You might also like
- Branson Manual BookDocument104 pagesBranson Manual BookAchmad Hadi Kurniawan100% (4)
- Udimet Alloy 520Document1 pageUdimet Alloy 520Svetlana PerekopskayaNo ratings yet
- Brochure - Series PRA & TRBDocument4 pagesBrochure - Series PRA & TRBNixiusNo ratings yet
- Arindam Seminar 11Document6 pagesArindam Seminar 11Arindam BhattacharjeeNo ratings yet
- Model Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellDocument16 pagesModel Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellPhuor TyNo ratings yet
- 2 Symposium On Lift and Escalator TechnologiesDocument12 pages2 Symposium On Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- A Sensorless Robust Vector Control of Induction Motor DrivesDocument6 pagesA Sensorless Robust Vector Control of Induction Motor DrivesLava KumarNo ratings yet
- Modeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of MostDocument10 pagesModeling Induction Motors: Abstract: in This Paper, A Novel Technique For On-Line Estimation of Mostseshubabu_999No ratings yet
- Design of Variable Coupler Curve Four-Bar Mechanisms: Ren-Chung Soong and Sun-Li WuDocument9 pagesDesign of Variable Coupler Curve Four-Bar Mechanisms: Ren-Chung Soong and Sun-Li WuAshokNo ratings yet
- Neural Network Based Inverse Kinematics Solution F PDFDocument8 pagesNeural Network Based Inverse Kinematics Solution F PDFBara Abu ShaqraNo ratings yet
- A New Analytical Method On The Field Calculation of IPMDocument9 pagesA New Analytical Method On The Field Calculation of IPMYusuf YaşaNo ratings yet
- Parametric Cad/Cae Tool in Modal Analysis: Numerical Results and Experimental OutcomesDocument4 pagesParametric Cad/Cae Tool in Modal Analysis: Numerical Results and Experimental OutcomesShan aliNo ratings yet
- S Curve AlgorithDocument8 pagesS Curve AlgorithfmjmxNo ratings yet
- EP-Based Optimisation For Estimating Synchronising and Damping Torque CoefficientsDocument7 pagesEP-Based Optimisation For Estimating Synchronising and Damping Torque CoefficientsSaddam HussainNo ratings yet
- Kinmatics Invese CalcuDocument6 pagesKinmatics Invese CalcukinfegetaNo ratings yet
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDocument9 pagesThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsBignaturalNo ratings yet
- Ica20110200012 71434152Document7 pagesIca20110200012 71434152Lê Tuấn MinhNo ratings yet
- Af 65Document10 pagesAf 65he maNo ratings yet
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDocument6 pagesThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsmiguelrlzNo ratings yet
- 019 036 PDFDocument18 pages019 036 PDFmechernene_aek9037No ratings yet
- Motor Model For Torsional Analysis of Variable Speed Drives With Induction MotorDocument11 pagesMotor Model For Torsional Analysis of Variable Speed Drives With Induction MotorRadu BabauNo ratings yet
- Realization of An Asynchronous Six-Phase Induction Motor Drive Test-RigDocument5 pagesRealization of An Asynchronous Six-Phase Induction Motor Drive Test-Rigsathish100% (1)
- InTech-Speed Sensorless Control of Motor For Railway VehiclesDocument25 pagesInTech-Speed Sensorless Control of Motor For Railway VehiclesdimitaringNo ratings yet
- Robotica (2006)Document6 pagesRobotica (2006)Sachin ShendeNo ratings yet
- Mub04 Jour Pra PDFDocument21 pagesMub04 Jour Pra PDFakashpatro25No ratings yet
