You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Solution Manual & Test Bank 2018Document18 pagesSolution Manual & Test Bank 2018test bank for you19% (16)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- M037 Exaquantum Administrator Course Day 1Document112 pagesM037 Exaquantum Administrator Course Day 1Saulius ŽilinskasNo ratings yet
- Db2 E1 Training Material Ver1.0Document101 pagesDb2 E1 Training Material Ver1.0SampathGSNo ratings yet
- Subclassing in MFCDocument3 pagesSubclassing in MFCPiscesvenNo ratings yet
- SOTAS Belgrade 2008 V1Document65 pagesSOTAS Belgrade 2008 V1filzovocNo ratings yet
- Ava 183P DG+Document6 pagesAva 183P DG+Blmjdb AbdelhafidNo ratings yet
- AVA-183MPDocument9 pagesAVA-183MPBlmjdb AbdelhafidNo ratings yet
- CMA-62Document5 pagesCMA-62Blmjdb AbdelhafidNo ratings yet
- EHC-24LDocument5 pagesEHC-24LBlmjdb AbdelhafidNo ratings yet
- Ava 24a D+Document6 pagesAva 24a D+Blmjdb AbdelhafidNo ratings yet
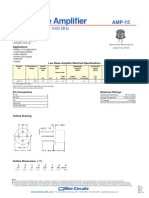
- Amp 15Document2 pagesAmp 15Blmjdb AbdelhafidNo ratings yet
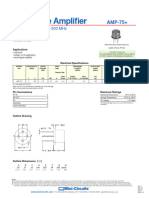
- AMP-75Document2 pagesAMP-75Blmjdb AbdelhafidNo ratings yet
- LAB 5 - Implementing An ALU: GoalsDocument9 pagesLAB 5 - Implementing An ALU: GoalsBlmjdb AbdelhafidNo ratings yet
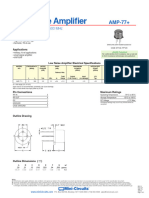
- AMP-77Document2 pagesAMP-77Blmjdb AbdelhafidNo ratings yet
- Spice 0402dfDocument2 pagesSpice 0402dfBlmjdb AbdelhafidNo ratings yet
- PMA3-14LNDocument4 pagesPMA3-14LNBlmjdb AbdelhafidNo ratings yet
- Fahad 2019Document5 pagesFahad 2019Blmjdb AbdelhafidNo ratings yet
- TELKOMNIKA Journal PaperDocument9 pagesTELKOMNIKA Journal PaperBlmjdb AbdelhafidNo ratings yet
- 65nm CMOS Process Data SheetDocument1 page65nm CMOS Process Data SheetBlmjdb Abdelhafid0% (1)
- Part 1 Programming Languages C, C++, PythonDocument31 pagesPart 1 Programming Languages C, C++, PythonRamya NarayananNo ratings yet
- AI For IA Unit 2Document12 pagesAI For IA Unit 2HarshithaNo ratings yet
- Advanced Blowout and Well ControlDocument17 pagesAdvanced Blowout and Well Controlcloudno9110% (1)
- 11 Portraits Humanoid HPDocument20 pages11 Portraits Humanoid HPasdkmflaNo ratings yet
- Maths Book LinkDocument1 pageMaths Book LinkAjay PandeyNo ratings yet
- Login With WhatsApp ProposalDocument10 pagesLogin With WhatsApp ProposalBhavik KoladiyaNo ratings yet
- 02-Common Attacks and Their EffectivenessDocument3 pages02-Common Attacks and Their EffectivenessLuis Miguel P. FreitasNo ratings yet
- ChangesDocument134 pagesChangesmariammariNo ratings yet
- IWS2022 - Tutorial 4 - SOAP With Java Using Axis2Document14 pagesIWS2022 - Tutorial 4 - SOAP With Java Using Axis2Thành Long LữNo ratings yet
- Electrical Engineering Department Academic Session: Oktober 2020Document9 pagesElectrical Engineering Department Academic Session: Oktober 2020Hazrin HelmiNo ratings yet
- Macbook I MacDocument1 pageMacbook I MacVictor Rivera LópezNo ratings yet
- Iee PaperDocument3 pagesIee PaperAmrutha SeshadriNo ratings yet
- Fact Reference PDFDocument182 pagesFact Reference PDFshivam_dubey4004No ratings yet
- NCR RealPOS 70XRT User ManualDocument183 pagesNCR RealPOS 70XRT User ManualMax ParedesNo ratings yet
- Yamaha HTR 2071Document73 pagesYamaha HTR 2071pawansingh01No ratings yet
- Alselectro Wordpress Com 2018-04-16 Esp8266 Wemos d1 With I2Document15 pagesAlselectro Wordpress Com 2018-04-16 Esp8266 Wemos d1 With I2Arieffin NatawidjajaNo ratings yet
- Curriculum Vitae: 1 Personal InformationDocument5 pagesCurriculum Vitae: 1 Personal Informationnthanhtrung269No ratings yet
- Property Checker User ManualDocument11 pagesProperty Checker User ManualAnusha ThelaNo ratings yet
- Miskath Hossain (211002602)Document17 pagesMiskath Hossain (211002602)Ahsan KHANNo ratings yet
- Siebel CRM 100 SuccessDocument209 pagesSiebel CRM 100 Successhans_106No ratings yet
- Man 8035m InstDocument440 pagesMan 8035m InstBALDEV SINGHNo ratings yet
- What Is A BW WorkspaceDocument8 pagesWhat Is A BW Workspacetfaruq_No ratings yet
- First Sem PDFDocument5 pagesFirst Sem PDFRajvardhan JaidevaNo ratings yet
- PV CharacteristicsDocument11 pagesPV Characteristicsyoussef khatibNo ratings yet
- Distribusi Makanan Keluarga Terhadap Status Gizi Balita Usia 1-5 Tahun Di Dusun Rammang-Rammang Kabupaten MarosDocument5 pagesDistribusi Makanan Keluarga Terhadap Status Gizi Balita Usia 1-5 Tahun Di Dusun Rammang-Rammang Kabupaten MarosIsmi Irfiyanti FachruddinNo ratings yet