You might also like
- Opening The Third EyeDocument13 pagesOpening The Third EyekakamacgregorNo ratings yet
- Outline of Lecture 8: Structural DynamicsDocument49 pagesOutline of Lecture 8: Structural DynamicsAnish PaiNo ratings yet
- 033 - Flight Planning Monitoring - QuestionsDocument126 pages033 - Flight Planning Monitoring - QuestionsEASA ATPL Question Bank100% (4)
- On The Dynamics of Washing MachinesDocument2 pagesOn The Dynamics of Washing MachineslayrakpaxNo ratings yet
- BTL Marketing CompanyDocument30 pagesBTL Marketing Companypradip_kumarNo ratings yet
- What Is An InfographicDocument4 pagesWhat Is An InfographicAryaaaNo ratings yet
- CHAPTER I KyleDocument13 pagesCHAPTER I KyleCresiel Pontijon100% (1)
- A Curved-Beam Bistable Mechanism: Jin Qiu, Jeffrey H. Lang, Fellow, IEEE, and Alexander H. Slocum, Member, IEEEDocument10 pagesA Curved-Beam Bistable Mechanism: Jin Qiu, Jeffrey H. Lang, Fellow, IEEE, and Alexander H. Slocum, Member, IEEEM.J.W.100% (1)
- GlobalDocument24 pagesGloballaleye_olumideNo ratings yet
- Design and Implementation of Hotel Management SystemDocument36 pagesDesign and Implementation of Hotel Management Systemaziz primbetov100% (2)
- Apiwat Etal AVA00Document2 pagesApiwat Etal AVA00Manel MontesinosNo ratings yet
- System Dynamics (24.509) : VII. Introduction To The Design and Simulation of Controlled SystemsDocument4 pagesSystem Dynamics (24.509) : VII. Introduction To The Design and Simulation of Controlled SystemsJuanPabloQuisbertMartínez100% (1)
- Structural Analysis of A Wind Turbine and Its Drive Train Using The Flexible Multibody Simulation TechniqueDocument16 pagesStructural Analysis of A Wind Turbine and Its Drive Train Using The Flexible Multibody Simulation TechniquerachitmatNo ratings yet
- Multi Plane Balancing of A Rotating Machine Using Run-Down DataDocument6 pagesMulti Plane Balancing of A Rotating Machine Using Run-Down Datapeach5No ratings yet
- Analysis of A Non-Proportionally Damped Building Structure With Added Viscoelastic DampersDocument8 pagesAnalysis of A Non-Proportionally Damped Building Structure With Added Viscoelastic DampersSudan ShresthaNo ratings yet
- Torque Roll AxisDocument30 pagesTorque Roll AxisRakesh NagraniNo ratings yet
- Design and Analysis of A Compliant Parallel Pan-Tilt Platform 2015Document12 pagesDesign and Analysis of A Compliant Parallel Pan-Tilt Platform 2015newkid2202No ratings yet
- Chapter 8Document28 pagesChapter 8HemantNo ratings yet
- Some Experimental and Simulation Results On The Dynamic Behaviour of Spur and Helical Geared Transmissions With Journal BearingsDocument27 pagesSome Experimental and Simulation Results On The Dynamic Behaviour of Spur and Helical Geared Transmissions With Journal BearingsBhukya VenkateshNo ratings yet
- Workspace Boundaries of A Planar Tensegrity Mechanism by ArsenaultDocument17 pagesWorkspace Boundaries of A Planar Tensegrity Mechanism by ArsenaultTensegrity WikiNo ratings yet
- Influence of The Supporting Structure Dynamic Behaviour On The Shaft Vibration of A Real Rotating MachineDocument10 pagesInfluence of The Supporting Structure Dynamic Behaviour On The Shaft Vibration of A Real Rotating MachineTran HienNo ratings yet
- Magnetic Equivalent Circuit ModelingDocument12 pagesMagnetic Equivalent Circuit ModelingJavad Rahmany FardNo ratings yet
- Naf Ems 2013 RotorDocument12 pagesNaf Ems 2013 Rotorletter_ashish4444No ratings yet
- Performance Benefits in Passive Vehicle Suspensions Employing InertersDocument6 pagesPerformance Benefits in Passive Vehicle Suspensions Employing Inertersนิติพล ไชยวงศ์No ratings yet
- Finite Element Modelling Ball Screw Feed Drive SystemsDocument4 pagesFinite Element Modelling Ball Screw Feed Drive SystemsnNo ratings yet
