You might also like
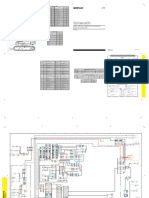
- 303C CR Mini Hydraulic Excavator Electrical System: Bxt1-UpDocument2 pages303C CR Mini Hydraulic Excavator Electrical System: Bxt1-UpVictor Rodrigo Cortes Yañez100% (1)
- Robotic Trolley For Material HandlingDocument46 pagesRobotic Trolley For Material HandlingSaggy ChhataniNo ratings yet
- Permanent Magnet Synchronous MachineDocument8 pagesPermanent Magnet Synchronous MachineWilli Apupalo NaranjoNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Permanent Magnet DC MotorDocument3 pagesPermanent Magnet DC MotorMuhammad Arie HendroNo ratings yet
- Design Perspective of Construction of Synchronous MachinesDocument40 pagesDesign Perspective of Construction of Synchronous MachinesJosephNo ratings yet
- Direct Current (DC) Motors: OperationDocument6 pagesDirect Current (DC) Motors: OperationckyprianouNo ratings yet
- Classification of Electric Motors: Electrical Motors Basic ComponentsDocument89 pagesClassification of Electric Motors: Electrical Motors Basic ComponentsSarada Sankar DasNo ratings yet
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentraviNo ratings yet
- SEM Subject Impt Two Marks Question With AnswersDocument8 pagesSEM Subject Impt Two Marks Question With AnswersvlkumashankardeekshithNo ratings yet
- Lec # 26 Brushless DC MotorDocument12 pagesLec # 26 Brushless DC MotorBuriro HayatNo ratings yet
- Lec 6Document20 pagesLec 6abdo lokaNo ratings yet
- Classification of MotorSDocument17 pagesClassification of MotorSHumaid Shaikh50% (2)
- PMBLDCDocument25 pagesPMBLDCYash DeoliaNo ratings yet
- Induction Motors Fed by PWM MV7000 Converters Enhance Electric Propulsion PerformanceDocument9 pagesInduction Motors Fed by PWM MV7000 Converters Enhance Electric Propulsion Performancemlkz_01No ratings yet
- DCMotors DesignGuideDocument12 pagesDCMotors DesignGuidenaruto256No ratings yet
- Applying PMDC Motors: Product FocusDocument4 pagesApplying PMDC Motors: Product FocusAniesh MahajanNo ratings yet
- Brushed Direct-Current Motors: 5.1 Review of Motor TheoryDocument32 pagesBrushed Direct-Current Motors: 5.1 Review of Motor TheoryEvren SoydanNo ratings yet
- Ee6703 Sem Eee Viist Au Unit Ivbldc Lecture NotesDocument25 pagesEe6703 Sem Eee Viist Au Unit Ivbldc Lecture NotesDEEPANo ratings yet
- Speed Control of DC MotorDocument31 pagesSpeed Control of DC Motorabhinav. alpheus651997No ratings yet
- نظري معمل الاتDocument7 pagesنظري معمل الاتAhmed HazemNo ratings yet
- The Advantages and Hazards of DC MotorsDocument6 pagesThe Advantages and Hazards of DC MotorsGalco IndustrialNo ratings yet
- Module 2 - DC Motor DrivesDocument61 pagesModule 2 - DC Motor DrivesMohammad Amirul ShafiqNo ratings yet
- Full Paper P-031Document9 pagesFull Paper P-031SUBRATA BISWASNo ratings yet
- (VT Ranganathan) Course Notes On Electric DrivesDocument119 pages(VT Ranganathan) Course Notes On Electric DrivesPowerranger2.0No ratings yet
- Tema1 - 4 - Otras Maquinas - 2020 - 21Document82 pagesTema1 - 4 - Otras Maquinas - 2020 - 21airtonNo ratings yet
