You might also like
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964From EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNo ratings yet
- Reliability Assessment of Bearing CapacityDocument8 pagesReliability Assessment of Bearing CapacityHannah JovannNo ratings yet
- OMAE2012-83586: Safety Factors For Fatigue Analysis of Flexible Pipes Based On Structural ReliabilityDocument6 pagesOMAE2012-83586: Safety Factors For Fatigue Analysis of Flexible Pipes Based On Structural ReliabilityBruno ChagasNo ratings yet
- Computational Uncertainties of Ship Hull Girder ReDocument11 pagesComputational Uncertainties of Ship Hull Girder ReSunil Kumar P GNo ratings yet
- Design of Vertical Wall Caisson BreakwatersDocument14 pagesDesign of Vertical Wall Caisson BreakwatersHRCNo ratings yet
- Retaining WallDocument15 pagesRetaining WallMarija DojcinovskaNo ratings yet
- Ipc2022 - 87102 A Risk-Based Design Approach For Uncased Pipe Under Roads and RailwaysDocument10 pagesIpc2022 - 87102 A Risk-Based Design Approach For Uncased Pipe Under Roads and RailwaysOswaldo MontenegroNo ratings yet
- Xiao 2016Document13 pagesXiao 2016Luchin Lopez MerinoNo ratings yet
- Bijlaard 2010Document15 pagesBijlaard 2010xyxtofNo ratings yet
- Shinozuka (1983) Basic Analysis of Structural SafetyDocument20 pagesShinozuka (1983) Basic Analysis of Structural SafetyFlavia GelattiNo ratings yet
- Offshore Technology Report: Partial Safety Factors For SINTAP ProcedureDocument42 pagesOffshore Technology Report: Partial Safety Factors For SINTAP Procedureklomps_jrNo ratings yet
- Flyrock Control PDFDocument5 pagesFlyrock Control PDFaiueoNo ratings yet
- Ammar Mohammed 2013, Numerical Modeling of Slope Stability AnalysisDocument10 pagesAmmar Mohammed 2013, Numerical Modeling of Slope Stability AnalysisElard QANo ratings yet
- Calibration of Partial Safety Factors For Offshore Foundation DesignDocument19 pagesCalibration of Partial Safety Factors For Offshore Foundation Designamar alicheNo ratings yet
- Offshore Technology Report: Partial Safety Factors For SINTAP ProcedureDocument42 pagesOffshore Technology Report: Partial Safety Factors For SINTAP Procedureamd mhmNo ratings yet
- Evaluation of Reduction Factor For Reinforced Concrete Buildings Retrofitted With CFRP JacketsDocument11 pagesEvaluation of Reduction Factor For Reinforced Concrete Buildings Retrofitted With CFRP JacketsAnna SanchezNo ratings yet
- Barragem ConfiabilidadeDocument20 pagesBarragem ConfiabilidadeJéssica BorgesNo ratings yet
- Seismic Performance Evaluation of Facilities Methodology and ImplementationDocument9 pagesSeismic Performance Evaluation of Facilities Methodology and ImplementationMichael Murfinator MurphyNo ratings yet
- Aircraft Reliability Assessment For An Individual Mission Based On Recordable Flight ParametersDocument10 pagesAircraft Reliability Assessment For An Individual Mission Based On Recordable Flight ParameterskaanNo ratings yet
- Risk Targeting in Seismic Design Codes: The State of The Art, Outstanding Issues and Possible Paths ForwardDocument13 pagesRisk Targeting in Seismic Design Codes: The State of The Art, Outstanding Issues and Possible Paths ForwardfaisaladeNo ratings yet
- Hazard Maps Fragility Maps & Shake Maps: Project Rainbow IIDocument62 pagesHazard Maps Fragility Maps & Shake Maps: Project Rainbow IIDavid Gutierrez RiveraNo ratings yet
