You might also like
- THE BOOK OF THE TWELVE and THE NEW FORM PDFDocument380 pagesTHE BOOK OF THE TWELVE and THE NEW FORM PDFEq Brown100% (1)
- Vocabulary in Context PowerpointDocument47 pagesVocabulary in Context Powerpointhaneenlatif50% (2)
- Auto Irrigation System Using ArduinoDocument22 pagesAuto Irrigation System Using ArduinoShreemanti RokadeNo ratings yet
- 5 Reasons The Catholic Church Is The True ChurchDocument31 pages5 Reasons The Catholic Church Is The True ChurchJj ArabitNo ratings yet
- Arthur E. Waite - Elfin Music - An Anthology of English Fairy Poetry (1888)Document328 pagesArthur E. Waite - Elfin Music - An Anthology of English Fairy Poetry (1888)Raphael888No ratings yet
- Tutorial - Creating Forms PDFDocument9 pagesTutorial - Creating Forms PDFBlashko GjorgjievNo ratings yet
- Automated Solar Irrigation System by UsiDocument7 pagesAutomated Solar Irrigation System by UsiDELELEGN TSEGAYENo ratings yet
- 230606-WN-ES-MSFT-GitHub Copilot La Inteligencia Artificial Al Servicio de Los DesarrolladoresDocument14 pages230606-WN-ES-MSFT-GitHub Copilot La Inteligencia Artificial Al Servicio de Los DesarrolladoresAntonio FernandezNo ratings yet
- Design and Monitoring of Water Level System Using Sensor TechnologyDocument3 pagesDesign and Monitoring of Water Level System Using Sensor TechnologyIJSTENo ratings yet
- Automatic Sprinkler System Using Arduino.: G M Barbade, Mahajan Vasudha, Pasarge Sanika, Shinde SandhyaDocument5 pagesAutomatic Sprinkler System Using Arduino.: G M Barbade, Mahajan Vasudha, Pasarge Sanika, Shinde SandhyaHanan ShayiboNo ratings yet
- Chapter OneDocument47 pagesChapter Onewako safayiNo ratings yet
- Manual de Escritura de TeatroDocument122 pagesManual de Escritura de TeatroXimena BenavidesNo ratings yet
- Jurnal 1 2020Document9 pagesJurnal 1 2020Nur AfiyatNo ratings yet
- IJCRT2202447Document5 pagesIJCRT2202447abcdef ghijkNo ratings yet
- Project Report Part 3Document13 pagesProject Report Part 3Anirudh AryanNo ratings yet
- Rancangan Dan Uji Coba Otomatisasi Irigasi Kendi DDocument15 pagesRancangan Dan Uji Coba Otomatisasi Irigasi Kendi DridhodiasNo ratings yet
- Rancangan Dan Uji Coba Otomatisasi Irigasi Kendi D PDFDocument15 pagesRancangan Dan Uji Coba Otomatisasi Irigasi Kendi D PDFDian PranataNo ratings yet
- IJCRT2202447Document4 pagesIJCRT2202447abcdef ghijkNo ratings yet
- Jurnal IptekDocument10 pagesJurnal IptekIrin DwiNo ratings yet
- JETIR2003170Document4 pagesJETIR2003170Yemar MekuantNo ratings yet
- An IoT Based Energy Saving Automatic Watering System For PlantsDocument7 pagesAn IoT Based Energy Saving Automatic Watering System For PlantsArvie ClenchNo ratings yet
- Water Unit Control SystemDocument2 pagesWater Unit Control SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Iot 1Document30 pagesIot 1BALAKUMAR CNo ratings yet
- Design and Implementation of Water Bill Control System Based GSMDocument5 pagesDesign and Implementation of Water Bill Control System Based GSMPeter MulengaNo ratings yet
- Solar Aqua Guard: A Next-Gen IoT Approach To Water Tank MonitoringDocument6 pagesSolar Aqua Guard: A Next-Gen IoT Approach To Water Tank MonitoringInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Water Management ReportDocument15 pagesWater Management ReportAshishNo ratings yet
- Control Valve For Irrigation PurposeDocument38 pagesControl Valve For Irrigation PurposeAjit KalasaitNo ratings yet
- Automated Water Usage Monitoring System: Sajith Saseendran, V.NithyaDocument5 pagesAutomated Water Usage Monitoring System: Sajith Saseendran, V.NithyaKokoh RayNo ratings yet
- 03 Smart Water Irrigation SystemDocument48 pages03 Smart Water Irrigation SystemTejaswini UpadhyeNo ratings yet
- A Review On Modern Irrigation Technologies For Water ManagementDocument11 pagesA Review On Modern Irrigation Technologies For Water ManagementDaniela HossuNo ratings yet
