You might also like
- ADA326842 (Prediction of Aerodynamic Drag)Document107 pagesADA326842 (Prediction of Aerodynamic Drag)vagito100% (1)
- Aircraft Performance, Stability and Control With Experiments in FlightDocument8 pagesAircraft Performance, Stability and Control With Experiments in FlightMohammad AlthafNo ratings yet
- Inspector General Greg White-Complaint of John B. ThompsonDocument6 pagesInspector General Greg White-Complaint of John B. ThompsonNeil GillespieNo ratings yet
- Gate Aerospace 2007 (Propulsion Questions)Document4 pagesGate Aerospace 2007 (Propulsion Questions)kkonthenet100% (1)
- CFD Analysis of A High Altitude Long Endurance Uav WingDocument9 pagesCFD Analysis of A High Altitude Long Endurance Uav WingRomizNo ratings yet
- Stanza Living WP EmailDocument16 pagesStanza Living WP Emailshabeenakhanam01No ratings yet
- Ellie Malmin Makeup 101 E Book PDFDocument18 pagesEllie Malmin Makeup 101 E Book PDFDoreenNo ratings yet
- Joya Vs PCGGDocument3 pagesJoya Vs PCGGKatherine AplacadorNo ratings yet
- Risk Assessment Modeling in Aviation Safety ManagementDocument7 pagesRisk Assessment Modeling in Aviation Safety ManagementAnnisa RakhmawatiNo ratings yet
- 5940G Service Manual - V202148 FCSDocument382 pages5940G Service Manual - V202148 FCSRonald MarticioNo ratings yet
- Stability and Control of Airplanes and HelicoptersFrom EverandStability and Control of Airplanes and HelicoptersRating: 5 out of 5 stars5/5 (1)
- Aerodynamic Data Generation TechniquesDocument21 pagesAerodynamic Data Generation TechniquesThiago BoaventuraNo ratings yet
- Sales & Marketing Plan - CompletedDocument20 pagesSales & Marketing Plan - CompletedAna Nurul LailaNo ratings yet
- Types of Sensor and Their ApplicationDocument6 pagesTypes of Sensor and Their Applicationpogisimpatiko0% (1)
- Coefficients of Propeller-Hull Interaction in Inland Waterway Vessels PDFDocument8 pagesCoefficients of Propeller-Hull Interaction in Inland Waterway Vessels PDFKalipada SenNo ratings yet
- Aerodynamic Optimization of WingsDocument21 pagesAerodynamic Optimization of WingsMarcos SoarNo ratings yet
- 24 - Spouses Jayme V ApostolDocument2 pages24 - Spouses Jayme V ApostolAngelo Raphael B. DelmundoNo ratings yet
- Navion 19720011369 - 1972011369Document63 pagesNavion 19720011369 - 1972011369Bill GalbraithNo ratings yet
- Siemens SW Analysis and Simulation in Aircraft Structure Certification WP - tcm27-65939Document7 pagesSiemens SW Analysis and Simulation in Aircraft Structure Certification WP - tcm27-65939Calin ComanNo ratings yet
- Aerodynamic Performance of Propellers 1245Document11 pagesAerodynamic Performance of Propellers 1245mikewenNo ratings yet
- App 4a NLR 13 2008 646Document187 pagesApp 4a NLR 13 2008 646Mr. ButcherNo ratings yet
- Geometry Build Up CorrelationsDocument17 pagesGeometry Build Up CorrelationsSidi Moulaye SidneNo ratings yet
- The Study On Dispatch Reliability Prediction Model of Civil AircraftDocument5 pagesThe Study On Dispatch Reliability Prediction Model of Civil Aircraft4587560No ratings yet
- 2007 Re Mre Deliverable d2 4 Ripcord IserestDocument28 pages2007 Re Mre Deliverable d2 4 Ripcord IserestEdwin JimenezNo ratings yet
- Monte Carlo SimulationDocument7 pagesMonte Carlo SimulationandreNo ratings yet