- Multilink 5 LinksDocument18 pagesMultilink 5 LinkstotyNo ratings yet
- Design of Resonant Controller For Four-Leg Matrix Converter Feeding Non Linear LoadsDocument10 pagesDesign of Resonant Controller For Four-Leg Matrix Converter Feeding Non Linear LoadsInternational Organization of Scientific Research (IOSR)No ratings yet
- Analytical Methods of Decoupling PDFDocument30 pagesAnalytical Methods of Decoupling PDFAdhi1971No ratings yet
- The Evaluation of Rotor Imbalance in Flexibly Mounted MachinesDocument13 pagesThe Evaluation of Rotor Imbalance in Flexibly Mounted MachinesCésar TapiaNo ratings yet
- Modeling of Wind Turbine Gearbox Mounting: Morten Haastrup Michael R. Hansen Morten K. EbbesenDocument9 pagesModeling of Wind Turbine Gearbox Mounting: Morten Haastrup Michael R. Hansen Morten K. Ebbesendiyako dadkhahNo ratings yet
- A Three-Dimensional Finite-Strain Rod Model. Part Ii: Computational AspectsDocument37 pagesA Three-Dimensional Finite-Strain Rod Model. Part Ii: Computational AspectsAmenNo ratings yet
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument9 pagesComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDaniel CamargoNo ratings yet
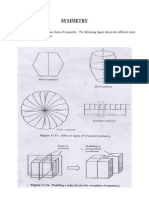
- Symmetry FullDocument9 pagesSymmetry FullRagav VeeraNo ratings yet
- 5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsDocument11 pages5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsnguyenngocbanNo ratings yet
- Convex Optimization For Spring Design in Series Elastic Actuators From Theory To PracticeDocument6 pagesConvex Optimization For Spring Design in Series Elastic Actuators From Theory To PracticeYuan HUANGNo ratings yet
- Numerical Simulation of Turbulent Flow Through A Francis Turbine RunnerDocument6 pagesNumerical Simulation of Turbulent Flow Through A Francis Turbine RunnerAngel CerriteñoNo ratings yet
- Modeling and Parameter Identification For Active Lubricated Hydrostatic Bearing-Rotor SystemDocument11 pagesModeling and Parameter Identification For Active Lubricated Hydrostatic Bearing-Rotor SystemhaceneNo ratings yet
- Flexible RotorDocument22 pagesFlexible RotormghgolNo ratings yet
- Karan Minor ProjectDocument25 pagesKaran Minor ProjectBrijamohan JhaNo ratings yet
- Ijtpp 04 00008 PDFDocument18 pagesIjtpp 04 00008 PDFdanea haitham abd alrahmanNo ratings yet
- 2009 The Effect of Codimension-Two Bifurcations On The Global - PiiroinenDocument19 pages2009 The Effect of Codimension-Two Bifurcations On The Global - PiiroinenFabian GarciaNo ratings yet
- A Novel Quaternion Integration Approach For Describing The Behaviour of Non-Spherical ParticlesDocument19 pagesA Novel Quaternion Integration Approach For Describing The Behaviour of Non-Spherical ParticlesperosuttoneNo ratings yet
- Novel Compliant Wiper MechanismDocument10 pagesNovel Compliant Wiper MechanismMarko DjekicNo ratings yet
- Implications of Vertical Mass Modeling Errors On 2D Dynamic Structural AnalysisDocument19 pagesImplications of Vertical Mass Modeling Errors On 2D Dynamic Structural AnalysisEd SixzeroeightNo ratings yet
- Balancing Reciprocating MassesDocument6 pagesBalancing Reciprocating Masseshamish888No ratings yet
- Modeling and Identification of A Single Link Flexible Arm With A Passive Gravity CompensationDocument7 pagesModeling and Identification of A Single Link Flexible Arm With A Passive Gravity CompensationHermogensNo ratings yet
- Effect of Modified Bouc-Wen Model Parameters On Dynamic Hysteresis of Magnetorheological DampersDocument16 pagesEffect of Modified Bouc-Wen Model Parameters On Dynamic Hysteresis of Magnetorheological DampersWael GalalNo ratings yet