- Design and Trial of Sprinkler Irrigation Automation: Rancangan Dan Uji Coba Otomatisasi Irigasi CurahDocument10 pagesDesign and Trial of Sprinkler Irrigation Automation: Rancangan Dan Uji Coba Otomatisasi Irigasi CurahAsep SyahrilNo ratings yet
- Fin Irjmets1653546359Document5 pagesFin Irjmets1653546359ekalrudy20No ratings yet
- Sensor Based Automatic Drip Irrigation SystemDocument4 pagesSensor Based Automatic Drip Irrigation SystemJournal 4 ResearchNo ratings yet
- Water Level Controller Using Ultrasonic SensorDocument8 pagesWater Level Controller Using Ultrasonic SensorIJRASETPublicationsNo ratings yet
- Microcontroller Based Water Level IndicatorDocument46 pagesMicrocontroller Based Water Level IndicatorSurabhi Sadavat0% (1)
- IoT Based AutomaticsDocument8 pagesIoT Based AutomaticsAkula GYNANINo ratings yet
- Cloud Based Smart Water MeterDocument3 pagesCloud Based Smart Water Meteryisakabera123No ratings yet
- JTIKA-Cani Ananta SavitriDocument9 pagesJTIKA-Cani Ananta SavitriCaniAnantaNo ratings yet
- AMR and Controlling Water Supply Using PLC: Prithviraj Janugade, Pranit Jadhav, Supriya Kadam, Prof. M.P. GajareDocument4 pagesAMR and Controlling Water Supply Using PLC: Prithviraj Janugade, Pranit Jadhav, Supriya Kadam, Prof. M.P. GajareerpublicationNo ratings yet
- M1G3-Water Management SystemDocument39 pagesM1G3-Water Management SystemRashad ElmabrukNo ratings yet
- 344-Article Text-1295-1-10-20190630Document22 pages344-Article Text-1295-1-10-20190630NewRiverXNo ratings yet
- Ijsrr d438Document5 pagesIjsrr d438Mahinbanu VatharadNo ratings yet
- Anisha 2017Document6 pagesAnisha 2017Dylan Giusep Barajas De LimaNo ratings yet
- Sistem Kontroli IrigasiDocument6 pagesSistem Kontroli IrigasiSyaiful ArifinNo ratings yet
- A Review On Arduino Based Automatic Water Pump Level Adjustment and Monitoring SystemDocument6 pagesA Review On Arduino Based Automatic Water Pump Level Adjustment and Monitoring SystemIJRASETPublicationsNo ratings yet
- Solar Panel Based Automatic Plant Irrigation SystemDocument4 pagesSolar Panel Based Automatic Plant Irrigation SystemakashlogicNo ratings yet
- Microcontroller Based Water Level Indicator and ControllerDocument2 pagesMicrocontroller Based Water Level Indicator and ControllerSaikiran RaoNo ratings yet
- Detection of Glaucoma and Microaneurysm in Retinal Fundus Images Based On Optic Disk and Optic Cup SegmentationDocument3 pagesDetection of Glaucoma and Microaneurysm in Retinal Fundus Images Based On Optic Disk and Optic Cup SegmentationEditor IJRITCCNo ratings yet
- Automatic Water Level Sensing Using Voice ControlDocument43 pagesAutomatic Water Level Sensing Using Voice ControlKathir RamasamyNo ratings yet
- Fin Irjmets1653202007Document7 pagesFin Irjmets1653202007Mohammed GalibNo ratings yet
- GE-International Journal of Engineering Research: Automated Water Level ControllerDocument14 pagesGE-International Journal of Engineering Research: Automated Water Level ControllerSounds of PeaceNo ratings yet
- Jurnal Latief Siap Cetak InggrisDocument8 pagesJurnal Latief Siap Cetak Inggrisyanuar mamiNo ratings yet
- Automatic Water Level Controller For Overhead and Underground Water TankDocument5 pagesAutomatic Water Level Controller For Overhead and Underground Water TankPoonam KilaniyaNo ratings yet
- Microcontroller Based Water Level Indicator and Controller: June 2017Document3 pagesMicrocontroller Based Water Level Indicator and Controller: June 2017NandhiniNo ratings yet
- Smart Water Management System Using ArduinoDocument4 pagesSmart Water Management System Using ArduinoGRD JournalsNo ratings yet
- Design and Implementation of A Microcontroller-Based Water Level Control System With Seven Segment Display For Domestic and Laboratory ApplicationDocument6 pagesDesign and Implementation of A Microcontroller-Based Water Level Control System With Seven Segment Display For Domestic and Laboratory ApplicationDinesh SinghNo ratings yet
