You might also like
- 第七章 状态机设计Document63 pages第七章 状态机设计张浩象No ratings yet
- Feedback 實驗Document19 pagesFeedback 實驗jimmy wuNo ratings yet
- 第六次实验Document14 pages第六次实验loaad kringNo ratings yet
- ATK-HC05蓝牙串口模块使用说明 (NANO F1) - AN1802Document18 pagesATK-HC05蓝牙串口模块使用说明 (NANO F1) - AN1802JIAYI LIUNo ratings yet
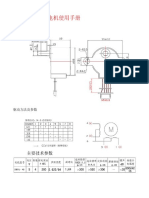
- 24BYJ48 步进电机使用手册Document7 pages24BYJ48 步进电机使用手册cqlNo ratings yet
- 红外发射说明书V1.0 2010-12-25Document12 pages红外发射说明书V1.0 2010-12-25chqfu2002No ratings yet
- 温度的测量与控制Document6 pages温度的测量与控制limengdi0269No ratings yet
- ATK-HC05蓝牙串口模块使用说明 (阿波罗F767) AN1610ADocument17 pagesATK-HC05蓝牙串口模块使用说明 (阿波罗F767) AN1610AJIAYI LIUNo ratings yet
- ATK-HC05蓝牙串口模块使用说明 (探索者F4) AN1408ADocument17 pagesATK-HC05蓝牙串口模块使用说明 (探索者F4) AN1408AJIAYI LIUNo ratings yet
- 第十章 EDA设计优化Document55 pages第十章 EDA设计优化张浩象No ratings yet
- 红外遥控接收模块套件用户手册2010 10 25Document14 pages红外遥控接收模块套件用户手册2010 10 25chqfu2002No ratings yet
- 电子综合设计元宝Document14 pages电子综合设计元宝jyuanbao24No ratings yet
- 实验三报告 罗多福 6317000036Document4 pages实验三报告 罗多福 6317000036RodolfoNo ratings yet
- BeagleBone Black QNX6.6 BSP中IPL的完善 - IT閱讀Document39 pagesBeagleBone Black QNX6.6 BSP中IPL的完善 - IT閱讀devesh.ehrenNo ratings yet
- 轨迹规划Document18 pages轨迹规划刘嘉琦No ratings yet
- 面试常考算法模板 Cheat Sheet V4.1Document38 pages面试常考算法模板 Cheat Sheet V4.1Wayne TangNo ratings yet
- EXP2 ArduinoDocument12 pagesEXP2 Arduino吉視漢堡No ratings yet
- FPGA ExpDocument13 pagesFPGA ExpJoseph HuangNo ratings yet
- Avr Tiny ShleuderDocument5 pagesAvr Tiny ShleuderI-bek Servis ElektroautoNo ratings yet
- Spartan6 VerilogDocument217 pagesSpartan6 VerilogHoai Pham HongNo ratings yet
- 馬達定位與轉速控制最終版Document6 pages馬達定位與轉速控制最終版R dokanNo ratings yet
- Chapter 3Document58 pagesChapter 3陳鍾誠No ratings yet
- 车路协同的自动化小车。。。Document8 pages车路协同的自动化小车。。。Eddie JulieNo ratings yet
- DSP處理器理論與實作筆記Document39 pagesDSP處理器理論與實作筆記維尼熊No ratings yet
- 入门篇答案Document80 pages入门篇答案Salem WangNo ratings yet
- 单周期CPU设计 报告文档Document31 pages单周期CPU设计 报告文档saarchoiNo ratings yet
- 10 03 Ypl 1aDocument13 pages10 03 Ypl 1aCheng Yu WangNo ratings yet
- Chapter06 TCDocument24 pagesChapter06 TCsendra0285No ratings yet
- DSP 28335 IntroDocument57 pagesDSP 28335 IntroSrinivas GudeNo ratings yet
- x Links TableDocument4 pagesx Links TablerudrarudraharaNo ratings yet
- BREP Format DescriptionDocument73 pagesBREP Format Descriptionwindywake3910No ratings yet
- JAVA笔试题Document10 pagesJAVA笔试题宋凯No ratings yet
- Mc Pos Control内容梳理Document7 pagesMc Pos Control内容梳理zack wangNo ratings yet