- Inverted PendulumDocument9 pagesInverted PendulumMahmoud Samir MahmoudNo ratings yet
- Aerodynamic Analysis Involving Moving Parts With XFlowDocument12 pagesAerodynamic Analysis Involving Moving Parts With XFlowDmitry GrenishenNo ratings yet
- Contribution To The Definition of The Torsional Stiffness of The Crankshaft of A Diesel Engine Used in Heavy-Duty VehiclesDocument11 pagesContribution To The Definition of The Torsional Stiffness of The Crankshaft of A Diesel Engine Used in Heavy-Duty VehiclesTushar SharmaNo ratings yet
- A Design Approach For Gravity Compensators Using Planar Four-Bar Mechanism and Linear SpringsDocument30 pagesA Design Approach For Gravity Compensators Using Planar Four-Bar Mechanism and Linear Springsadissu K/MNo ratings yet
- Technical Report: SpringsDocument20 pagesTechnical Report: Springskrishbalu17No ratings yet
- ME 3507: Theory of Machines: BalancingDocument60 pagesME 3507: Theory of Machines: Balancingusama riazNo ratings yet
- Constraints On Motion: Degrees Ot Freedom: Answers To Revl8lon ExerciseDocument9 pagesConstraints On Motion: Degrees Ot Freedom: Answers To Revl8lon ExerciseAnonymous LU3Dz3TKtVNo ratings yet
- Influence of Thrust Bearings in Lateral VibrationDocument13 pagesInfluence of Thrust Bearings in Lateral VibrationHuang XiaodianNo ratings yet
- Compression Load Transmission in Screw Compressors: Journal of Sound and Vibration (1997) 207 (5), 671-691Document21 pagesCompression Load Transmission in Screw Compressors: Journal of Sound and Vibration (1997) 207 (5), 671-691saekNo ratings yet
- Ismb 7Document6 pagesIsmb 7Kadhigo YusufNo ratings yet
- Chapter 20: Analysis of Nonlinear ResponseDocument26 pagesChapter 20: Analysis of Nonlinear ResponseBhind NijjarNo ratings yet
- Dynamic Analysis of Gear and Rack Transmission SysDocument6 pagesDynamic Analysis of Gear and Rack Transmission SysEverest Engineering Lead R&DNo ratings yet
- Investigation of Wind Farm On Power System Voltage Stability Based On Bifurcation TheoryDocument4 pagesInvestigation of Wind Farm On Power System Voltage Stability Based On Bifurcation TheoryArmando MaloneNo ratings yet
- Non-Parametric Models For Magneto-Rheological DampersDocument18 pagesNon-Parametric Models For Magneto-Rheological DampersUmanath R PoojaryNo ratings yet
- Navigation Equations in The Earth Centered Earth Fixed FrameDocument17 pagesNavigation Equations in The Earth Centered Earth Fixed FrametangphamvanNo ratings yet
- Compensation Methods For Network Solutions by Optimally Ordered Triangular FactorizationDocument5 pagesCompensation Methods For Network Solutions by Optimally Ordered Triangular FactorizationjasonkinNo ratings yet
- Week 9 Equivalent Mass and Moment of Inertia Text of Audio RecordingDocument5 pagesWeek 9 Equivalent Mass and Moment of Inertia Text of Audio RecordingFindlay MathesonNo ratings yet
- Application of Engineering Models To Predict Wake Deflection Due To A Tilted Wind TurbineDocument6 pagesApplication of Engineering Models To Predict Wake Deflection Due To A Tilted Wind TurbineSrinivas GunturNo ratings yet
- Khan 2021Document8 pagesKhan 2021Amirmohamad AzimiNo ratings yet
- Material Datasheet Industryline 17-4ph en ScreenDocument5 pagesMaterial Datasheet Industryline 17-4ph en ScreenAmirmohamad AzimiNo ratings yet
- Impact of Multiphysics Simulation AA2 2020 V14 Ansys AdvantageDocument68 pagesImpact of Multiphysics Simulation AA2 2020 V14 Ansys AdvantageAmirmohamad AzimiNo ratings yet
- Entropy: Misalignment Fault Diagnosis of DFWT Based On IEMD Energy Entropy and PSO-SVMDocument15 pagesEntropy: Misalignment Fault Diagnosis of DFWT Based On IEMD Energy Entropy and PSO-SVMAmirmohamad AzimiNo ratings yet
