You might also like
- Sucker Rod PresentionDocument46 pagesSucker Rod PresentionWunna Htun100% (3)
- Overview of Drilling Operations MAY 2011 SEMDocument48 pagesOverview of Drilling Operations MAY 2011 SEMdatug100% (1)
- 2. Forsthoffer's Rotating Equipment Handbooks: PumpsFrom Everand2. Forsthoffer's Rotating Equipment Handbooks: PumpsRating: 1 out of 5 stars1/5 (1)
- Pumps and Pumping SystemsDocument59 pagesPumps and Pumping SystemssrinuNo ratings yet
- API Reciprocating Pump TheoryDocument31 pagesAPI Reciprocating Pump TheoryFidezuri Yemen80% (5)
- Calculating Pressure Drop in Chilled Water CircuitsDocument8 pagesCalculating Pressure Drop in Chilled Water Circuitsmohdnazir100% (1)
- Sizing and Specifying Pumps R2Document27 pagesSizing and Specifying Pumps R2royNo ratings yet
- Progressive Cavity Pump (PCP) : Mohamed ElbadriDocument46 pagesProgressive Cavity Pump (PCP) : Mohamed Elbadrimohanned salah100% (3)
- PCP SystemsDocument17 pagesPCP SystemsSaeed AbdNo ratings yet
- PumpDocument34 pagesPumpsoha89100% (1)
- Pump Basics GuideDocument45 pagesPump Basics GuideRoudy J. MhawasNo ratings yet
- ME-458 Turbomachinery: Review of Basic Laws and Design AspectsDocument113 pagesME-458 Turbomachinery: Review of Basic Laws and Design AspectsAneeq Raheem0% (1)
- Rod Pump& PCPDocument17 pagesRod Pump& PCPsouthliNo ratings yet
- Pipeline Rules of Thumb Handbook: A Manual of Quick, Accurate Solutions to Everyday Pipeline Engineering ProblemsFrom EverandPipeline Rules of Thumb Handbook: A Manual of Quick, Accurate Solutions to Everyday Pipeline Engineering ProblemsRating: 4.5 out of 5 stars4.5/5 (10)
- Guidelines For Selection of Turbines, Preliminary Dimensioning and Layout of Surface Hydroelectric Power HousesDocument17 pagesGuidelines For Selection of Turbines, Preliminary Dimensioning and Layout of Surface Hydroelectric Power HousessubasratnaNo ratings yet
- Pumpsandpumpingsystems 150309110148 Conversion Gate01Document58 pagesPumpsandpumpingsystems 150309110148 Conversion Gate01AltairNo ratings yet
- 05 Artificial LiftDocument83 pages05 Artificial LiftPaoloPinard100% (1)
- Pumps StudentsDocument62 pagesPumps StudentsAKHIL JOSEPH100% (1)
- IUTT Oil & Gas Engineering Hazard IdentificationDocument24 pagesIUTT Oil & Gas Engineering Hazard IdentificationMohammed Khaled Al-ThobhaniNo ratings yet
- Structural Analysis of Pipe Rack Structures - FinalDocument205 pagesStructural Analysis of Pipe Rack Structures - FinalJasna Trifković MešićNo ratings yet
- ESP system components and selectionDocument18 pagesESP system components and selectionRizwan FaridNo ratings yet
- Petroleum Production Engineering Ii: Dr. Yasin AlsalehiDocument15 pagesPetroleum Production Engineering Ii: Dr. Yasin AlsalehiMohammed Khaled Al-ThobhaniNo ratings yet
- Petroleum Production Engineering Ii: Dr. Yasin AlsalehiDocument15 pagesPetroleum Production Engineering Ii: Dr. Yasin AlsalehiMohammed Khaled Al-ThobhaniNo ratings yet
- API-610 An OverviewDocument35 pagesAPI-610 An OverviewHarry Ansari100% (2)
- Reciprocating Pump Catalog PDFDocument109 pagesReciprocating Pump Catalog PDFDaniel Erasmo Avellaneda SanchezNo ratings yet
- PW 4100 Part IDocument372 pagesPW 4100 Part IMohamed Adam100% (4)
- Agitated VesselsDocument12 pagesAgitated VesselsFren2008100% (11)
- Well Production ProblemsDocument22 pagesWell Production ProblemsMohammed Khaled Al-ThobhaniNo ratings yet
- L2-Well CirculationDocument33 pagesL2-Well CirculationManish SoniNo ratings yet
- ESP SystemsDocument22 pagesESP SystemsNabila GhaisaniNo ratings yet
- Turbine CW Pipe Status Updated2Document21 pagesTurbine CW Pipe Status Updated2vivekpathak101No ratings yet
- Week #10 Sucker Rod Pump DesignDocument62 pagesWeek #10 Sucker Rod Pump DesignSarasevina AnggraeniNo ratings yet