- DW TechTip Brushless Servo SystemsDocument14 pagesDW TechTip Brushless Servo SystemsgubiliNo ratings yet
- Permanent Magnet DC MotorDocument4 pagesPermanent Magnet DC MotorPulkit ChaudhariNo ratings yet
- A Quick Overview On Rotatory Brush and Brushless DC MotorsDocument4 pagesA Quick Overview On Rotatory Brush and Brushless DC Motorsmazza234No ratings yet
- Permanent Magnet MotorsDocument36 pagesPermanent Magnet MotorskkarthiksNo ratings yet
- Permanent Magnet DC MotorDocument3 pagesPermanent Magnet DC Motorayie94_fox8792No ratings yet
- Brushless DC Electric MotorDocument8 pagesBrushless DC Electric MotorankitNo ratings yet
- Unit III Permanent Magnet Brushless DC MotorsDocument3 pagesUnit III Permanent Magnet Brushless DC MotorsanbuelectricalNo ratings yet
- Chapter 6 Brushless Motors and ControllersDocument21 pagesChapter 6 Brushless Motors and ControllersFaiz Ahadan Rijalis SirajNo ratings yet
- Brushless DC Electric MotorDocument8 pagesBrushless DC Electric MotorAngel VelasquezNo ratings yet
- Design of Synchronous MachinesDocument17 pagesDesign of Synchronous MachinesNiteshNarukaNo ratings yet
- Unit 4Document128 pagesUnit 4kkarthiksNo ratings yet
- Module 3 - 2&16marksDocument25 pagesModule 3 - 2&16markskesavantNo ratings yet
- Brushless MotorDocument44 pagesBrushless MotorabduljasNo ratings yet
- Unit VDocument32 pagesUnit Vrahulmeenameenarahul26No ratings yet
- Permanent Magnet DC MotorsDocument25 pagesPermanent Magnet DC MotorsShreyansh Vishwakarma100% (1)
- BLDC MotorsDocument45 pagesBLDC Motorswicked_not_meNo ratings yet
- Doubly Fed Induction Generator For Wind Energy Conversion Systems With Integrated Active Filter CapabilitiesDocument42 pagesDoubly Fed Induction Generator For Wind Energy Conversion Systems With Integrated Active Filter CapabilitiesKesava VarmaNo ratings yet
- Understanding Variable Speed Drives (Part 1)Document4 pagesUnderstanding Variable Speed Drives (Part 1)geav25653855No ratings yet
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- Types of Motor Motor TypesDocument17 pagesTypes of Motor Motor TypesGokulThalaNo ratings yet
- PMBLDC Motor DriveDocument55 pagesPMBLDC Motor DriveSushant SinghNo ratings yet
- Electrical Technology (EEA2020) : Home Assignment: Applications of DC Machines and Permanent Magnet DC MotorDocument7 pagesElectrical Technology (EEA2020) : Home Assignment: Applications of DC Machines and Permanent Magnet DC MotorQuazi Warish AhmadNo ratings yet
- Motor of VTOL AircraftDocument22 pagesMotor of VTOL Aircraftvimarsh joshiNo ratings yet
- Motor of VTOL Aircraft PDFDocument22 pagesMotor of VTOL Aircraft PDFvimarsh joshiNo ratings yet
- Spical Electrical Machines 2 MarksDocument20 pagesSpical Electrical Machines 2 Markskarthicgroup100% (1)
- Crown Counterbalance Forklift SC 6000 Parts Service ManualDocument22 pagesCrown Counterbalance Forklift SC 6000 Parts Service Manualjohnathanfoster080802obr96% (26)
- PMBLDC Anp 2020Document61 pagesPMBLDC Anp 2020RishabhNo ratings yet
- Universal Motor: Wound Motor Where The Stator's Field Coils AreDocument8 pagesUniversal Motor: Wound Motor Where The Stator's Field Coils AreItho MisaNo ratings yet
