You might also like
- Robot control part 1: Forward transform matricesDocument37 pagesRobot control part 1: Forward transform matricesRamkumar ANo ratings yet
- Matrices de TrasformacionDocument9 pagesMatrices de TrasformacionRuben RaygosaNo ratings yet
- Robots in SpaceDocument8 pagesRobots in SpaceamanNo ratings yet
- 3 DeformationsDocument13 pages3 DeformationsAymen HssainiNo ratings yet
- Position AnalysisDocument10 pagesPosition Analysisjsph021603No ratings yet
- Lec1 RoboticsDocument32 pagesLec1 RoboticsSreenath T VNo ratings yet
- An Introduction To Robotic ManipulatorsDocument29 pagesAn Introduction To Robotic ManipulatorsAyush_Rai_2506No ratings yet
- ME424 201516 Unit4Document56 pagesME424 201516 Unit4venkateshNo ratings yet
- ROBOTICS KINEMATICSDocument56 pagesROBOTICS KINEMATICSharshaNo ratings yet
- Robotics TPDocument15 pagesRobotics TPzineb benjellounNo ratings yet
- Calculus II - Equations of LinesDocument6 pagesCalculus II - Equations of LinesLiz BenhamouNo ratings yet
- Kinema TicDocument13 pagesKinema Ticأحمد دعبسNo ratings yet
- Cal CV00 Dot Cross ProdDocument7 pagesCal CV00 Dot Cross ProdRamNo ratings yet
- Student Workbook: Quanser Robotics Package For Education For MATLAB /simulink UsersDocument33 pagesStudent Workbook: Quanser Robotics Package For Education For MATLAB /simulink UsersPruebaNo ratings yet
- Module 1: A Crash Course in Vectors Lecture 2: Coordinate SystemsDocument10 pagesModule 1: A Crash Course in Vectors Lecture 2: Coordinate SystemsPraveen KumarNo ratings yet
- Tensor Analysis-Chapter 1Document81 pagesTensor Analysis-Chapter 1qftgaugeNo ratings yet
- Curl and DivergenceDocument5 pagesCurl and DivergenceChernet TugeNo ratings yet
- Lecture 2 Introduction To RoboticsDocument12 pagesLecture 2 Introduction To RoboticsDomjul KumzhiNo ratings yet
- Catatan 2Document3 pagesCatatan 2Bria YogasaNo ratings yet
- Electrical - Control Engineering - Prof. Gopal - 012 - Lec-30 Compensator Design Using Root Locus Plots - 0Document4 pagesElectrical - Control Engineering - Prof. Gopal - 012 - Lec-30 Compensator Design Using Root Locus Plots - 0Andrea MunafoNo ratings yet
- Basic Qualities: Animation (In .Avi Format)Document1 pageBasic Qualities: Animation (In .Avi Format)cloroformusNo ratings yet
- Complete Lorentz GroupDocument28 pagesComplete Lorentz GroupTomás CampoNo ratings yet
- CS Mod4@AzDOCUMENTS - inDocument21 pagesCS Mod4@AzDOCUMENTS - insssNo ratings yet
- Lecture 7 - Equivalent Vectors Force and Its Characteristics Moment of A Force About A Point Moment of A Force About An Axis PDFDocument55 pagesLecture 7 - Equivalent Vectors Force and Its Characteristics Moment of A Force About A Point Moment of A Force About An Axis PDFMichael Jeawel AlabanNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Module 1: A Crash Course in Vectors: Lecture 1: Scalar and Vector FieldsDocument56 pagesModule 1: A Crash Course in Vectors: Lecture 1: Scalar and Vector FieldsSayan Kumar KhanNo ratings yet
- Chapter 5 Forward and Inverse KinematicsDocument10 pagesChapter 5 Forward and Inverse KinematicsAkram AlsadeqNo ratings yet
- Lecture2 Sub 02-EnDocument4 pagesLecture2 Sub 02-EnBEN BENNo ratings yet
- Robotics Automation Forward Kinematics (RAFKDocument20 pagesRobotics Automation Forward Kinematics (RAFKMoathNo ratings yet
- Lec 19Document11 pagesLec 19RUCHIRA KUMAR PRADHANNo ratings yet
