You might also like
- Journal 11Document6 pagesJournal 11Eccker RekcceNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- A Theory of Generic InterpretersDocument14 pagesA Theory of Generic InterpretersAnderson VasquesNo ratings yet
- EE-232: Signals and Systems Lab 4: Introduction To Complex ExponentialsDocument18 pagesEE-232: Signals and Systems Lab 4: Introduction To Complex ExponentialsMuhammad Uzair KhanNo ratings yet
- Complex Signal ProcessingDocument12 pagesComplex Signal ProcessingDavid TynanNo ratings yet
- DSP Important MaterialDocument209 pagesDSP Important Materialssabinayaa12No ratings yet
- Sig and Sys Lab 3 Ahsan Sial (287400)Document11 pagesSig and Sys Lab 3 Ahsan Sial (287400)GameBoys AdvancedNo ratings yet
- Lab 1 ReportDocument7 pagesLab 1 ReportShawn Sagar100% (1)
- TR (Zak) : Xo+z,' Z + ZDocument5 pagesTR (Zak) : Xo+z,' Z + ZSara WigginsNo ratings yet
- Interleave-Division Multiple Access in High Rate ApplicationsDocument4 pagesInterleave-Division Multiple Access in High Rate ApplicationsRoopali AgarwalNo ratings yet
- DSP Complete ManualDocument59 pagesDSP Complete ManualAnonymous Q6WJ2JUNo ratings yet
- PDF File For Oled Full ReportDocument31 pagesPDF File For Oled Full ReportAakash AggarwalNo ratings yet
- An FPGA Based Microblaze Soft Core Architecture For 2D-LiftingDocument8 pagesAn FPGA Based Microblaze Soft Core Architecture For 2D-LiftingpriyabinduNo ratings yet
- An FPGA-Based Digital Modulation Signal Generator With Fading Channel EmulationDocument5 pagesAn FPGA-Based Digital Modulation Signal Generator With Fading Channel Emulationsenao71263No ratings yet
- Creating Semantic Representations of DiagramsDocument16 pagesCreating Semantic Representations of DiagramsCheco DarwinNo ratings yet
- Lab 4Document8 pagesLab 4hamzaNo ratings yet
- Factor Graphs and The Sum-Product AlgorithmDocument22 pagesFactor Graphs and The Sum-Product AlgorithmR Gowri PrasadNo ratings yet
- Simple Technique For Root Locus PlottingDocument9 pagesSimple Technique For Root Locus PlottingHernández VaNo ratings yet
- Inverse Engineering A Simple Real Time ProgramDocument32 pagesInverse Engineering A Simple Real Time ProgrammartinwardNo ratings yet
- DLX ProcessorDocument4 pagesDLX ProcessorgalaxystarNo ratings yet
- Hybrid Control of Load Simulator For Unmanned Aerial Vehicle Based On Wavelet NetworksDocument5 pagesHybrid Control of Load Simulator For Unmanned Aerial Vehicle Based On Wavelet NetworksPhuc Pham XuanNo ratings yet
- Implementation of Resonant Controllers and Filters in Fixed-Point ArithmeticDocument9 pagesImplementation of Resonant Controllers and Filters in Fixed-Point Arithmeticmipanduro7224No ratings yet
- Implementation of The 2-D Wavelet Transform IntoDocument9 pagesImplementation of The 2-D Wavelet Transform IntoribozoNo ratings yet
- System Programming (BTHU-301A) : Bachelor of TechnologyDocument22 pagesSystem Programming (BTHU-301A) : Bachelor of TechnologyShefali BajajNo ratings yet
- Elisa Franco, Domitilla Del Vecchio and Richard M. Murray - Design of Insulating Devices For in Vitro Synthetic CircuitsDocument6 pagesElisa Franco, Domitilla Del Vecchio and Richard M. Murray - Design of Insulating Devices For in Vitro Synthetic CircuitsCogsmsNo ratings yet
- Simulation, Stability of The H-Bridge Low Power Dissipation For PhotovoltaicDocument8 pagesSimulation, Stability of The H-Bridge Low Power Dissipation For PhotovoltaicVinsen Teubun LetsoinNo ratings yet
- PR Dren Gu We SCH Wiegel SohnDocument43 pagesPR Dren Gu We SCH Wiegel SohnssfofoNo ratings yet
- Lab 02: An Experiment With Tuning Fork Synthesis of SinusoidalDocument6 pagesLab 02: An Experiment With Tuning Fork Synthesis of Sinusoidal100a100aNo ratings yet
- Control-Systems Lab (080-096)Document17 pagesControl-Systems Lab (080-096)Gangula Praneeth ReddyNo ratings yet