- Lattive EnergyDocument44 pagesLattive EnergyClarize Soo HooNo ratings yet
- Stan Shiels on centrifugal pumps: Collected articles from 'World Pumps' magazineFrom EverandStan Shiels on centrifugal pumps: Collected articles from 'World Pumps' magazineRating: 5 out of 5 stars5/5 (1)
- PtrE 521 - Lecture 3 - Other Artificial Lift TechnologiesDocument144 pagesPtrE 521 - Lecture 3 - Other Artificial Lift TechnologiesGhoulemEllah Haithem IfreneNo ratings yet
- ESP: Electrical Submersible Pump OverviewDocument17 pagesESP: Electrical Submersible Pump OverviewMurad AliyevNo ratings yet
- Net Positive Suction Head for Rotodynamic Pumps: A Reference GuideFrom EverandNet Positive Suction Head for Rotodynamic Pumps: A Reference GuideRating: 5 out of 5 stars5/5 (1)
- Science 2Document16 pagesScience 2RicalynNo ratings yet
- Rod Pumping PDFDocument21 pagesRod Pumping PDFRizwan FaridNo ratings yet
- Introduction To Oil & Gas An ESO PerspectiveDocument97 pagesIntroduction To Oil & Gas An ESO Perspectiveunknown8787No ratings yet
- Design of ESP InstallationDocument104 pagesDesign of ESP InstallationFakher JemliNo ratings yet
- Research Methodology: Assignments 3: Researches SummariesDocument12 pagesResearch Methodology: Assignments 3: Researches SummariesMohammed Khaled Al-ThobhaniNo ratings yet
- Applied Geomechanics - Class NotesDocument29 pagesApplied Geomechanics - Class NotesShone DavidNo ratings yet
- Specification - Importance of Getting Them RightDocument6 pagesSpecification - Importance of Getting Them RightAnonymous QSfDsVxjZNo ratings yet
- Electrical Submersible Pump (ESP)Document17 pagesElectrical Submersible Pump (ESP)Vi EtNo ratings yet
- Hydraulic Design of Turbine and PumpDocument3 pagesHydraulic Design of Turbine and Pumprupalikuchekar17No ratings yet
- Simulador Qrod v3 para Bombeo MecanicoDocument3 pagesSimulador Qrod v3 para Bombeo MecanicobeymarNo ratings yet
- SPE 112881 Slip Calculation of Rotational Speed of Electrical Submersible Progressive Cavity PumpsDocument9 pagesSPE 112881 Slip Calculation of Rotational Speed of Electrical Submersible Progressive Cavity PumpsDeisy SteffaniaNo ratings yet
- Design of ESP: - "Unlike Positive-Displacement Pumps, ESP Does Not Displace ADocument14 pagesDesign of ESP: - "Unlike Positive-Displacement Pumps, ESP Does Not Displace AMostafa Korttam100% (1)
- Plunger LiftDocument18 pagesPlunger LiftRizwan FaridNo ratings yet
- Iutt-Ppeii 6Document29 pagesIutt-Ppeii 6Mohammed Khaled Al-ThobhaniNo ratings yet
- PUMP HEAD LOSS CALCULATION REVIEWDocument2 pagesPUMP HEAD LOSS CALCULATION REVIEWNaveen NagisettiNo ratings yet
- Artificial Lift Technology Quizzes Questions: Lecture # 1 Sept 3, 2020Document21 pagesArtificial Lift Technology Quizzes Questions: Lecture # 1 Sept 3, 2020Jhon Hery T.R. Harahap100% (2)
- Technical Specifications For The Mobile Oil Hydraulic Power PackDocument4 pagesTechnical Specifications For The Mobile Oil Hydraulic Power PackdebasisNo ratings yet
- Petroleum Production Engineering Ii: Sucker Rod PumpingDocument27 pagesPetroleum Production Engineering Ii: Sucker Rod PumpingMohammed Khaled Al-ThobhaniNo ratings yet
- Wilo PumpcurvesDocument25 pagesWilo PumpcurvesjaysonmalaaNo ratings yet
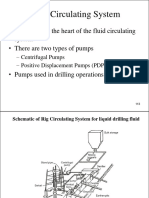
- Fluid Circulating System: - Mud Pump Is The Heart of The Fluid Circulating System - There Are Two Types of PumpsDocument46 pagesFluid Circulating System: - Mud Pump Is The Heart of The Fluid Circulating System - There Are Two Types of PumpsFreddy Mendoza CoronelNo ratings yet
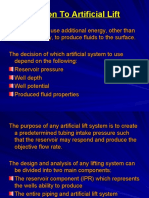
- Artificial Lift IntroductionDocument81 pagesArtificial Lift IntroductionMostafa KorttamNo ratings yet