- Spacial Distribution of Risk and Reliabiality in Slopes PDFDocument4 pagesSpacial Distribution of Risk and Reliabiality in Slopes PDFVageeshaS.MathadaNo ratings yet
- Design of A Scaled RPV For Investigation of Gust Response of Joined-Wing SesnorcraftDocument14 pagesDesign of A Scaled RPV For Investigation of Gust Response of Joined-Wing SesnorcraftTestNo ratings yet
- Nanyang Technological University: School of Mechanical and Aerospace EngineeringDocument12 pagesNanyang Technological University: School of Mechanical and Aerospace Engineeringsnick_the_vickNo ratings yet
- Drone Design Optimization With Swarm Networking Using Particle Swarm AlgorithmDocument9 pagesDrone Design Optimization With Swarm Networking Using Particle Swarm AlgorithmIJRASETPublicationsNo ratings yet
- AE 524 Midterm Module 02.1Document10 pagesAE 524 Midterm Module 02.1Jan Cedrick CervantesNo ratings yet
- Small Craft Power PredictionDocument32 pagesSmall Craft Power PredictionSilvioEgMeloNo ratings yet
- Jjmie: Design Analysis and Modeling of A General Aviation AircraftDocument9 pagesJjmie: Design Analysis and Modeling of A General Aviation AircraftDario ForestiereNo ratings yet
- Overview and Summary of The Second AIAA High Lift Prediction Workshop (Invited)Document37 pagesOverview and Summary of The Second AIAA High Lift Prediction Workshop (Invited)Jose Taco Jr.No ratings yet
- Pang 2019 IOP Conf. Ser. Mater. Sci. Eng. 563 052058Document7 pagesPang 2019 IOP Conf. Ser. Mater. Sci. Eng. 563 052058yuan huangNo ratings yet
- Flight MechanicsDocument3 pagesFlight MechanicsQwer QwerNo ratings yet
- A Pilot's Assessment of Helicopter Handling-Quality Factors Common To Both Agility and Instrument Flying TasksDocument21 pagesA Pilot's Assessment of Helicopter Handling-Quality Factors Common To Both Agility and Instrument Flying TasksAbdul Rashid TajarNo ratings yet
- OMAE2012-83586: Safety Factors For Fatigue Analysis of Flexible Pipes Based On Structural ReliabilityDocument6 pagesOMAE2012-83586: Safety Factors For Fatigue Analysis of Flexible Pipes Based On Structural ReliabilityBruno ChagasNo ratings yet
- Illness Aircraft JournalDocument76 pagesIllness Aircraft JournalListiyani IsmailNo ratings yet
- Applied Sciences: A Method For Estimating Aircraft Vertical Acceleration and Eddy Dissipation Rate in Turbulent FlightDocument24 pagesApplied Sciences: A Method For Estimating Aircraft Vertical Acceleration and Eddy Dissipation Rate in Turbulent FlightDonNo ratings yet
- Correlation of Ground Friction Measurements Aircraft Braking Friction Calculated Flight Data RecordersDocument17 pagesCorrelation of Ground Friction Measurements Aircraft Braking Friction Calculated Flight Data RecordersAna AnaNo ratings yet
- Bayesian Updating of Damage Size Probabilities For Aircraft Structural Life-Cycle ManagementDocument43 pagesBayesian Updating of Damage Size Probabilities For Aircraft Structural Life-Cycle ManagementSimões TiagoNo ratings yet
- Assignment Brief - QCF BTECDocument4 pagesAssignment Brief - QCF BTECMohammed RizwanNo ratings yet
- Using CFD Software To Calculate Hydrodynamic CoefficientsDocument7 pagesUsing CFD Software To Calculate Hydrodynamic CoefficientsfauzanhanifNo ratings yet
- Need of Different Flapping Styles For Different FL PDFDocument11 pagesNeed of Different Flapping Styles For Different FL PDFAllwyn AssaultNo ratings yet