- Combining The Principles of Variable Structure, Direct Torque Control, and Space Vector Modulation For Induction Motor Fed by Matrix ConverterDocument7 pagesCombining The Principles of Variable Structure, Direct Torque Control, and Space Vector Modulation For Induction Motor Fed by Matrix ConverterGacem AminaNo ratings yet
- Mam 005Document8 pagesMam 005dharamuuNo ratings yet
- Mathematical Modelling of Multirotor UAVDocument6 pagesMathematical Modelling of Multirotor UAVchernet tayeNo ratings yet
- Vibration Calculations in A Electric MotorDocument14 pagesVibration Calculations in A Electric MotorSantiago MolinaNo ratings yet
- Theoretical and Experimental Efficiency Analysis of Multi-Degrees-of-Freedom Epicyclic Gear TrainsDocument21 pagesTheoretical and Experimental Efficiency Analysis of Multi-Degrees-of-Freedom Epicyclic Gear TrainsAmin ShafanezhadNo ratings yet
- A Torque Cancelling System For Quick-Motion Robots: Daigoro IsobeDocument21 pagesA Torque Cancelling System For Quick-Motion Robots: Daigoro IsobeRavi KhandelwalNo ratings yet
- Two Speed Epicycle Gear TrainsDocument7 pagesTwo Speed Epicycle Gear Trainsxmtqnkn8vjNo ratings yet
- Permanent Magnet Synchronous Motor Parameter Identification Using Particle Swarm OptimizationDocument8 pagesPermanent Magnet Synchronous Motor Parameter Identification Using Particle Swarm OptimizationSrinivas KamarsuNo ratings yet
- Stiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasDocument7 pagesStiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasIJMERNo ratings yet
- Actuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùDocument6 pagesActuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùadilsondissoNo ratings yet
- MRAS Based Modified Speed Estimator For Speed Sensorless Field Oriented Controlled Induction Motor Drive Using MatlabDocument7 pagesMRAS Based Modified Speed Estimator For Speed Sensorless Field Oriented Controlled Induction Motor Drive Using MatlabSHADAB SYEDNo ratings yet
- Ismaiel2021 1Document8 pagesIsmaiel2021 1Nguyen Phan LamNo ratings yet
- The Simulation of Switched Reluctance Motor With The Rapid Nonlinear MethodDocument5 pagesThe Simulation of Switched Reluctance Motor With The Rapid Nonlinear MethodFairul AzharNo ratings yet
- Real Modes ExtractionDocument10 pagesReal Modes ExtractionrenatobellarosaNo ratings yet
- Simulation and Analysis of Modified DTC of PMSMDocument10 pagesSimulation and Analysis of Modified DTC of PMSMpreetivermaeeeNo ratings yet
- Li 2019 J. Phys. Conf. Ser. 1302 022054 PDFDocument8 pagesLi 2019 J. Phys. Conf. Ser. 1302 022054 PDFsalah eddineNo ratings yet
- Design and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFDocument5 pagesDesign and Simulation of Control System For Bearingless Synchronous Reluctance Motor PDFKrishnam NaiduNo ratings yet
- 3D-Multi Body Simulation of Wind Turbines With Flexible ComponentsDocument4 pages3D-Multi Body Simulation of Wind Turbines With Flexible ComponentsJesus MamaniNo ratings yet
- Electronics: A New Seven-Segment Profile Algorithm For An Open Source Architecture in A Hybrid Electronic PlatformDocument18 pagesElectronics: A New Seven-Segment Profile Algorithm For An Open Source Architecture in A Hybrid Electronic Platformpatrickcjh5236No ratings yet