- 8.advances in Mechanical Engineering 2015 LopesDocument8 pages8.advances in Mechanical Engineering 2015 LopesvamshiNo ratings yet
- FPGA Adaptive CTL LawsDocument6 pagesFPGA Adaptive CTL Lawsabdou_scribdNo ratings yet
- Periodic Signals: 1. Application GoalDocument10 pagesPeriodic Signals: 1. Application GoalGabi MaziluNo ratings yet
- FinalDocument78 pagesFinalsameera0627No ratings yet
- ECE 4600 - Introduction To Systems and Signals: Take Home Lab /#: .... 6.....Document14 pagesECE 4600 - Introduction To Systems and Signals: Take Home Lab /#: .... 6.....Juju JantonNo ratings yet
- Bubacz Adamski XX 1 s2.0 S1474667017301908 MainDocument6 pagesBubacz Adamski XX 1 s2.0 S1474667017301908 MainddddNo ratings yet
- A Matlab-Based Tool For Power System Dynamics Analysis: A Comparison With PSS/EDocument5 pagesA Matlab-Based Tool For Power System Dynamics Analysis: A Comparison With PSS/ELuis Alonso Aguirre LopezNo ratings yet
- Parallel Algorithms For Logic SynthesisDocument7 pagesParallel Algorithms For Logic SynthesisKruthi SubramanyaNo ratings yet
- Lecture1-Signals & SystemsDocument20 pagesLecture1-Signals & SystemsWaqas Akram Gondal100% (1)
- 1 s2.0 S1063520321000907 MainDocument26 pages1 s2.0 S1063520321000907 MainGeyson MaquineNo ratings yet
- An FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure CommunicationsDocument5 pagesAn FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure Communicationslaz_chikhi1574No ratings yet
- The Echo State Approach To Analysing and TrainingDocument47 pagesThe Echo State Approach To Analysing and TrainingGeraud Russel Goune ChenguiNo ratings yet
- Sampling and Sampled-Data SystemsDocument20 pagesSampling and Sampled-Data Systemsvineetverma0698No ratings yet
- Impulse Response:: δ (t) δ (n) h (t) h (n)Document3 pagesImpulse Response:: δ (t) δ (n) h (t) h (n)nazmulNo ratings yet
- Basic Op of CryptoDocument13 pagesBasic Op of CryptoSaifullah Khalid100% (1)
- Sampling and Sampled-Data SystemsDocument20 pagesSampling and Sampled-Data SystemsAmit KumarNo ratings yet
- Diagrammatic Derivation of Gradient Algorithms For Neural NetworksDocument23 pagesDiagrammatic Derivation of Gradient Algorithms For Neural NetworksjoseNo ratings yet
- A Formal Specification of The JQ Language: Michael FärberDocument27 pagesA Formal Specification of The JQ Language: Michael FärberOBXONo ratings yet
- Fine-Tuning and Masked Lan-Guage Models: 11.1 Bidirectional Transformer EncodersDocument22 pagesFine-Tuning and Masked Lan-Guage Models: 11.1 Bidirectional Transformer Encoderscagla.cengizNo ratings yet
- User-Defined Functions of MATLAB For Modeling Linear Periodically-Time-Variable CircuitsDocument5 pagesUser-Defined Functions of MATLAB For Modeling Linear Periodically-Time-Variable CircuitsОльга ГолованьNo ratings yet
- EE325 Signals & Systems II Lab #1 Filtering Report Due: M1B: Tuesday, January 25 3:45pm M1D: Thursday, January 27 3:45pm Via GradescopeDocument4 pagesEE325 Signals & Systems II Lab #1 Filtering Report Due: M1B: Tuesday, January 25 3:45pm M1D: Thursday, January 27 3:45pm Via GradescopeJuan R. Gastelum IINo ratings yet
- High Speed ECG Image Compression Using Modified SPIHTDocument5 pagesHigh Speed ECG Image Compression Using Modified SPIHTsp40694No ratings yet
- ConvolutionDocument66 pagesConvolutionRavi Matthews100% (1)
- Zeno Hybrid SystemsDocument17 pagesZeno Hybrid SystemsLe Huy HoangNo ratings yet
- Wavelet Networks For Nonlinear System ModelingDocument9 pagesWavelet Networks For Nonlinear System ModelingMarcos GarcíaNo ratings yet
- Svu Dsp-Lab - Manual-2Document54 pagesSvu Dsp-Lab - Manual-2GurusreenuNo ratings yet
- DSP Lab Manual: 5 Semester Electronics and Communication Subject Code: 18ecl57 2020-21Document58 pagesDSP Lab Manual: 5 Semester Electronics and Communication Subject Code: 18ecl57 2020-21Axis AlexNo ratings yet