- Estimation of Lifetime Maximum Distributions of Bridge Traffic Load EffectsDocument6 pagesEstimation of Lifetime Maximum Distributions of Bridge Traffic Load Effectswafiullah sayedNo ratings yet
- Meyerhof sr247-006Document13 pagesMeyerhof sr247-006IndyNo ratings yet
- Vehicular Bridges Piers ReliabilityDocument7 pagesVehicular Bridges Piers ReliabilityJair GonzalezNo ratings yet
- Vulnerability Reliability and Exposure Current Design ParadigmsDocument50 pagesVulnerability Reliability and Exposure Current Design Paradigmsjentayu_putih3459No ratings yet
- Reliability-And Risk - Based Design of Coastal Flood DefencesDocument13 pagesReliability-And Risk - Based Design of Coastal Flood DefencesAsdf GhjklNo ratings yet
- 2007 Re Mre Deliverable d2 4 Ripcord IserestDocument28 pages2007 Re Mre Deliverable d2 4 Ripcord IserestEdwin JimenezNo ratings yet
- ENGINEERING SEISMIC RISK ANALYSIS by Cornell PDFDocument24 pagesENGINEERING SEISMIC RISK ANALYSIS by Cornell PDFAlexis Vargas100% (1)
- 06 Chapter 7Document46 pages06 Chapter 7anderson marcosNo ratings yet
- 1583 Cornell Risk SeismicDocument24 pages1583 Cornell Risk SeismicJulbert Andreé Valverde RiveraNo ratings yet
- Risk Analysis Based CWR Track Buckling Safety EvaluationsDocument19 pagesRisk Analysis Based CWR Track Buckling Safety EvaluationsmasoudNo ratings yet
- Risk Analysis and The Decision-Making Process in EngineeringDocument33 pagesRisk Analysis and The Decision-Making Process in EngineeringchoopoNo ratings yet
- Kralik Kralik Aspekty2010clanokDocument12 pagesKralik Kralik Aspekty2010clanoksugyanibalaNo ratings yet
- Paper nr180 Diamantidis-HolickyDocument5 pagesPaper nr180 Diamantidis-Holickyhotch potchNo ratings yet
- LIBRO - Dhillon - Reliability in The Mechanical Design Process - Chapter 31 PDFDocument24 pagesLIBRO - Dhillon - Reliability in The Mechanical Design Process - Chapter 31 PDFFreeLatinBirdNo ratings yet
- Levels of Reliability MethodsDocument27 pagesLevels of Reliability MethodsManuel CampidelliNo ratings yet
- Probability and Sensitivity Analysis of Machine Foundation and Soil InteractionDocument14 pagesProbability and Sensitivity Analysis of Machine Foundation and Soil InteractionsugyanibalaNo ratings yet
- FOS & Reliability (2011-MS-CEG-12)Document21 pagesFOS & Reliability (2011-MS-CEG-12)Nauman IjazNo ratings yet
- Materials: Fatigue Reliability Analysis of A Compressor Disk Based On Probability Cumulative Damage CriterionDocument15 pagesMaterials: Fatigue Reliability Analysis of A Compressor Disk Based On Probability Cumulative Damage CriterionHarshitNo ratings yet
- Probabilistic Study of The Aerodynamic Around A 3D WingDocument11 pagesProbabilistic Study of The Aerodynamic Around A 3D WingAlfredo Gonzalez SoteloNo ratings yet
- Slope Stability Analysis Using Slopeex Program in Comparison With Commercial SoftwareDocument6 pagesSlope Stability Analysis Using Slopeex Program in Comparison With Commercial SoftwareBernard Kipng'enoNo ratings yet
- Devriendt, M. (2010) - Risk Analysis For Tunnelling Ground Movement Assessments PDFDocument10 pagesDevriendt, M. (2010) - Risk Analysis For Tunnelling Ground Movement Assessments PDFamir hossein KabiriNo ratings yet
- An Assessment of Safety Factor For Tunnels Excavated in Soils and Jointed Rock MassDocument8 pagesAn Assessment of Safety Factor For Tunnels Excavated in Soils and Jointed Rock MassHarold TaylorNo ratings yet
- I-7. Probabilistic Stability Analysis (Reliability Analysis)Document14 pagesI-7. Probabilistic Stability Analysis (Reliability Analysis)Dio Alif HutamaNo ratings yet