- On Algorithms For Planning S-Curve Motion ProfilesDocument8 pagesOn Algorithms For Planning S-Curve Motion Profilessadiqaftab786No ratings yet
- Kinematics and Kinetic Analysis of The Slider-Crank Mechanism in Otto Linear Four Cylinder Z24 EngineDocument11 pagesKinematics and Kinetic Analysis of The Slider-Crank Mechanism in Otto Linear Four Cylinder Z24 Enginekiran_wakchaureNo ratings yet
- Rotors Frequency and Time Response of Torsional Vibration Using Hybrid ModelingDocument8 pagesRotors Frequency and Time Response of Torsional Vibration Using Hybrid ModelingNadia BalqisNo ratings yet
- Modelling of Induction Machines For Electric DrivesDocument6 pagesModelling of Induction Machines For Electric DrivesItipun SakunwanthanasakNo ratings yet
- Simulink Implementation of Two-Phase Induction Motor Model: Gabriela CR - CIUNADocument4 pagesSimulink Implementation of Two-Phase Induction Motor Model: Gabriela CR - CIUNAnitishkatalNo ratings yet
- George Constantinesco Torque Converter Analysis by Simulink PDFDocument6 pagesGeorge Constantinesco Torque Converter Analysis by Simulink PDFslysoft.20009951No ratings yet
- Jeas 0408 94Document7 pagesJeas 0408 94Jun Chee LimNo ratings yet
- IMAC XV 15th Int 15-49-3 Optimization Techniques RotordynamicsDocument7 pagesIMAC XV 15th Int 15-49-3 Optimization Techniques Rotordynamicsuamiranda3518No ratings yet
- Thesis Modeling of Two Rotor MIMO SystemDocument68 pagesThesis Modeling of Two Rotor MIMO SystemEyad Al-MohatwaryNo ratings yet
- Mechanical Engineering and SciencesDocument9 pagesMechanical Engineering and ScienceswarnoiseNo ratings yet
- The Simplified Dynamic Model of A Robot Manipulator: 1 Problem DescriptionDocument6 pagesThe Simplified Dynamic Model of A Robot Manipulator: 1 Problem DescriptionRudnei BarbosaNo ratings yet
- Mathematical Model of Two-Dof Five Links Closed-Chain Mechanism (Pantograph)Document15 pagesMathematical Model of Two-Dof Five Links Closed-Chain Mechanism (Pantograph)Quyết Nguyễn CôngNo ratings yet
- Space Vector Flux Weakening Control of PMSM DriverDocument8 pagesSpace Vector Flux Weakening Control of PMSM DriverOsama AttookNo ratings yet
- Bending Analysis of A Wire Strand Analytic ModelDocument10 pagesBending Analysis of A Wire Strand Analytic ModelJosé Cléber Rodrigues da SilvaNo ratings yet
- Numerical Simulation of Laminar Flow Past A Circular Cylinder - 1-s2.0-S0307904X08000243-MainDocument20 pagesNumerical Simulation of Laminar Flow Past A Circular Cylinder - 1-s2.0-S0307904X08000243-MainShanthan GuduruNo ratings yet
- Controller Design For Mechatronic Rotary Inverted Pendulum Part 1 and Part 2Document15 pagesController Design For Mechatronic Rotary Inverted Pendulum Part 1 and Part 2Nesibe Nur ÇamNo ratings yet
- JESV5SI0109Document5 pagesJESV5SI0109Kiran YaddanapudiNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Characteristic Modes: Theory and Applications in Antenna EngineeringFrom EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNo ratings yet
- Altivar Machine ATV320 - ATV320U40M3CDocument10 pagesAltivar Machine ATV320 - ATV320U40M3CGlenn Midel Delos SantosNo ratings yet
- Dual Nature of Matter and RadiationDocument6 pagesDual Nature of Matter and RadiationGayatriNo ratings yet
- AD 23NLB SpecSheet - ZoFQ4BlTV4Document2 pagesAD 23NLB SpecSheet - ZoFQ4BlTV4Norman MendozaNo ratings yet
- A Theory For Vtol Propeller OperationDocument91 pagesA Theory For Vtol Propeller OperationGökhan KaNo ratings yet