- Representation of Linear Digital Networks: 52 MinutesDocument6 pagesRepresentation of Linear Digital Networks: 52 Minutesapi-127299018No ratings yet
- TestsizeDocument33 pagesTestsizeNguyen TrungNo ratings yet
- 32 Bit Digital Optical ComputerDocument4 pages32 Bit Digital Optical ComputerVariNo ratings yet
- AMD Radeon Pro w7800 DatasheetDocument2 pagesAMD Radeon Pro w7800 DatasheetPeter PanNo ratings yet
- An Implementation of Lola-2 or Translating From Lola To VerilogDocument7 pagesAn Implementation of Lola-2 or Translating From Lola To VerilogurhenNo ratings yet
- 1376 Runtime Adaptable Vliw ProcessorsDocument188 pages1376 Runtime Adaptable Vliw ProcessorsPeter PanNo ratings yet
- AMD EPYC 9004 MZ33-AR0 Datasheet v1.1Document1 pageAMD EPYC 9004 MZ33-AR0 Datasheet v1.1Peter PanNo ratings yet
- Integrated 16-Channel Transmit and Receive Beamforming ASICDocument6 pagesIntegrated 16-Channel Transmit and Receive Beamforming ASICPeter PanNo ratings yet
- 1376 Runtime Adaptable Vliw ProcessorsDocument188 pages1376 Runtime Adaptable Vliw ProcessorsPeter PanNo ratings yet
- 16 Channel 100 V, 2/ 4 A, 5/3 Level With RTZ, T/R Switch, High-Speed Ultrasound Pulser With Integrated Transmit BeamformerDocument4 pages16 Channel 100 V, 2/ 4 A, 5/3 Level With RTZ, T/R Switch, High-Speed Ultrasound Pulser With Integrated Transmit BeamformerPeter PanNo ratings yet
- VideoCoreIV AG100 RDocument111 pagesVideoCoreIV AG100 RPablo RodriguezNo ratings yet
- Apollo3 Blue MCU Data Sheet v0 12 1 RZ9AkgoDocument919 pagesApollo3 Blue MCU Data Sheet v0 12 1 RZ9AkgoPeter PanNo ratings yet
- M1 Explainer 070Document350 pagesM1 Explainer 070danielNo ratings yet
- Awoken Installation and InstructionsDocument18 pagesAwoken Installation and InstructionsLars HöckerNo ratings yet
- Siemens Simatic S 7 300 - 400 - Configuring Hardware With STEP 7Document164 pagesSiemens Simatic S 7 300 - 400 - Configuring Hardware With STEP 7duniaengineering8666100% (17)
- WCF Advanced Activity DevelopmentDocument30 pagesWCF Advanced Activity Developmentrajanikant_singhNo ratings yet
- Grade 9 (SPTVE) CSS (1) Diagnostic TestDocument6 pagesGrade 9 (SPTVE) CSS (1) Diagnostic TestGODSLEE SUACILLONo ratings yet
- Manual Service Xerox Phaser - 5500 - BK - 2 PDFDocument470 pagesManual Service Xerox Phaser - 5500 - BK - 2 PDFCornel SusanuNo ratings yet
- Protim RDocument12 pagesProtim RGomes2020No ratings yet
- Floyd Chapter 5 Model AnswersDocument35 pagesFloyd Chapter 5 Model Answersjnax101No ratings yet
- History of ComputersDocument6 pagesHistory of ComputersGie Marie Francisco UmaliNo ratings yet
- Surface Mount Fuses FundamentalsDocument28 pagesSurface Mount Fuses FundamentalsfwklNo ratings yet
- CENG 365 Microprocessor UENR Unit 1Document65 pagesCENG 365 Microprocessor UENR Unit 1Blessing CheremehNo ratings yet
- Data Management Systems, AnesthesiaDocument25 pagesData Management Systems, AnesthesiaAbu OdaiNo ratings yet
- CAM Master Training - CRDocument326 pagesCAM Master Training - CRNicu GeeNo ratings yet
- Me2255 Syllabus & Book ReferenceDocument5 pagesMe2255 Syllabus & Book ReferenceBibin LeeNo ratings yet
- Language 2000: User's Guide and Technical InformationDocument9 pagesLanguage 2000: User's Guide and Technical Informationamtzva@No ratings yet
- Poec Question Bank 2Document6 pagesPoec Question Bank 2knitbonsaiNo ratings yet
- Penta Modular August 2022Document2 pagesPenta Modular August 2022parzNo ratings yet
- Siemens TNMS (Technical Descriptions)Document41 pagesSiemens TNMS (Technical Descriptions)kashif.amir100% (4)
- دستورات cmdDocument2 pagesدستورات cmdmerza11No ratings yet
- MestReNova 2DDocument4 pagesMestReNova 2DMauricio Acelas M.No ratings yet
- Ax40 Enus Ins 02Document28 pagesAx40 Enus Ins 02shyguy81No ratings yet
- QCS-2010 Section 21 Part 22 Earthing and BondingDocument5 pagesQCS-2010 Section 21 Part 22 Earthing and Bondingbryanpastor106No ratings yet