- Ijetae Acecim14 05 PDFDocument5 pagesIjetae Acecim14 05 PDFsayedkhader ahmedNo ratings yet
- Generalized Reliability Model For Local Scour Around Bridge Piers of Various ShapesDocument12 pagesGeneralized Reliability Model For Local Scour Around Bridge Piers of Various ShapesMuhammad AzmiNo ratings yet
- Structural Reliability of Offshore Platforms Considering Fatigue Damage and Different Failure ScenariosDocument8 pagesStructural Reliability of Offshore Platforms Considering Fatigue Damage and Different Failure ScenariosAlexis LopezNo ratings yet
- Slope Stability Analysis Using Slopeex Program in Comparison With Commercial Software PDFDocument6 pagesSlope Stability Analysis Using Slopeex Program in Comparison With Commercial Software PDFEric ChanNo ratings yet
- Seismic Damage Prediction by Deterministic Methods: Concepts and ProceduresDocument16 pagesSeismic Damage Prediction by Deterministic Methods: Concepts and ProceduresmohamedNo ratings yet
- Structural Reliability Analysis of Stiffened PanelsDocument18 pagesStructural Reliability Analysis of Stiffened PanelsdbasekicNo ratings yet
- On The Development of A Risk Management Plan For Tunnelling: Geodata Spa Corso Geodata Spa CorsoDocument5 pagesOn The Development of A Risk Management Plan For Tunnelling: Geodata Spa Corso Geodata Spa CorsoHarold TaylorNo ratings yet
- Assessing Expected Fractional Damage of Above-Ground Buildings From Air-To-Surface Weapons Based On Indirect Fire ConceptDocument6 pagesAssessing Expected Fractional Damage of Above-Ground Buildings From Air-To-Surface Weapons Based On Indirect Fire ConceptOmar Marghani SalmaNo ratings yet
- MultiCellWing PDFDocument17 pagesMultiCellWing PDFIancu ParaschivNo ratings yet
- References For Thesis ProposalDocument6 pagesReferences For Thesis ProposalJihan PacerNo ratings yet
- Probabilistic Assessment of Fracture Mechanics of Low Pressure Turbine Disk KeywayDocument8 pagesProbabilistic Assessment of Fracture Mechanics of Low Pressure Turbine Disk KeywayManoj Paul JohnNo ratings yet
- Study On Safety Level of RC Beam Bridges Under Earthquake: Articles You May Be Interested inDocument9 pagesStudy On Safety Level of RC Beam Bridges Under Earthquake: Articles You May Be Interested inVidisha ChothaniNo ratings yet
- 10 1111@j 1539-6924 2008 01030 X PDFDocument16 pages10 1111@j 1539-6924 2008 01030 X PDFSajid Mohy Ul DinNo ratings yet
- EUROCODE 7: A New Way To Verify A Slope's StabilityDocument4 pagesEUROCODE 7: A New Way To Verify A Slope's Stabilitydimitrios25No ratings yet
- IEC Safety Factors PaperDocument11 pagesIEC Safety Factors PaperHéctor LodosoNo ratings yet
- Sources of The Deficiencies in The Popular SPC/E and TIP3P Models of WaterDocument5 pagesSources of The Deficiencies in The Popular SPC/E and TIP3P Models of WaterTukaj ZakajNo ratings yet
- Sonmez and UlusayDocument23 pagesSonmez and UlusayJayanti TangdiomboNo ratings yet
- X-Ray FluorescenceDocument16 pagesX-Ray Fluorescencevasilik0787No ratings yet
- Class - 12th - Ai TS 2023-2024Document2 pagesClass - 12th - Ai TS 2023-2024kiran sachan katiyarNo ratings yet
- ChE 123 LE 1 Samplex PDFDocument3 pagesChE 123 LE 1 Samplex PDFgoogley71No ratings yet
- "Free Electricity" Potential Radiant Charge DipoleDocument13 pages"Free Electricity" Potential Radiant Charge Dipoleclarky2003No ratings yet