- Examples Verilog HDLDocument13 pagesExamples Verilog HDLDivya SoundarajanNo ratings yet
- Report For AssignmentDocument11 pagesReport For AssignmentThanh Pham TuanNo ratings yet
- 数字温湿度传感器 DHT11Document11 pages数字温湿度传感器 DHT11j rNo ratings yet
- Chap 08Document33 pagesChap 08ura TohNo ratings yet
- 西门子S7-1200 SCL编程指令手册Document245 pages西门子S7-1200 SCL编程指令手册SeKai100% (1)
- lab6 Segment 7 scan 4digt+dip實驗 exeDocument10 pageslab6 Segment 7 scan 4digt+dip實驗 exe簡佑庭No ratings yet
- Leetcode刷题宝典Document67 pagesLeetcode刷题宝典171757607No ratings yet
- MPU6050中文资料Document28 pagesMPU6050中文资料CUEVA GAMERNo ratings yet
- fx-570 991ES PLUS CKDocument44 pagesfx-570 991ES PLUS CKLige GanNo ratings yet
- 數值分析作業 LU-DecompositionDocument9 pages數值分析作業 LU-DecompositionChiChiChen100% (4)
- Verilog-A 30分钟快速入门教程Document7 pagesVerilog-A 30分钟快速入门教程tonywaiNo ratings yet
- Emacs下的计算器 - calcDocument3 pagesEmacs下的计算器 - calcl7943416No ratings yet
- 5 系統時域響應Document30 pages5 系統時域響應Yi Ying ChangNo ratings yet
- RS485通信基礎理論與STM32測試Document12 pagesRS485通信基礎理論與STM32測試rogerlawNo ratings yet
- FK3U 24MT 6AI2AO使用手册Document12 pagesFK3U 24MT 6AI2AO使用手册Nguyễn Đăng Đức100% (1)
- 实验5 模数和数模转换Document2 pages实验5 模数和数模转换Xiaotian LiuNo ratings yet
- 最强C语言 13 位运算与位域.mdDocument14 pages最强C语言 13 位运算与位域.mdWenqi ShiNo ratings yet
- 水分分析儀795操作手冊Document8 pages水分分析儀795操作手冊陳為祥No ratings yet
- 10425黃正宇自主學習Document11 pages10425黃正宇自主學習joshNo ratings yet
- 未命名文件Document12 pages未命名文件zero zeroNo ratings yet
- 20080701 093 工業自動化實驗上課講義Document23 pages20080701 093 工業自動化實驗上課講義engineeringhandbook100% (1)
- (转帖) CAS智能卡工作原理和破解关键点C源码示范Document16 pages(转帖) CAS智能卡工作原理和破解关键点C源码示范Bin WangNo ratings yet
- Fanuc TRAINING tRINIXDocument38 pagesFanuc TRAINING tRINIXjoeuneloveNo ratings yet
- CiA402伺服使用说明Document20 pagesCiA402伺服使用说明MyKsNo ratings yet
- Manuals Guides Eim Hq Series Pcu i m Manual Chinese Zh Cn 85904Document10 pagesManuals Guides Eim Hq Series Pcu i m Manual Chinese Zh Cn 85904424159728No ratings yet
- Calculator Casio FX 95 500a CNDocument48 pagesCalculator Casio FX 95 500a CNHoratiu SichitiuNo ratings yet
- 19建立小因果 攝類學初階講記 (一) 小理路 倉忠仁波切Document16 pages19建立小因果 攝類學初階講記 (一) 小理路 倉忠仁波切Zhong XiaNo ratings yet
- 6655174a552cfc7961dcadb4e04f5940Document38 pages6655174a552cfc7961dcadb4e04f5940Ha MisNo ratings yet
- Ricoh MP 2555SPDocument40 pagesRicoh MP 2555SPF CNo ratings yet
- 烘焙爱好者的必修课 - 无敌详细的【千层酥皮】做法 - 君之 - 新浪博客Document10 pages烘焙爱好者的必修课 - 无敌详细的【千层酥皮】做法 - 君之 - 新浪博客Jerry Jong Cheng KiatNo ratings yet
- 后妃的荷包:溫惠皇貴太妃及其太監們的營生Document66 pages后妃的荷包:溫惠皇貴太妃及其太監們的營生author20190619No ratings yet