- AlernatorDocument47 pagesAlernatorMayank SrivastavaNo ratings yet
- Doubly-Fed Electric Machine - WikipediaDocument5 pagesDoubly-Fed Electric Machine - WikipediavineeshNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose MotorsHari ReddyNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Physics ChallengeDocument2 pagesPhysics ChallengeKelvinNo ratings yet
- CS42448 Audio DAC ADCDocument66 pagesCS42448 Audio DAC ADCQuinta EspNo ratings yet
- Phoenix Uk5-HesiDocument11 pagesPhoenix Uk5-HesiHeri MunirNo ratings yet
- GK 3000 Variable Frequency Drive User ManualDocument137 pagesGK 3000 Variable Frequency Drive User ManualAnonymous Z3C8JRlNo ratings yet
- RPi LCD User ManualDocument6 pagesRPi LCD User ManualAravinda KumarNo ratings yet
- Radar TutorialDocument15 pagesRadar TutorialrkbinddrdoNo ratings yet
- CXD5602GG Technical ManualDocument52 pagesCXD5602GG Technical ManualAlex SmirnoffNo ratings yet
- BTY87 PhilipsDocument8 pagesBTY87 PhilipsmatheuzalexsanderNo ratings yet
- Valvula Proporcional REXROTHDocument16 pagesValvula Proporcional REXROTHfabio ferreira de almeida100% (1)
- Hysteresis and Eddy Current Losses PDFDocument2 pagesHysteresis and Eddy Current Losses PDFVenkata SubramanianNo ratings yet
- ZPL Zbi2 PM en PDFDocument1,340 pagesZPL Zbi2 PM en PDFDuban PedrazaNo ratings yet
- The ZF 4WG-200 Control System Testing Point: Overseas TrainingDocument19 pagesThe ZF 4WG-200 Control System Testing Point: Overseas TrainingAbdellah100% (1)
- Data SheetDocument6 pagesData SheetBudi JoyoNo ratings yet
- Attachment For RFA-ELEC-001Document51 pagesAttachment For RFA-ELEC-001sie kingNo ratings yet
- GMT Marking Codes (Ver2)Document45 pagesGMT Marking Codes (Ver2)David SimonNo ratings yet
- FM LiftSpecDocument182 pagesFM LiftSpecMostafa MohmmedNo ratings yet
- UNIX Course Ware Ver 1Document154 pagesUNIX Course Ware Ver 1api-3699150No ratings yet
- Instrumentation 172Document172 pagesInstrumentation 172adarsh snija100% (1)
- TimeProvider 5000 IEEE 1588 Grandmaster PDFDocument2 pagesTimeProvider 5000 IEEE 1588 Grandmaster PDFahmedmidanyNo ratings yet
- UP SHINE SPEC of T812W900 O High Lumen T8 Glass Tube Light PDFDocument6 pagesUP SHINE SPEC of T812W900 O High Lumen T8 Glass Tube Light PDFAndrez LopezNo ratings yet
- Fronius Energy PackageDocument140 pagesFronius Energy Packagegoangagoanga99No ratings yet
- mp1000 g2Document93 pagesmp1000 g2Ezequiel MelendresNo ratings yet
- Ee Induction Motors HandoutsDocument2 pagesEe Induction Motors HandoutsJevan SoberanoNo ratings yet
- Ma 722 01 en 00Document196 pagesMa 722 01 en 00Hector Martinez100% (1)
- CD20-SFA (115VAC) Sampler Drive: Clif MockDocument14 pagesCD20-SFA (115VAC) Sampler Drive: Clif Mocktsaqova MuhammadNo ratings yet
- RH c779 SB ManualDocument10 pagesRH c779 SB ManualRamius HamdaniNo ratings yet
- 51 52 03 41 hc900 Io Modules Jan23Document44 pages51 52 03 41 hc900 Io Modules Jan23sarah.elfishawyNo ratings yet
- What Xilinx Xc6slx45-2fgg484i FpgaDocument14 pagesWhat Xilinx Xc6slx45-2fgg484i FpgajackNo ratings yet