmud NafiNo ratings yet
- IV Rigel Automated Nutritional Status Bosy Sy 2022 2023Document9 pagesIV Rigel Automated Nutritional Status Bosy Sy 2022 2023juan martin arevaloNo ratings yet
- Manual of Basic Techniques For A Health Laboratory (Part1) - WHODocument114 pagesManual of Basic Techniques For A Health Laboratory (Part1) - WHOcholinchuchuNo ratings yet
- Cessna R172K Hawk XP POH PDFDocument235 pagesCessna R172K Hawk XP POH PDFLuis Carlos ChibuqueNo ratings yet
- EXP 5 Unit WeightDocument4 pagesEXP 5 Unit WeightRochelleNo ratings yet
- BB & KB Functional MuscleDocument11 pagesBB & KB Functional MuscleAndreea SlavoacaNo ratings yet
- Introduction and Discussion of Theories ObjectiveDocument11 pagesIntroduction and Discussion of Theories ObjectiveAryan Vincent A. CaballeroNo ratings yet
- Physics Coursework A LevelDocument5 pagesPhysics Coursework A Levelsyn0tiwemym3100% (2)
- OOP Assignment-2Document18 pagesOOP Assignment-2ShantanuNo ratings yet
- Youngs Modulus - Non Uniform BendingDocument5 pagesYoungs Modulus - Non Uniform Bendingdurairajgeetha318No ratings yet
- Topic 2 - Newton's LawsDocument35 pagesTopic 2 - Newton's LawsMay AuditorNo ratings yet
- Math Problem Solving: Exploring Capacity: MeasurementDocument28 pagesMath Problem Solving: Exploring Capacity: MeasurementpuputNo ratings yet
- Egg Drop Write-UpDocument3 pagesEgg Drop Write-Upsoadquake981100% (2)
- A Detailed Lesson Plan in Science VI 1 2Document10 pagesA Detailed Lesson Plan in Science VI 1 2galange267No ratings yet
- 2008 BalanceDocument26 pages2008 Balancesinner86No ratings yet
- FA20 Lab 2 Procedure Discussion Uncertainty PDFDocument30 pagesFA20 Lab 2 Procedure Discussion Uncertainty PDFAkaash SharmaNo ratings yet
- CADRE (Analysis of Geodesic Dome)Document36 pagesCADRE (Analysis of Geodesic Dome)adityapandey285100% (1)
- Belt Weigher CalibrationDocument3 pagesBelt Weigher CalibrationClint GarciaNo ratings yet
- Macro Calculator Count Your Macros Like A Pro!Document1 pageMacro Calculator Count Your Macros Like A Pro!LalaNo ratings yet
- Final Estimates Level 1 ManualDocument114 pagesFinal Estimates Level 1 ManualenesNo ratings yet