- Phase Behaviour of Polymer Blends - 2005Document200 pagesPhase Behaviour of Polymer Blends - 2005Oleg RudNo ratings yet
- Plastic Analysis of Beams and FramesDocument2 pagesPlastic Analysis of Beams and FramesFerialAssmaniNo ratings yet
- rOCKY Dem Manual (058-102)Document45 pagesrOCKY Dem Manual (058-102)eduardo huanca100% (1)
- 02.UNIT-1 - Properties of Matter PDFDocument30 pages02.UNIT-1 - Properties of Matter PDFsindhuja100% (6)
- Vsv2 Aueet-2021 SyllabusDocument16 pagesVsv2 Aueet-2021 Syllabusvinjarapu anuradhaNo ratings yet
- RESISTIVITY and CONDUCTIVITY of MaterialsDocument22 pagesRESISTIVITY and CONDUCTIVITY of Materialsbalweg mackyNo ratings yet
- Buoyancy and Archimedes Principle - 2023-3Document29 pagesBuoyancy and Archimedes Principle - 2023-3Jenny ZhangNo ratings yet
- Margins of RealityDocument8 pagesMargins of RealityJonathan Stults100% (3)
- Rheology and Transport Phenomena (FET)Document9 pagesRheology and Transport Phenomena (FET)Subhankar MaityNo ratings yet
- Steel 4140Document116 pagesSteel 4140KarenMar DCNo ratings yet
- Mini ProjectDocument3 pagesMini ProjectSyafiq KamilNo ratings yet
- API-521 Flare KOD Design and Even More - Part 2.desbloqueadoDocument6 pagesAPI-521 Flare KOD Design and Even More - Part 2.desbloqueadoFernando Mendez100% (1)
- To HydraulicsDocument14 pagesTo HydraulicsBry RamosNo ratings yet
- Understanding 61439 by 3 Phase DesignDocument78 pagesUnderstanding 61439 by 3 Phase DesignAhamed Ashith100% (2)
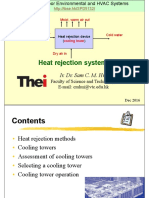
- Heat Rejection Systems: Ir. Dr. Sam C. M. HuiDocument54 pagesHeat Rejection Systems: Ir. Dr. Sam C. M. HuiVin KenNo ratings yet
- 1.0schaums Outlines 2010Document4 pages1.0schaums Outlines 2010mrana_560% (1)
- Criterions For Selection of Volume Induction Heating ParametersDocument23 pagesCriterions For Selection of Volume Induction Heating ParametersVidhuPandeyNo ratings yet
- Chapter 3 Outline Atoms: The Building Blocks of Matter ChapterDocument5 pagesChapter 3 Outline Atoms: The Building Blocks of Matter ChapterTomás Monzón100% (1)
- Module 5 Nuclear PhysicsDocument24 pagesModule 5 Nuclear PhysicsZero EstrellaNo ratings yet
- Work Power EnergyDocument5 pagesWork Power EnergysakthivelNo ratings yet
- Physical Properties of FluidDocument12 pagesPhysical Properties of Fluidridzuan260496No ratings yet
- 11 - Convection & Reynolds NumberDocument19 pages11 - Convection & Reynolds NumberMahir MahmoodNo ratings yet
- S 4C Temp Demo - 4cDocument5 pagesS 4C Temp Demo - 4cdnavarrete01No ratings yet
- 2170303Document3 pages2170303freeNo ratings yet
- Summary of Noah Kagan's Million Dollar WeekendFrom EverandSummary of Noah Kagan's Million Dollar WeekendRating: 5 out of 5 stars5/5 (2)
- 7 Principles of Transformational Leadership: Create a Mindset of Passion, Innovation, and GrowthFrom Everand7 Principles of Transformational Leadership: Create a Mindset of Passion, Innovation, and GrowthRating: 5 out of 5 stars5/5 (52)
- The 7 Habits of Highly Effective PeopleFrom EverandThe 7 Habits of Highly Effective PeopleRating: 4 out of 5 stars4/5 (2568)
- Scaling Up: How a Few Companies Make It...and Why the Rest Don't, Rockefeller Habits 2.0From EverandScaling Up: How a Few Companies Make It...and Why the Rest Don't, Rockefeller Habits 2.0Rating: 5 out of 5 stars5/5 (2)
- High Road Leadership: Bringing People Together in a World That DividesFrom EverandHigh Road Leadership: Bringing People Together in a World That DividesNo ratings yet