- CFD Analysis of Mixed Flow Impeller: Neelambika, VeerbhadrappaDocument7 pagesCFD Analysis of Mixed Flow Impeller: Neelambika, VeerbhadrappaAnilNo ratings yet
- 5 Gas Exchange Processes - UpdatedDocument24 pages5 Gas Exchange Processes - UpdatedMuhammad BilalNo ratings yet
- Shenyang Ind. Pump, CCCW Pump - (English)Document10 pagesShenyang Ind. Pump, CCCW Pump - (English)charlitos salesNo ratings yet
- Electrical Submersiblepumps PDFDocument51 pagesElectrical Submersiblepumps PDFRadu Chibzui100% (1)
- Module 12 Assignment QuestionsDocument6 pagesModule 12 Assignment QuestionsNalliz MuthusamyNo ratings yet
- Design and Performance Prediction of Liquid Nitrogen Booster Pump For 80 Kelvin Thermal Shield Using CAE ToolsDocument3 pagesDesign and Performance Prediction of Liquid Nitrogen Booster Pump For 80 Kelvin Thermal Shield Using CAE ToolsKOWSHIK 4310No ratings yet
- History Features and BenefitsDocument31 pagesHistory Features and BenefitsJaime AlmanzaNo ratings yet
- Pump Presentation by SagarDocument48 pagesPump Presentation by SagarSagar NaduvinamaniNo ratings yet
- Hoja de Datos Cummins MotorDocument7 pagesHoja de Datos Cummins Motorelperrote3No ratings yet
- Nasatm 106745Document25 pagesNasatm 106745Jesus PerezNo ratings yet
- Design of a Centrifugal PumpDocument10 pagesDesign of a Centrifugal Pumpharsh rikameNo ratings yet
- Head loss calculation and pump parametersDocument1 pageHead loss calculation and pump parametersNaveen NagisettiNo ratings yet
- Most Used 2264 Words in EnglishDocument46 pagesMost Used 2264 Words in EnglishAhmed SoumirNo ratings yet
- Chapter Two Introduction To Petrolem GeologyDocument36 pagesChapter Two Introduction To Petrolem GeologyMohammed Khaled Al-ThobhaniNo ratings yet
- Well ControlDocument2 pagesWell ControlMohammed Khaled Al-ThobhaniNo ratings yet
- Question One:: Given The Economic Data For An Investment ProposalDocument2 pagesQuestion One:: Given The Economic Data For An Investment ProposalMohammed Khaled Al-ThobhaniNo ratings yet
- ReportDocument1 pageReportMohammed Khaled Al-ThobhaniNo ratings yet
- Iutt-Ppeii 7Document38 pagesIutt-Ppeii 7Mohammed Khaled Al-ThobhaniNo ratings yet
- Question One:: The Cash Flow Profile For An Investment Proposal Is As FollowsDocument2 pagesQuestion One:: The Cash Flow Profile For An Investment Proposal Is As FollowsMohammed Khaled Al-ThobhaniNo ratings yet
- TG Power BiDocument1 pageTG Power BiMohammed Khaled Al-ThobhaniNo ratings yet
- Iutt-Ppeii 6Document29 pagesIutt-Ppeii 6Mohammed Khaled Al-ThobhaniNo ratings yet
- 1OGE Introd2022Document15 pages1OGE Introd2022Mohammed Khaled Al-ThobhaniNo ratings yet
- Iutt-Ppeii 5Document29 pagesIutt-Ppeii 5Mohammed Khaled Al-ThobhaniNo ratings yet
- 2 DFFDocument16 pages2 DFFMohammed Khaled Al-ThobhaniNo ratings yet
- Iutt-Ppeii 8Document26 pagesIutt-Ppeii 8Mohammed Khaled Al-ThobhaniNo ratings yet
- Assignment No.1: Question OneDocument4 pagesAssignment No.1: Question OneMohammed Khaled Al-ThobhaniNo ratings yet
- Crude Oil Classification PropertiesDocument25 pagesCrude Oil Classification PropertiesAbdurabu AL-MontaserNo ratings yet
- Iutt-Ppeii 9Document24 pagesIutt-Ppeii 9Mohammed Khaled Al-ThobhaniNo ratings yet
- Petroleum Production Engineering Ii: Gas Lift MethodDocument33 pagesPetroleum Production Engineering Ii: Gas Lift MethodMohammed Khaled Al-ThobhaniNo ratings yet
- Petroleum Production Engineering Ii: Gas Lift MethodDocument33 pagesPetroleum Production Engineering Ii: Gas Lift MethodMohammed Khaled Al-ThobhaniNo ratings yet
- Wet Gas ReservoirsDocument25 pagesWet Gas ReservoirsMohammed Khaled Al-ThobhaniNo ratings yet
- Research Methodology: 1st SemesterDocument9 pagesResearch Methodology: 1st SemesterMohammed Khaled Al-ThobhaniNo ratings yet
