You might also like
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Academic Calendar of 2021-2022Document3 pagesAcademic Calendar of 2021-2022Bin Christian0% (1)
- 3 - Automatic Wall Painting Machine PDFDocument41 pages3 - Automatic Wall Painting Machine PDFaalekhNo ratings yet
- Case ReichardDocument23 pagesCase ReichardDesiSelviaNo ratings yet
- Scomsuehenterwriter Trang Bìa LótDocument6 pagesScomsuehenterwriter Trang Bìa Lóthoangpham.31211025804No ratings yet
- Jason Cavanaugh Design PortfolioDocument37 pagesJason Cavanaugh Design Portfolioapi-341626402No ratings yet
- Pool Scrubber Tank OfferDocument10 pagesPool Scrubber Tank OfferRanchojiNo ratings yet
- 2020 MSM Discussion ProblemsDocument48 pages2020 MSM Discussion ProblemsSai PrabhathNo ratings yet
- Omni Catolog 2005Document116 pagesOmni Catolog 2005Tuan SsvcNo ratings yet
- نسخة امتحان ال operation PDFDocument3 pagesنسخة امتحان ال operation PDFAhmed HadadNo ratings yet
- Exercise No. 1: TM 706-Quantitative ManagementDocument4 pagesExercise No. 1: TM 706-Quantitative ManagementMark Allen ArmenionNo ratings yet
- CH2 Linear ProgrammingDocument30 pagesCH2 Linear ProgrammingTASNIM MUSANo ratings yet
- LTE - SON Field Tests - Huawei - Final Report - V1 0Document66 pagesLTE - SON Field Tests - Huawei - Final Report - V1 0Ani HovhannisyanNo ratings yet
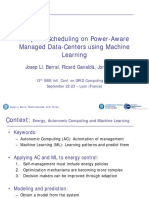
- Adaptive Scheduling On Power-Aware Managed Data-Centers Using Machine LearningDocument13 pagesAdaptive Scheduling On Power-Aware Managed Data-Centers Using Machine LearningKevin MondragonNo ratings yet
- ACFrOgAF6A4eF2xqNpd7pAP ibgp0EhpV3oVEhHszorpeaiOs qfwrYDN-ZwBJep5H-l777YMea49MKwRADiWCdcayVaDYZ0rHuE9QnAT3vKaxSSOSIOCkTgxMxVaxXt8i HjuY-Zvzut9abKHRXDocument8 pagesACFrOgAF6A4eF2xqNpd7pAP ibgp0EhpV3oVEhHszorpeaiOs qfwrYDN-ZwBJep5H-l777YMea49MKwRADiWCdcayVaDYZ0rHuE9QnAT3vKaxSSOSIOCkTgxMxVaxXt8i HjuY-Zvzut9abKHRXKshitiz BhardwajNo ratings yet
- Time: 2.5 Hours Maximum Marks: 50 InstructionsDocument13 pagesTime: 2.5 Hours Maximum Marks: 50 InstructionsSuyash SarafNo ratings yet
- CBA - 2019 - Assignment - II PDFDocument5 pagesCBA - 2019 - Assignment - II PDFSandeep Singh0% (2)
- OM QuestionsDocument5 pagesOM QuestionsUNik ROnz OFFICIALNo ratings yet
- 4Document17 pages4M SiddiqNo ratings yet
- Learning CurvesDocument15 pagesLearning CurvesAliya RaheelNo ratings yet
- Perfect CompetitionDocument26 pagesPerfect CompetitionNaman AroraNo ratings yet
- Blake Jaw Crusher: Hardened SteelDocument5 pagesBlake Jaw Crusher: Hardened SteelUsamaNo ratings yet
- Topic 4 Output and Cost AnalysisDocument32 pagesTopic 4 Output and Cost AnalysisKendricks OnyangoNo ratings yet
- Chapter4 Theory of ProductionDocument25 pagesChapter4 Theory of ProductionGee JoeNo ratings yet
- Open Ended Lab ReportDocument16 pagesOpen Ended Lab ReportNilesh ElninoNo ratings yet
- IEEE - Paper Very InterestedDocument4 pagesIEEE - Paper Very InterestedWhatnextNo ratings yet
- Solutions To Sample Problems From Chapter 1Document3 pagesSolutions To Sample Problems From Chapter 1Marco Arango BuriticaNo ratings yet
- Operations Research (BM7002)Document19 pagesOperations Research (BM7002)thamarai selvamNo ratings yet
- 05 10 Kunci Sukses Optimasi ModelDocument39 pages05 10 Kunci Sukses Optimasi ModelKelas KNo ratings yet
- Jbptunikompp GDL Hermanssoe 25652 8 Kuliah1Document24 pagesJbptunikompp GDL Hermanssoe 25652 8 Kuliah1Daemon7No ratings yet
- Calculate ST Sheet:10 Model: ANT A51-Efficiency (90%)Document17 pagesCalculate ST Sheet:10 Model: ANT A51-Efficiency (90%)Minh NguyenNo ratings yet
- Individual Report. MD - Najmul Islam, 201901019.Document12 pagesIndividual Report. MD - Najmul Islam, 201901019.Najmul IslamNo ratings yet
- Contract DocumentDocument51 pagesContract DocumentEngineeri TadiyosNo ratings yet
- Prod Theory WREcoDocument45 pagesProd Theory WREcoChandrashekhar BhagatNo ratings yet
- SMMS-7 ProductOverview Ver2Document113 pagesSMMS-7 ProductOverview Ver2Tín Nguyễn ThànhNo ratings yet
- Ls Dyna ReporrrrDocument3 pagesLs Dyna ReporrrrAshutosh GargNo ratings yet