- Understanding linear transformations visually through matricesDocument19 pagesUnderstanding linear transformations visually through matricesKuyasaidah 22No ratings yet
- Report RoboticsDocument5 pagesReport RoboticsChad NakaokaNo ratings yet
- Joints Types: Revolute Joint 1DOF Prismatic Joint Joint 1DOFDocument33 pagesJoints Types: Revolute Joint 1DOF Prismatic Joint Joint 1DOFf0245652No ratings yet
- SynchrosDocument43 pagesSynchrosjashjaNo ratings yet
- Instructor (Oussama Khatib) :all Right. Let's Get Started. So Today Video Segment IsDocument12 pagesInstructor (Oussama Khatib) :all Right. Let's Get Started. So Today Video Segment IsVaibhav PrakashNo ratings yet
- Flight DynamicsDocument17 pagesFlight Dynamicsdaviz ronNo ratings yet
- Gradient Divergence and Curl in Spherical CoordinatesDocument3 pagesGradient Divergence and Curl in Spherical CoordinatesEddieNo ratings yet
- An Efficient and User Friendly Tone Mapping OperatorDocument6 pagesAn Efficient and User Friendly Tone Mapping Operatorbobbob24No ratings yet
- Engg PhysicsDocument335 pagesEngg PhysicsPrasanth MadhurapantulaNo ratings yet
- Maths Unit 3.1 - ModuleDocument25 pagesMaths Unit 3.1 - ModuleS HNo ratings yet
- CG-module 4 NotesDocument21 pagesCG-module 4 NotesRajeswari RNo ratings yet
- Introduction to Robotics - Jacobians: Velocities and Static ForcesDocument11 pagesIntroduction to Robotics - Jacobians: Velocities and Static ForcesUZAIR MANSOORNo ratings yet
- Module-4 Lecture-2 Perpendicularity Measurement (Refer Slide Time: 00:13)Document26 pagesModule-4 Lecture-2 Perpendicularity Measurement (Refer Slide Time: 00:13)Rahmad WahyudiNo ratings yet
- Lec 20Document11 pagesLec 20RUCHIRA KUMAR PRADHANNo ratings yet
- Paul's Online Math Notes: Double Integrals in Polar CoordinatesDocument21 pagesPaul's Online Math Notes: Double Integrals in Polar CoordinateszetseatNo ratings yet
- Lec 19Document26 pagesLec 19tamizhanNo ratings yet
- Parametric SurfacesDocument7 pagesParametric SurfacesChernet TugeNo ratings yet
- Lec 9Document9 pagesLec 9Mohammed KhazalNo ratings yet
- MITOCW - 4. Movement of A Particle in Circular Motion W/ Polar CoordinatesDocument18 pagesMITOCW - 4. Movement of A Particle in Circular Motion W/ Polar CoordinatesRogerioNo ratings yet
- Homework 9 TCDocument6 pagesHomework 9 TCSebastián TorresNo ratings yet
- Lec 2Document18 pagesLec 2Nahin AminNo ratings yet
- Rigid Motions and Homogeneous Transformations: 2.1 Representing PositionsDocument12 pagesRigid Motions and Homogeneous Transformations: 2.1 Representing PositionsMuhammad UsmanNo ratings yet
- Geometric CalculusDocument7 pagesGeometric CalculusjosgauNo ratings yet
- IntroductionToRobotics Lecture02 PDFDocument15 pagesIntroductionToRobotics Lecture02 PDFzhuang liuNo ratings yet
- ErlP SBcA1sDocument2 pagesErlP SBcA1sSeba SpursNo ratings yet
- Tensor NotationDocument26 pagesTensor NotationVictor Worch ArriagaNo ratings yet
- Lec 5Document14 pagesLec 5Mr G Kaliraj MECHNo ratings yet
- 1111Document45 pages1111Kasahun MekonnenNo ratings yet
- Hardware User'S Manual Versapump 6 Syringe Dispenser Module: For TheDocument119 pagesHardware User'S Manual Versapump 6 Syringe Dispenser Module: For TheRuben RaygosaNo ratings yet
- j2534 TutorDocument24 pagesj2534 TutorRuben RaygosaNo ratings yet