- How to Talk to Anyone at Work: 72 Little Tricks for Big Success Communicating on the JobFrom EverandHow to Talk to Anyone at Work: 72 Little Tricks for Big Success Communicating on the JobRating: 4.5 out of 5 stars4.5/5 (37)
- The Coaching Habit: Say Less, Ask More & Change the Way You Lead ForeverFrom EverandThe Coaching Habit: Say Less, Ask More & Change the Way You Lead ForeverRating: 4.5 out of 5 stars4.5/5 (186)
- The First Minute: How to start conversations that get resultsFrom EverandThe First Minute: How to start conversations that get resultsRating: 4.5 out of 5 stars4.5/5 (57)
- How to Lead: Wisdom from the World's Greatest CEOs, Founders, and Game ChangersFrom EverandHow to Lead: Wisdom from the World's Greatest CEOs, Founders, and Game ChangersRating: 4.5 out of 5 stars4.5/5 (95)
- The 7 Habits of Highly Effective People: 30th Anniversary EditionFrom EverandThe 7 Habits of Highly Effective People: 30th Anniversary EditionRating: 5 out of 5 stars5/5 (338)
- The Introverted Leader: Building on Your Quiet StrengthFrom EverandThe Introverted Leader: Building on Your Quiet StrengthRating: 4.5 out of 5 stars4.5/5 (35)
- Billion Dollar Lessons: What You Can Learn from the Most Inexcusable Business Failures of the Last Twenty-five YearsFrom EverandBillion Dollar Lessons: What You Can Learn from the Most Inexcusable Business Failures of the Last Twenty-five YearsRating: 4.5 out of 5 stars4.5/5 (52)
- Think Like Amazon: 50 1/2 Ideas to Become a Digital LeaderFrom EverandThink Like Amazon: 50 1/2 Ideas to Become a Digital LeaderRating: 4.5 out of 5 stars4.5/5 (62)
- Spark: How to Lead Yourself and Others to Greater SuccessFrom EverandSpark: How to Lead Yourself and Others to Greater SuccessRating: 4.5 out of 5 stars4.5/5 (132)
- Leadership Skills that Inspire Incredible ResultsFrom EverandLeadership Skills that Inspire Incredible ResultsRating: 4.5 out of 5 stars4.5/5 (11)
- 25 Ways to Win with People: How to Make Others Feel Like a Million BucksFrom Everand25 Ways to Win with People: How to Make Others Feel Like a Million BucksRating: 5 out of 5 stars5/5 (37)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- Good to Great by Jim Collins - Book Summary: Why Some Companies Make the Leap...And Others Don'tFrom EverandGood to Great by Jim Collins - Book Summary: Why Some Companies Make the Leap...And Others Don'tRating: 4.5 out of 5 stars4.5/5 (64)
- Superminds: The Surprising Power of People and Computers Thinking TogetherFrom EverandSuperminds: The Surprising Power of People and Computers Thinking TogetherRating: 3.5 out of 5 stars3.5/5 (7)
- Get Scalable: The Operating System Your Business Needs To Run and Scale Without YouFrom EverandGet Scalable: The Operating System Your Business Needs To Run and Scale Without YouRating: 5 out of 5 stars5/5 (1)
- The Oz Principle: Getting Results Through Individual and Organizational AccountabilityFrom EverandThe Oz Principle: Getting Results Through Individual and Organizational AccountabilityRating: 4.5 out of 5 stars4.5/5 (30)
- Management Mess to Leadership Success: 30 Challenges to Become the Leader You Would FollowFrom EverandManagement Mess to Leadership Success: 30 Challenges to Become the Leader You Would FollowRating: 4.5 out of 5 stars4.5/5 (27)
- The Effective Executive: The Definitive Guide to Getting the Right Things DoneFrom EverandThe Effective Executive: The Definitive Guide to Getting the Right Things DoneRating: 4.5 out of 5 stars4.5/5 (469)