- Failure Analysis Methods in UAV ApplicationsDocument10 pagesFailure Analysis Methods in UAV ApplicationschrisNo ratings yet
- Airspace Complexity Measutment - An Air Traffic Control SimulationDocument10 pagesAirspace Complexity Measutment - An Air Traffic Control Simulationodic2002No ratings yet
- The Assessment Method For Multi-Azimuth and Multi-Frequency Dynamic Integrated Stealth Performance of AircraftDocument27 pagesThe Assessment Method For Multi-Azimuth and Multi-Frequency Dynamic Integrated Stealth Performance of AircraftMichael MarciniakNo ratings yet
- Data Analysis of Aircraft Take-Off Performance: LI Meng-Yu Xiao You-An Qiao ShuangDocument5 pagesData Analysis of Aircraft Take-Off Performance: LI Meng-Yu Xiao You-An Qiao ShuangDimas ArisetyawanNo ratings yet
- Offshore Technology Report: Partial Safety Factors For SINTAP ProcedureDocument42 pagesOffshore Technology Report: Partial Safety Factors For SINTAP Procedureklomps_jrNo ratings yet
- Determination of Drag Polar From Flight Test Data I) Area of StudyDocument2 pagesDetermination of Drag Polar From Flight Test Data I) Area of StudyaadiNo ratings yet
- Predicting Flight Delay Based On Multiple Linear RDocument8 pagesPredicting Flight Delay Based On Multiple Linear RAlexandros ChatzipetrosNo ratings yet
- Helicopter Firing-Rocket Performance and Pilot S Workload Evaluation From Flight DataDocument6 pagesHelicopter Firing-Rocket Performance and Pilot S Workload Evaluation From Flight DataGustavo Rothmund BolfeNo ratings yet
- Lei 2020 IOP Conf. Ser. Mater. Sci. Eng. 780 072019Document7 pagesLei 2020 IOP Conf. Ser. Mater. Sci. Eng. 780 072019AlvinNo ratings yet
- MultiCellWing PDFDocument17 pagesMultiCellWing PDFIancu ParaschivNo ratings yet
- A Comparisonof Wortmann Airfoil: - ' - ::o: O. - OiDocument15 pagesA Comparisonof Wortmann Airfoil: - ' - ::o: O. - Oianoon17290No ratings yet
- Propulsion Economic Considerations For Next Generation Space LaunchDocument9 pagesPropulsion Economic Considerations For Next Generation Space LaunchchrisytaylorNo ratings yet
- 2011 - Design and Wind Tunnel Tests of A Tiltwing UAVDocument11 pages2011 - Design and Wind Tunnel Tests of A Tiltwing UAVahmad.yasser123456No ratings yet
- Fabrication of A Unmanned Air Vehicle Wing For Better EnduranceDocument10 pagesFabrication of A Unmanned Air Vehicle Wing For Better EnduranceTJPRC PublicationsNo ratings yet
- La Cumbancha 2.0 - Pájaro (Glider) : Pontifical Bolivarian UniversityDocument17 pagesLa Cumbancha 2.0 - Pájaro (Glider) : Pontifical Bolivarian UniversityDaniela CuartasNo ratings yet
- Qualification Test Methods For Satellite ACS Thrusters (Coste)Document12 pagesQualification Test Methods For Satellite ACS Thrusters (Coste)GoldRocket44No ratings yet
- Safety Modeling and Simulation of Multi-Factor Coupling Heavy-Equipment AirdropDocument8 pagesSafety Modeling and Simulation of Multi-Factor Coupling Heavy-Equipment AirdropMutiara KhalishNo ratings yet
- Paper Initial 1Document7 pagesPaper Initial 1rakshith sNo ratings yet
- Hover Copter AnalysisDocument3 pagesHover Copter AnalysisGustavo Nárez Jr.No ratings yet
- DLR K Paper 2020Document13 pagesDLR K Paper 2020SubhasreeNo ratings yet
- An Examination of Engine Effects On HelicopterDocument10 pagesAn Examination of Engine Effects On HelicoptershyjusnairNo ratings yet