- 02 Pfe ReportDocument129 pages02 Pfe ReportMaNo ratings yet
- Solving The Problem of BuildDocument5 pagesSolving The Problem of BuildDebajit BurhagohainNo ratings yet
- H7 Mini Test 3Document2 pagesH7 Mini Test 3Ramadhan ShaffiNo ratings yet
- 3 Module 1 PDFDocument2 pages3 Module 1 PDFAnna KallivayalilNo ratings yet
- Plant Daily Summary - 30092010Document13 pagesPlant Daily Summary - 30092010anon_996168No ratings yet
- V Zener Voltage: Current Cage Code 67268Document30 pagesV Zener Voltage: Current Cage Code 67268vasiliyNo ratings yet
- Modeling and Simulation of BLDC Motor in Electric Power SteeringDocument4 pagesModeling and Simulation of BLDC Motor in Electric Power SteeringJessi MarieNo ratings yet
- FSN 11 NDocument6 pagesFSN 11 NMauldianWidodoNo ratings yet
- Limit-Value Switch For Temperature Thermistor Input (NTC)Document2 pagesLimit-Value Switch For Temperature Thermistor Input (NTC)AlexanderNo ratings yet
- QSD 1976Document10 pagesQSD 1976Felipe ChagasNo ratings yet
- VRF Atom Series 50Hz - Heat PumpDocument10 pagesVRF Atom Series 50Hz - Heat Pumpperfectair25No ratings yet
- Testing DC Cables & Accessories: Experience & Requirements: Test ProceduresDocument4 pagesTesting DC Cables & Accessories: Experience & Requirements: Test ProceduresA. HassanNo ratings yet
- Ebooks For Jntu Subjects: 2007-2008Document113 pagesEbooks For Jntu Subjects: 2007-2008phanishankarNo ratings yet
- International Journal of Solids and Structures: A.D. Drozdov, J.Dec. ChristiansenDocument15 pagesInternational Journal of Solids and Structures: A.D. Drozdov, J.Dec. Christiansenyaseralewe1No ratings yet
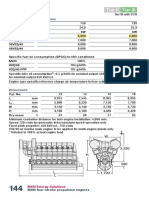
- Speed R/min Mep Bar KW KW 12V32/40 14V32/40 16V32/40 18V32/40 Specific Fuel Oil Consumption (SFOC) To ISO Conditions MCR V32/40 V32/40 FPPDocument1 pageSpeed R/min Mep Bar KW KW 12V32/40 14V32/40 16V32/40 18V32/40 Specific Fuel Oil Consumption (SFOC) To ISO Conditions MCR V32/40 V32/40 FPPghostt123No ratings yet
- Daramola - 2022 - Numerical Assessment of Potential Sea Level Rise Impacts On Coastal Retreat Along The Nigerian Mahin Mud CoastDocument18 pagesDaramola - 2022 - Numerical Assessment of Potential Sea Level Rise Impacts On Coastal Retreat Along The Nigerian Mahin Mud CoastdmgsantosNo ratings yet
- Jun 12Document20 pagesJun 12phin easNo ratings yet
- Question Bank Technical Helper (Distribution) : Sector: Power Reference ID: PSS/ Q 0101Document38 pagesQuestion Bank Technical Helper (Distribution) : Sector: Power Reference ID: PSS/ Q 01019853318441No ratings yet
- SDSS2022 Programme BookDocument22 pagesSDSS2022 Programme BookFerit GashiNo ratings yet
- Numerical Modeling of A Microwave Plasma CVD Reactor: A.M. Gorbachev, V.A. Koldanov, A.L. VikharevDocument5 pagesNumerical Modeling of A Microwave Plasma CVD Reactor: A.M. Gorbachev, V.A. Koldanov, A.L. VikharevYoucef FermiNo ratings yet
- 3rd and 4th Summative TestDocument7 pages3rd and 4th Summative TestAnn OldanNo ratings yet
- VS2 Series Opposed-Mode SensorsDocument4 pagesVS2 Series Opposed-Mode SensorsWilmer Yesid Granados JaimesNo ratings yet
- Dryer: Home/Homestyle/Light OPL Electronic Control Error Codes Master ListDocument10 pagesDryer: Home/Homestyle/Light OPL Electronic Control Error Codes Master ListRustinNo ratings yet