- PR 5 Anrek LP PDFDocument12 pagesPR 5 Anrek LP PDFTriHadinata100% (1)
- Theory of ProductionDocument35 pagesTheory of ProductionVivek GudeNo ratings yet
- Operations ResearchDocument4 pagesOperations ResearchRishiNo ratings yet
- BMS College of Engineering, Bangalore-560019: December 2016 Semester End Main ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: December 2016 Semester End Main ExaminationsahmadNo ratings yet
- BBA OM PreboardDocument2 pagesBBA OM PreboardJabed MansuriNo ratings yet
- Raj Singh Be Mba CaseDocument8 pagesRaj Singh Be Mba CaseAJAY KUMAR THAKURNo ratings yet
- Excel A1 Session10 Mathematical Statistical TextDocument36 pagesExcel A1 Session10 Mathematical Statistical TextNikunj MolasariaNo ratings yet
- Management Programme Term-End Examination December, 2OO8: Maximum Marks: 700Document6 pagesManagement Programme Term-End Examination December, 2OO8: Maximum Marks: 700Amod KanhereNo ratings yet
- Product Catalog ENGLISHDocument4 pagesProduct Catalog ENGLISHIgnatius AgustaNo ratings yet
- Solution Manual CODDocument115 pagesSolution Manual CODZia JoeNo ratings yet
- Lecture 05Document18 pagesLecture 05Zhu KNo ratings yet
- Problems and Solutions: Ans: ProductivityDocument5 pagesProblems and Solutions: Ans: ProductivityJames MunyenyoNo ratings yet
- Sunny-Cp and The Minizinc ChallengeDocument14 pagesSunny-Cp and The Minizinc ChallengeMaurizioNo ratings yet
- Tybms - orDocument6 pagesTybms - orSahil ChaudhariNo ratings yet
- 5 Earned ValueDocument68 pages5 Earned ValueRahul sardanaNo ratings yet
- Suneeth ReviewDocument68 pagesSuneeth ReviewPranayteja.G gottipamulaNo ratings yet
- Swingarm and Rear Suspension Design in An ElecDocument129 pagesSwingarm and Rear Suspension Design in An ElecAhmad Fajar HumaidiNo ratings yet
- Learning Curves: Dr. Everette S. Gardner, JRDocument15 pagesLearning Curves: Dr. Everette S. Gardner, JRdamanNo ratings yet
- Assignment 1Document6 pagesAssignment 1Thinkcomplex TalksimpleNo ratings yet
- Activity Event DurationDocument17 pagesActivity Event DurationBasharat SaigalNo ratings yet
- Panel Data Models Using Stata: SourceDocument22 pagesPanel Data Models Using Stata: SourceDavid TerrerosNo ratings yet
- MMBM 44A - I Gusti Bagus Dharma MahardikaDocument4 pagesMMBM 44A - I Gusti Bagus Dharma Mahardikadharma mahardikaNo ratings yet
- BallMill 2021chb1040Document8 pagesBallMill 2021chb1040bawankar152prathameshNo ratings yet
- Book 1Document4 pagesBook 1Science FictionNo ratings yet
- Perspectives On The Use of English As A Business Lingua Franca in Hong KongDocument26 pagesPerspectives On The Use of English As A Business Lingua Franca in Hong KongBin ChristianNo ratings yet
- ELC6011 - Student Info Sheet - 2021-22Document6 pagesELC6011 - Student Info Sheet - 2021-22Bin ChristianNo ratings yet
- The Hong Kong Polytechnic University Subject Description FormDocument4 pagesThe Hong Kong Polytechnic University Subject Description FormBin ChristianNo ratings yet
- Exercise1 QDocument2 pagesExercise1 QBin ChristianNo ratings yet
- Assignment 1 ADocument3 pagesAssignment 1 ABin ChristianNo ratings yet
- ELC6001 - Session 4 - 2022 - SsDocument13 pagesELC6001 - Session 4 - 2022 - SsBin ChristianNo ratings yet
- RPG Pre Departurenotes 20210722Document6 pagesRPG Pre Departurenotes 20210722Bin ChristianNo ratings yet
- Gurobi TrainingDocument84 pagesGurobi TrainingBin ChristianNo ratings yet
- Student Q&A For LTADocument7 pagesStudent Q&A For LTABin ChristianNo ratings yet
- Learning and Teaching: 30 August 2021Document3 pagesLearning and Teaching: 30 August 2021Bin ChristianNo ratings yet
- Gurobi Optimizer Quick Start Guide (9.1)Document114 pagesGurobi Optimizer Quick Start Guide (9.1)Bin ChristianNo ratings yet
- Gurobi Optimizer Reference Mannual (9.1)Document980 pagesGurobi Optimizer Reference Mannual (9.1)Bin ChristianNo ratings yet
- Gurobi Optimizer Remote Services Manual (9.1)Document151 pagesGurobi Optimizer Remote Services Manual (9.1)Bin ChristianNo ratings yet