- Thesis QuadrotorDocument4 pagesThesis Quadrotorsamantharandallomaha100% (2)
- The Whole Trajectory Simulation of Cruise Missile Based On Inertial Navigation Error ModelDocument5 pagesThe Whole Trajectory Simulation of Cruise Missile Based On Inertial Navigation Error ModelBohdan MNo ratings yet
- Ceas2007 Loads ArticleDocument6 pagesCeas2007 Loads ArticleSAMEHNo ratings yet
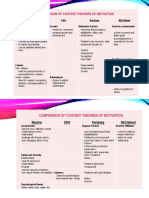
- Comparison of Content THeoriesDocument2 pagesComparison of Content THeoriesMelNo ratings yet
- Stomac Și Duoden - LawrenceDocument45 pagesStomac Și Duoden - LawrenceNicole IoanidNo ratings yet
- Wikispecies, Free Species DirectoryDocument5 pagesWikispecies, Free Species DirectoryjpescuderoNo ratings yet
- Career Options Based On Career Development Concepts andDocument6 pagesCareer Options Based On Career Development Concepts andFelyn DelaCruz - DalinoNo ratings yet
- Consumer TheoryDocument45 pagesConsumer TheoryCM MukukNo ratings yet
- Is Ethical Hacking Ethical?: Danish JamilDocument6 pagesIs Ethical Hacking Ethical?: Danish JamilFrancisco Paglia0% (1)
- Prolin API Programming Guide: PAX Computer Technology (Shenzhen) Co., LTDDocument239 pagesProlin API Programming Guide: PAX Computer Technology (Shenzhen) Co., LTDFudencio BengalaNo ratings yet
- Jawaban Soal Sales Forecast TM 5Document3 pagesJawaban Soal Sales Forecast TM 5Dhea Alfa NurezaNo ratings yet
- Techstars Deal Two Pager (Shareable For MDS)Document2 pagesTechstars Deal Two Pager (Shareable For MDS)DragosnicNo ratings yet
- NT Build 059 Cladding Materials - Indentation Hardness - Nordtest MethodDocument4 pagesNT Build 059 Cladding Materials - Indentation Hardness - Nordtest MethodironfaceNo ratings yet
- Chapter4 Creativity and The Business Idea PDFDocument26 pagesChapter4 Creativity and The Business Idea PDFMark DelacruzNo ratings yet
- Elements of Press Tool: Base PlateDocument3 pagesElements of Press Tool: Base PlateSujay AvatiNo ratings yet
- Babar Suite Organ CoverDocument5 pagesBabar Suite Organ CoverAlex FerreiraNo ratings yet
- Application For Property Tax Abatement Exemption: Texas Comptroller of Public AccountsDocument3 pagesApplication For Property Tax Abatement Exemption: Texas Comptroller of Public AccountsNnamdi AzikeNo ratings yet
- Here Are Some House Rules For Managing This Online Seesion Which Should Help Us To Run More SmoothlyDocument5 pagesHere Are Some House Rules For Managing This Online Seesion Which Should Help Us To Run More SmoothlyMyles NiderNo ratings yet
- Local & Remote ReplicationDocument3 pagesLocal & Remote Replicationpadhiary jagannathNo ratings yet
- Wiac - Info PDF Make My Trip Invoice nf250627345867 PRDocument1 pageWiac - Info PDF Make My Trip Invoice nf250627345867 PRGopal SoneeNo ratings yet
- Slides For Chapter 20: CORBA Case Study: Distributed Systems: Concepts and DesignDocument15 pagesSlides For Chapter 20: CORBA Case Study: Distributed Systems: Concepts and DesignMuhammad Farooq0% (1)
- EPM Manual DensityPRODocument196 pagesEPM Manual DensityPRODiego ReyesNo ratings yet
- Pile Capacity Calculation: Axial Capacity of Bored Piles in Cohesive Soil Using SPT ValuesDocument2 pagesPile Capacity Calculation: Axial Capacity of Bored Piles in Cohesive Soil Using SPT ValuesMd Ahsanul KabirNo ratings yet
- G.R. No. 132681Document4 pagesG.R. No. 132681Joovs JoovhoNo ratings yet