- ReportDocument8 pagesReportsushantsaurav18No ratings yet
- Smart Irrigation System Based On Soil Moisture Using IotDocument5 pagesSmart Irrigation System Based On Soil Moisture Using IotSureshkumar AlagarsamyNo ratings yet
- Wireless Water Usage Monitoring System For Home SMDocument10 pagesWireless Water Usage Monitoring System For Home SMSyed M. YaseenNo ratings yet
- Automatic Water Level Controller: Deepti Rawat, Dinesh Kumar Yadav, S.K. MahajanDocument4 pagesAutomatic Water Level Controller: Deepti Rawat, Dinesh Kumar Yadav, S.K. MahajanSounds of PeaceNo ratings yet
- Irjet-Automatic Irrigation System Using Arduino: Related PapersDocument4 pagesIrjet-Automatic Irrigation System Using Arduino: Related PapersglezzyNo ratings yet
- Wireless Automatic Plant Irrigation System: Vinay Bakale, Siddesh TalokarDocument5 pagesWireless Automatic Plant Irrigation System: Vinay Bakale, Siddesh Talokarﹺ ﹺ ﹺ ﹺNo ratings yet
- Automated Irrigation System: H.T.Ingale, N.N.KasatDocument4 pagesAutomated Irrigation System: H.T.Ingale, N.N.KasatKaio CesarNo ratings yet
- Development of Dam Controller TechnologyDocument8 pagesDevelopment of Dam Controller TechnologyDan Jenniel CedeñoNo ratings yet
- GJRECS2310126Document6 pagesGJRECS2310126ekalrudy20No ratings yet
- Automated Irrigation System With The Integration of Internet of Things For Agricultural ApplicationsDocument6 pagesAutomated Irrigation System With The Integration of Internet of Things For Agricultural ApplicationsJhanina CapicioNo ratings yet
- Module BDocument6 pagesModule BDaniellhy 10No ratings yet
- Python Module 4Document115 pagesPython Module 4SANAL KUMARNo ratings yet
- Anastasis PDFDocument33 pagesAnastasis PDFbagiro77No ratings yet
- Prepositional Phrases - Worksheet - Grade 7Document3 pagesPrepositional Phrases - Worksheet - Grade 7zizo gamingNo ratings yet
- Data Visualization Cheatsheet 1702209209Document7 pagesData Visualization Cheatsheet 1702209209valdezrominapyNo ratings yet
- Azure 3Document12 pagesAzure 3felixhahn721No ratings yet
- In English Grammar There Are 8 Parts of SpeechDocument4 pagesIn English Grammar There Are 8 Parts of SpeechNurasyikin RusleNo ratings yet
- Vector Math For 3D Computer GraphicsDocument322 pagesVector Math For 3D Computer Graphicsapi-19523062100% (1)
- ConsessionDocument17 pagesConsessionHasna Amada RamaniaNo ratings yet
- Nullable Reference Types - Microsoft DocsDocument9 pagesNullable Reference Types - Microsoft DocssanamNo ratings yet
- Datos mv440Document39 pagesDatos mv440David Santos LatorreNo ratings yet
- Exercise 7: Adverbs and AdjectivesDocument12 pagesExercise 7: Adverbs and AdjectivesAnakpakcik AzizNo ratings yet
- B2 Course: Unit 63 - Passive Vs Active VoiceDocument4 pagesB2 Course: Unit 63 - Passive Vs Active VoiceEugeniaNo ratings yet
- GeosynclinalDocument11 pagesGeosynclinaldayana suarez100% (1)
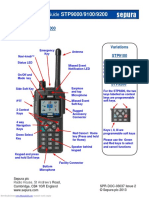
- STP 9000Document4 pagesSTP 9000Ray BannyNo ratings yet
- Reflection MemoDocument1 pageReflection Memopsk5031No ratings yet
- Multi Format LFDocument17 pagesMulti Format LFIssac NewtonNo ratings yet
- Pkm-Ai-Daun PoinsetitaDocument13 pagesPkm-Ai-Daun PoinsetitaNIMASNo ratings yet
- Disc HandoutDocument38 pagesDisc HandoutTesfu HettoNo ratings yet
- Making Polite Requests PracticeDocument1 pageMaking Polite Requests PracticeSantiago MaldonadoNo ratings yet
- January 2019 (IAL) QP - C34 EdexcelDocument14 pagesJanuary 2019 (IAL) QP - C34 EdexcelВася МищенкоNo ratings yet
- The Kite Runner (Pashtun and Hazara Conflict)Document7 pagesThe Kite Runner (Pashtun and Hazara Conflict)balliinjr100% (1)
- Letter To Conduct TrainingDocument8 pagesLetter To Conduct TrainingDeborah OmilesNo ratings yet