- Ganjil 2020Document17 pagesGanjil 2020Nanang Qosim AlmuhandisNo ratings yet
- Installation Manual US01B.M8 / US04B.M8: Ultrasonic Sensor For Web Guiding SystemsDocument12 pagesInstallation Manual US01B.M8 / US04B.M8: Ultrasonic Sensor For Web Guiding SystemsAsif JeeNo ratings yet
- Making Your Own Discone AntennaDocument172 pagesMaking Your Own Discone AntennaTayyab Hassan100% (3)
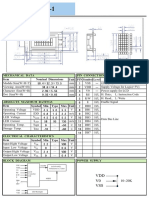
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDocument1 pageV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNo ratings yet
- Manual de Partes Clark EPX20-32Document60 pagesManual de Partes Clark EPX20-32colive1No ratings yet
- CssDocument9 pagesCssSheng Suelto CarpenteroNo ratings yet
- Shifting From Software To Hardware For Network SecurityDocument10 pagesShifting From Software To Hardware For Network SecurityJulio JordanNo ratings yet
- 3516 Setting Pre ArranqueDocument36 pages3516 Setting Pre ArranqueGabriel Paco Luna100% (1)
- EDS - NDrive ManualDocument115 pagesEDS - NDrive Manuallfba_16No ratings yet
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)From EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Rating: 5 out of 5 stars5/5 (1)
- Clean Code: A Handbook of Agile Software CraftsmanshipFrom EverandClean Code: A Handbook of Agile Software CraftsmanshipRating: 5 out of 5 stars5/5 (13)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- Once Upon an Algorithm: How Stories Explain ComputingFrom EverandOnce Upon an Algorithm: How Stories Explain ComputingRating: 4 out of 5 stars4/5 (43)
- Software Development: BCS Level 4 Certificate in IT study guideFrom EverandSoftware Development: BCS Level 4 Certificate in IT study guideRating: 3.5 out of 5 stars3.5/5 (2)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerFrom EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerRating: 5 out of 5 stars5/5 (1)
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!From EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Rating: 4.5 out of 5 stars4.5/5 (2)
- GAMEDEV: 10 Steps to Making Your First Game SuccessfulFrom EverandGAMEDEV: 10 Steps to Making Your First Game SuccessfulRating: 4.5 out of 5 stars4.5/5 (12)
- HTML, CSS, and JavaScript Mobile Development For DummiesFrom EverandHTML, CSS, and JavaScript Mobile Development For DummiesRating: 4 out of 5 stars4/5 (10)
- Mastering JavaScript: The Complete Guide to JavaScript MasteryFrom EverandMastering JavaScript: The Complete Guide to JavaScript MasteryRating: 5 out of 5 stars5/5 (1)
- The Ultimate Python Programming Guide For Beginner To IntermediateFrom EverandThe Ultimate Python Programming Guide For Beginner To IntermediateRating: 4.5 out of 5 stars4.5/5 (3)
- Coding for Kids Ages 9-15: Simple HTML, CSS and JavaScript lessons to get you started with Programming from ScratchFrom EverandCoding for Kids Ages 9-15: Simple HTML, CSS and JavaScript lessons to get you started with Programming from ScratchRating: 4.5 out of 5 stars4.5/5 (4)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerFrom EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerRating: 4.5 out of 5 stars4.5/5 (44)
- Narrative Design for Indies: Getting StartedFrom EverandNarrative Design for Indies: Getting StartedRating: 4.5 out of 5 stars4.5/5 (5)
- Blockchain: The complete guide to understanding Blockchain Technology for beginners in record timeFrom EverandBlockchain: The complete guide to understanding Blockchain Technology for beginners in record timeRating: 4.5 out of 5 stars4.5/5 (34)
- Django Unleashed: Building Web Applications with Python's FrameworkFrom EverandDjango Unleashed: Building Web Applications with Python's FrameworkNo ratings yet
- Python Programming : How to Code Python Fast In Just 24 Hours With 7 Simple StepsFrom EverandPython Programming : How to Code Python Fast In Just 24 Hours With 7 Simple StepsRating: 3.5 out of 5 stars3.5/5 (54)