You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2024 HRPIWSProgramDocument120 pages2024 HRPIWSProgramJhan Saavedra100% (1)
- 1Q - 2 Review of Adding PolynomialsDocument30 pages1Q - 2 Review of Adding PolynomialsJerkeia RespicioNo ratings yet
- An Invitation To Live Together: Making The "Complex We"Document8 pagesAn Invitation To Live Together: Making The "Complex We"EmiliaNo ratings yet
- Languagecert Expert C1 Level 2 International Esol (Speaking) Practice Paper 3Document7 pagesLanguagecert Expert C1 Level 2 International Esol (Speaking) Practice Paper 3maria muela bravoNo ratings yet
- Simulation and Analysis of Highspeed Modular Flywheel Energy Storage Systems Using MATLAB SimulinkDocument6 pagesSimulation and Analysis of Highspeed Modular Flywheel Energy Storage Systems Using MATLAB Simulinkgunasekaran sNo ratings yet
- Development of High FieDocument30 pagesDevelopment of High Fiegunasekaran sNo ratings yet
- Sciencedirect: 2. Description and Characteristics of Im and SMDocument11 pagesSciencedirect: 2. Description and Characteristics of Im and SMgunasekaran sNo ratings yet
- A Comprehensive Review of Flywheel Energy Storage Systen TechnologyDocument14 pagesA Comprehensive Review of Flywheel Energy Storage Systen Technologygunasekaran sNo ratings yet
- Ingles Vii According To The Text, Answer Questions 1 To 4: Earth'S TemperaturesDocument6 pagesIngles Vii According To The Text, Answer Questions 1 To 4: Earth'S TemperaturesjenniferNo ratings yet
- Chemical Safety ProgramDocument22 pagesChemical Safety ProgramGerard M. EncarnacionNo ratings yet
- How Can You Learn English Alone - Self-Study Plan! - EnglishClass101Document6 pagesHow Can You Learn English Alone - Self-Study Plan! - EnglishClass101Neila ArteagaNo ratings yet
- UCS Prediction Using Drilling ParametersDocument90 pagesUCS Prediction Using Drilling Parameterscvlpla55No ratings yet
- IB Geography Note Unit 1-3Document7 pagesIB Geography Note Unit 1-3areenaNo ratings yet
- FUDS Video GuideDocument2 pagesFUDS Video GuidejoelbsassonNo ratings yet
- Fluk 337Document2 pagesFluk 337Jared PérezNo ratings yet
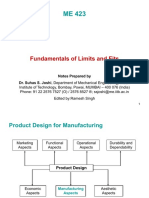
- Fundamentals of Limits and Fits: Notes Prepared by Dr. Suhas S. Joshi, Department of Mechanical Engineering, IndianDocument35 pagesFundamentals of Limits and Fits: Notes Prepared by Dr. Suhas S. Joshi, Department of Mechanical Engineering, Indianyair Enrique Romero OspinoNo ratings yet
- X210620 - Profiency in Working in A Team Environment - EditedDocument6 pagesX210620 - Profiency in Working in A Team Environment - EditedMartha WanjiruNo ratings yet
- Rda Science Most and Least Grade 4Document3 pagesRda Science Most and Least Grade 4Guia Marie Diaz BriginoNo ratings yet
- Radiology Director in Midwest USA Resume Craig DavisDocument3 pagesRadiology Director in Midwest USA Resume Craig DavisCraigDavis2No ratings yet
- Japan and IndiaDocument2 pagesJapan and IndiaLimeylen IsNoobNo ratings yet
- Mastering The Art of ApproachingDocument2 pagesMastering The Art of ApproachingElvin MitraNo ratings yet
- Lesson IV: Characteristics of Competency Based TrainingDocument10 pagesLesson IV: Characteristics of Competency Based Trainingنجشو گحوشNo ratings yet
- 1987-Cohen-jellium model见解Document9 pages1987-Cohen-jellium model见解1592162022No ratings yet
- Statistical Problem Solving LPDocument2 pagesStatistical Problem Solving LPPio Cucicilò FinaNo ratings yet
- Enfield - 2006 - Review of The Book Agrammar of SemelaiDocument5 pagesEnfield - 2006 - Review of The Book Agrammar of SemelaiFabiana LeiteNo ratings yet
- "Full Coverage": Bounds: (Edexcel GCSE June2006-6H Q19aii)Document11 pages"Full Coverage": Bounds: (Edexcel GCSE June2006-6H Q19aii)mrudulaNo ratings yet
- 13 DPWH: Central OfficeDocument1 page13 DPWH: Central OfficeJohn Wilmiths TubbanNo ratings yet
- SOLIDWORKS Syllabus For 6 Full DayDocument1 pageSOLIDWORKS Syllabus For 6 Full DayJayaram R S [MECH]No ratings yet
- Spc-16 Accurad Spec Sheet BDocument2 pagesSpc-16 Accurad Spec Sheet BAPOSTOLOS BENTSISNo ratings yet
- Rice Straw-Based CompostingDocument9 pagesRice Straw-Based CompostingcelsribeiroNo ratings yet
- English Course SyllabusDocument2 pagesEnglish Course SyllabusSrikanthNo ratings yet
- BLM 1-3 Section 1.1 PracticDocument1 pageBLM 1-3 Section 1.1 PracticRenier Palma CruzNo ratings yet
- Classroom Management For Young Learners - Modul 3Document2 pagesClassroom Management For Young Learners - Modul 3wahyu agustinaNo ratings yet
- 13.47.1 UnlockedDocument2 pages13.47.1 UnlockedJoseVillanuevaNo ratings yet