- DIY Weather Station With ESP32: Build a Smart Weather Station Using an ESP32Document25 pagesDIY Weather Station With ESP32: Build a Smart Weather Station Using an ESP32Ruben RaygosaNo ratings yet
- Clase Simulacion AvanzadaDocument9 pagesClase Simulacion AvanzadaRuben RaygosaNo ratings yet
- Calibrando Mpu 9250Document9 pagesCalibrando Mpu 9250Ruben RaygosaNo ratings yet
- Specifications: Physical Mechanical PerformanceDocument4 pagesSpecifications: Physical Mechanical PerformanceRuben RaygosaNo ratings yet
- Configurando Google Sheet y Pushing BoxDocument23 pagesConfigurando Google Sheet y Pushing BoxRuben RaygosaNo ratings yet
- Standard Circuit Diagram ,: LT-32X575 LT-32X585Document75 pagesStandard Circuit Diagram ,: LT-32X575 LT-32X585Ruben RaygosaNo ratings yet
- Tja 1020Document22 pagesTja 1020Manos LoukianosNo ratings yet
- Ar6000 934112Document103 pagesAr6000 934112Ruben RaygosaNo ratings yet
- Hardware User'S Manual Versapump 3 Syringe Dispenser Module: For TheDocument116 pagesHardware User'S Manual Versapump 3 Syringe Dispenser Module: For TheRuben RaygosaNo ratings yet
- Kloenh 8 - Channel - R5 - Pump-Users-ManualDocument119 pagesKloenh 8 - Channel - R5 - Pump-Users-ManualRuben RaygosaNo ratings yet
- Monitron User's Guide: Multi Stressor UnitDocument22 pagesMonitron User's Guide: Multi Stressor UnitRuben RaygosaNo ratings yet
- Digix-1 PLC - Compact Series: FeaturesDocument2 pagesDigix-1 PLC - Compact Series: FeaturesRuben RaygosaNo ratings yet
- Projector Sanyo User Manual Xm-150lDocument89 pagesProjector Sanyo User Manual Xm-150lRuben RaygosaNo ratings yet
- Sensor Arena v2Document9 pagesSensor Arena v2Ruben RaygosaNo ratings yet
- Manual de Servicio y Reparacion IR Blaw Knox PF6110Document756 pagesManual de Servicio y Reparacion IR Blaw Knox PF6110Ruben Raygosa100% (4)
- Samsung Rf-263be Rf-263te Fast Track TroubleshootingDocument8 pagesSamsung Rf-263be Rf-263te Fast Track TroubleshootingRuben Raygosa100% (1)
- STR-W6000S Series: Off-Line PWM Controllers With Integrated Power MOSFETDocument26 pagesSTR-W6000S Series: Off-Line PWM Controllers With Integrated Power MOSFETJulian Andres RozoNo ratings yet
- Diagrama TP - MS3393.PB851 PDFDocument8 pagesDiagrama TP - MS3393.PB851 PDFLuisMiguelCalvo100% (2)
- LG Training ManualDocument44 pagesLG Training ManualRuben RaygosaNo ratings yet
- Power Supply LGP42 13R2 EAX64905401 EAY62810601 LG LED TV 42LN5400 42LN5700 PDFDocument19 pagesPower Supply LGP42 13R2 EAX64905401 EAY62810601 LG LED TV 42LN5400 42LN5700 PDFteniNo ratings yet
- Oslrf-01 LightwareDocument18 pagesOslrf-01 LightwareRuben RaygosaNo ratings yet
- RSAG7 820 5687+LED48EC290N+Hisense+PSUDocument2 pagesRSAG7 820 5687+LED48EC290N+Hisense+PSUlami100% (1)
- Electronics Design of The AGLITE-LIDAR Instrument PDFDocument123 pagesElectronics Design of The AGLITE-LIDAR Instrument PDFRuben RaygosaNo ratings yet
- Sony KDL-32 40 46 55EX720 723 Chassis AZ2-FDocument54 pagesSony KDL-32 40 46 55EX720 723 Chassis AZ2-FFernandoDaSilvaPocas100% (2)
- Design An Initial Testing of A Piezoelectric Sensor For Aeloian Mass TransportDocument8 pagesDesign An Initial Testing of A Piezoelectric Sensor For Aeloian Mass TransportRuben RaygosaNo ratings yet
- Detailed Seismic Assessment Assessment Objectives PrinciplesDocument71 pagesDetailed Seismic Assessment Assessment Objectives Principlesyoshdog@gmail.comNo ratings yet
- Sonnax HP 4L60E Catalog v1Document12 pagesSonnax HP 4L60E Catalog v1Brad Franc100% (2)