- Finite Element Analysis of Misaligned Rotors On Oil-Film BearingsDocument17 pagesFinite Element Analysis of Misaligned Rotors On Oil-Film BearingsAmirmohamad AzimiNo ratings yet
- Mechanical Systems and Signal Processing: Tejas H. Patel, Ashish K. DarpeDocument17 pagesMechanical Systems and Signal Processing: Tejas H. Patel, Ashish K. DarpeAmirmohamad AzimiNo ratings yet
- Dynamics of Nelson RotorDocument8 pagesDynamics of Nelson RotorsowgNo ratings yet
- Vibration Characteristics of A Rotor-Bearing System Caused Due To Coupling Misalignment - A ReviewDocument10 pagesVibration Characteristics of A Rotor-Bearing System Caused Due To Coupling Misalignment - A ReviewAmirmohamad AzimiNo ratings yet
- FoodhallDocument3 pagesFoodhallswopnilrohatgiNo ratings yet
- ECDIS Presentation Library 4Document16 pagesECDIS Presentation Library 4Orlando QuevedoNo ratings yet
- Genstat Release 10.3de (Pc/Windows 7) 28 May 2012 06:35:59Document6 pagesGenstat Release 10.3de (Pc/Windows 7) 28 May 2012 06:35:59Anna Nur HidayatiNo ratings yet
- Aruba 8325 Switch SeriesDocument51 pagesAruba 8325 Switch SeriesgmtrlzNo ratings yet
- Journal of Power Sources: Binyu Xiong, Jiyun Zhao, Zhongbao Wei, Maria Skyllas-KazacosDocument12 pagesJournal of Power Sources: Binyu Xiong, Jiyun Zhao, Zhongbao Wei, Maria Skyllas-KazacosjayashreeNo ratings yet
- Making Sense of The Future of Libraries: Dan Dorner, Jennifer Campbell-Meier and Iva SetoDocument14 pagesMaking Sense of The Future of Libraries: Dan Dorner, Jennifer Campbell-Meier and Iva SetoBiblioteca IICENo ratings yet
- APPSC GR I Initial Key Paper IIDocument52 pagesAPPSC GR I Initial Key Paper IIdarimaduguNo ratings yet
- I. Ifugao and Its TribeDocument8 pagesI. Ifugao and Its TribeGerard EscandaNo ratings yet
- 127 Bba-204Document3 pages127 Bba-204Ghanshyam SharmaNo ratings yet
- Simple Fat Burning Exercises at Home or GymDocument6 pagesSimple Fat Burning Exercises at Home or GymShirleyNo ratings yet
- Lesson Plan Cot1Document9 pagesLesson Plan Cot1Paglinawan Al KimNo ratings yet
- Meyer and Zack KM CycleDocument16 pagesMeyer and Zack KM Cyclemohdasriomar84No ratings yet
- CAKUTDocument50 pagesCAKUTsantosh subediNo ratings yet
- MY-SDK-10000-EE-005 - Method Statement For Concrete Pole Installation - GVB Rev1Document7 pagesMY-SDK-10000-EE-005 - Method Statement For Concrete Pole Installation - GVB Rev1Seeths NairNo ratings yet
- Ingredients EnsaymadaDocument3 pagesIngredients Ensaymadajessie OcsNo ratings yet
- Put Them Into A Big Bowl. Serve The Salad in Small Bowls. Squeeze Some Lemon Juice. Cut The Fruits Into Small Pieces. Wash The Fruits. Mix The FruitsDocument2 pagesPut Them Into A Big Bowl. Serve The Salad in Small Bowls. Squeeze Some Lemon Juice. Cut The Fruits Into Small Pieces. Wash The Fruits. Mix The FruitsNithya SweetieNo ratings yet
- 0apageo Catalogue Uk 2022Document144 pages0apageo Catalogue Uk 2022Kouassi JaurèsNo ratings yet
- LS3954A LS3954 LS3955 LS3956 LS3958: Linear Integrated SystemsDocument3 pagesLS3954A LS3954 LS3955 LS3956 LS3958: Linear Integrated SystemsJCMNo ratings yet
- Mechanical Vibration and Oscillation in Transmission LinesDocument27 pagesMechanical Vibration and Oscillation in Transmission LinesChhatrapal SinghNo ratings yet
- Aggregate Production PlanningDocument5 pagesAggregate Production PlanningSarbani SahuNo ratings yet
- Filtomat M300Document4 pagesFiltomat M300Sasa Jadrovski100% (1)
- List of Every National School Walkout PDF LinksDocument373 pagesList of Every National School Walkout PDF LinksStephanie Dube Dwilson100% (1)
- Defence QuestionnaireDocument2 pagesDefence QuestionnaireSumitt SinghNo ratings yet