- Petroleum Production Engineering Ii: Sucker Rod PumpingDocument27 pagesPetroleum Production Engineering Ii: Sucker Rod PumpingMohammed Khaled Al-ThobhaniNo ratings yet
- Research Methodology: 1st SemesterDocument11 pagesResearch Methodology: 1st SemesterMohammed Khaled Al-ThobhaniNo ratings yet
- Research Methodology: 1st SemesterDocument9 pagesResearch Methodology: 1st SemesterMohammed Khaled Al-ThobhaniNo ratings yet
- Describe The Hazard(s) : Basic Form For Educational Purposes, Lecturer: Mohammed Al-Sanhani, YEMEN 2021Document2 pagesDescribe The Hazard(s) : Basic Form For Educational Purposes, Lecturer: Mohammed Al-Sanhani, YEMEN 2021Mohammed Khaled Al-ThobhaniNo ratings yet
- Understanding Gas PressureDocument26 pagesUnderstanding Gas Pressurefarrahlaily0% (1)
- Bubbledeck Voided Flat Slab Solutions: June 2008Document91 pagesBubbledeck Voided Flat Slab Solutions: June 2008Gan Chin PhangNo ratings yet
- An SEO-Optimized Title for a Refrigeration and Air Conditioning Exam DocumentDocument3 pagesAn SEO-Optimized Title for a Refrigeration and Air Conditioning Exam DocumentKrishnaNo ratings yet
- Linatex Premium Rubber Spec SheetDocument1 pageLinatex Premium Rubber Spec Sheet_Asylum_No ratings yet
- Sigma Phase Charectaristaion in AISI 316 SSDocument2 pagesSigma Phase Charectaristaion in AISI 316 SSAlMawali76No ratings yet
- 7 Engineering MaterialsDocument58 pages7 Engineering MaterialsSOURABH GANGWARNo ratings yet
- Presentation1 CHEMISTRYDocument11 pagesPresentation1 CHEMISTRYsalmanNo ratings yet
- S9Fe-Ivb-36: Relate Impulse and Momentum To Collision of Objects (E.G, Vehicular Collision) (S9Fe-Ivb-36)Document6 pagesS9Fe-Ivb-36: Relate Impulse and Momentum To Collision of Objects (E.G, Vehicular Collision) (S9Fe-Ivb-36)Lorieley EugenioNo ratings yet
- Cambridge International AS & A Level: Physics 9702/13Document20 pagesCambridge International AS & A Level: Physics 9702/13Cheng ZhangNo ratings yet
- February SonarScope. Overview. Jean-Marie Augustin. Ifremer, Brest, France Acoustics & Seismics DeptDocument37 pagesFebruary SonarScope. Overview. Jean-Marie Augustin. Ifremer, Brest, France Acoustics & Seismics DeptHuu Van TranNo ratings yet
- Dual-Phase Steel - WikipediaDocument3 pagesDual-Phase Steel - WikipediaSandeep PrajapatiNo ratings yet
- Sir M V Pu College 6Document46 pagesSir M V Pu College 6Bhuvan SNo ratings yet
- Remanit: Stainless, Acid and Heat-Resistant Special Steel Grades À La CarteDocument36 pagesRemanit: Stainless, Acid and Heat-Resistant Special Steel Grades À La Cartepipedown456No ratings yet
- Rectangular Hollow Sections Bending Tests Examine Web Slenderness Effect on Rotation CapacityDocument8 pagesRectangular Hollow Sections Bending Tests Examine Web Slenderness Effect on Rotation CapacityKolumbán ZoltánNo ratings yet
- Rf24 70 F28lisusm Im EngDocument16 pagesRf24 70 F28lisusm Im EngDragan MirceaNo ratings yet
- Ref 17Document11 pagesRef 17Gabriel BatistaNo ratings yet
- Module 1Document8 pagesModule 1Jomar LampitokNo ratings yet
- CH1 &CH2 WorksheetDocument9 pagesCH1 &CH2 WorksheetEstifanos KebedeNo ratings yet
- Project Report of Knucle Joint ProjectDocument12 pagesProject Report of Knucle Joint Projecttechy TalksNo ratings yet
- PVC Pipes Product ManualDocument13 pagesPVC Pipes Product ManualMurali SomasundharamNo ratings yet
- Gas Dynamics-Rayleigh FlowDocument26 pagesGas Dynamics-Rayleigh FlowRahul100% (4)
- Ingersoll RandDocument12 pagesIngersoll RandBultaNo ratings yet
- G11 Practical 8 (B)Document22 pagesG11 Practical 8 (B)CHAN KOON SEANNo ratings yet
- CE 264 - PS4 - NCJajurieDocument28 pagesCE 264 - PS4 - NCJajurieRanji JajurieNo ratings yet