- Histograms Answers MMEDocument5 pagesHistograms Answers MMEEffNo ratings yet
- Quality Planning ProcessDocument47 pagesQuality Planning ProcessRAZOR GAMINGNo ratings yet
- Free SEO Audit TemplateDocument3 pagesFree SEO Audit Templatepassivejournal74No ratings yet
- SGT-400 Product PresentationDocument42 pagesSGT-400 Product PresentationAnita Moya100% (3)
- Roads and Maritime Services (RMS) Rms Specification D&C R164 Tunnel Jet FansDocument32 pagesRoads and Maritime Services (RMS) Rms Specification D&C R164 Tunnel Jet FansArmin IranfarNo ratings yet
- Evaluating Pipeline Ovality Acceptability Criteria For Straight Pipe SectionsDocument7 pagesEvaluating Pipeline Ovality Acceptability Criteria For Straight Pipe Sectionsravikr95No ratings yet
- Foliant VEGA 400A Installation ManualDocument18 pagesFoliant VEGA 400A Installation ManualAlexandruNo ratings yet
- Business PlanDocument49 pagesBusiness Plandanie krisyaNo ratings yet
- Computer Practical (C++ Programs) For CBSE XII Practical ExamsDocument74 pagesComputer Practical (C++ Programs) For CBSE XII Practical ExamsShiladitya67% (89)
- Guia de Configuracion de Firewall Basico en GWN7000 Grandstream PDFDocument16 pagesGuia de Configuracion de Firewall Basico en GWN7000 Grandstream PDFmiguel pcNo ratings yet
- Sunny Brochure 16 Pages 23102018 PDFDocument8 pagesSunny Brochure 16 Pages 23102018 PDFSunilNo ratings yet
- Productivity: IncreaseDocument2 pagesProductivity: IncreaseJose Corcega britoNo ratings yet
- Chapter 1. Defining and Collecting Data Triệu Vi GửiDocument43 pagesChapter 1. Defining and Collecting Data Triệu Vi GửiDang Thuy Trang (K17 QN)No ratings yet
- STE Action Plan 2021-2022Document5 pagesSTE Action Plan 2021-2022Bernadette L. Macadangdang100% (1)
- Research Paper - Allison PorterDocument13 pagesResearch Paper - Allison Porterapi-609389611No ratings yet
- Student Assessment GuideDocument72 pagesStudent Assessment GuideDavi MoraesNo ratings yet
- Lec4-5 QDocument4 pagesLec4-5 QBashir Emad kadimNo ratings yet
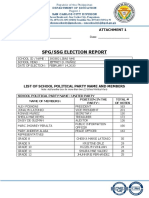
- SPG/SSG Election Report: Attachment 1Document4 pagesSPG/SSG Election Report: Attachment 1Nexus BallesterosNo ratings yet
- Buddy Memory AllocationDocument3 pagesBuddy Memory AllocationBibek GuptaNo ratings yet
- HP 5120 EI Switch SeriesDocument39 pagesHP 5120 EI Switch SeriesKarman77No ratings yet
- Dynamelt LC Series - MasterDocument2 pagesDynamelt LC Series - MasterITWDynatecNo ratings yet
- Wheel Detection System RSR180-AEBDocument2 pagesWheel Detection System RSR180-AEBAmrishGNo ratings yet
- Mini Project On ''Market Overview On Financial Services'' Nishant Mishra 2008010700143Document40 pagesMini Project On ''Market Overview On Financial Services'' Nishant Mishra 2008010700143Sagar MishraNo ratings yet
- PC400 8 1Document549 pagesPC400 8 1Eka Anwar100% (1)
- AW169 Executive and Private Transport Brochure - Gen2020Document8 pagesAW169 Executive and Private Transport Brochure - Gen2020Lavern P. SipinNo ratings yet
- CodeTech Annual Inter-School Tech Symposium Results and WinnersDocument21 pagesCodeTech Annual Inter-School Tech Symposium Results and WinnerskhushiNo ratings yet
- GRC November 2022 Course SlidesDocument145 pagesGRC November 2022 Course SlidesElizabeth CachoNo ratings yet
- Mode of Grouped Data and MidrangeDocument16 pagesMode of Grouped Data and Midrangesfjs/olfdNo ratings yet