You might also like
- BioPharma Case StudyDocument4 pagesBioPharma Case StudyNaman Chhaya100% (3)
- Donkey EffectDocument9 pagesDonkey EffectEdson100% (1)
- Answers To CES Test For Seafarers About Vessel StabilityDocument28 pagesAnswers To CES Test For Seafarers About Vessel StabilityMyo Minn TunNo ratings yet
- 01A-3.5 - STS OperationsDocument26 pages01A-3.5 - STS OperationsRajiv VigNo ratings yet
- Ship-to-Ship Oil Transfer OperationsDocument47 pagesShip-to-Ship Oil Transfer OperationsAmeyaManjrekar100% (2)
- A320 System Configuration GuideDocument690 pagesA320 System Configuration GuideÖmür Eryüksel95% (19)
- Marketing Strategy of Hero HondaDocument78 pagesMarketing Strategy of Hero Hondamathuriaanuradha100% (6)
- A Unified Seakeeping and Maneuvering Analysis of Two Interacting ShipsDocument11 pagesA Unified Seakeeping and Maneuvering Analysis of Two Interacting ShipsRajiv ShirodkarNo ratings yet
- 1 PBDocument10 pages1 PBchayangupta1502No ratings yet
- A Unified Seakeeping and Maneuvering Analysis of Two Interacting ShipsDocument10 pagesA Unified Seakeeping and Maneuvering Analysis of Two Interacting Shipsramia_30No ratings yet
- j8!1!26-36 Safety Investigation of Noah ArkDocument11 pagesj8!1!26-36 Safety Investigation of Noah ArkAbinet TesfuNo ratings yet
- Modeling Motion and Loads On Stranded Ships in WavesDocument11 pagesModeling Motion and Loads On Stranded Ships in WavesMahdiNo ratings yet
- Green Sea Loads On General Cargo ShipDocument14 pagesGreen Sea Loads On General Cargo ShipivkenavarchNo ratings yet
- Seam M2Document8 pagesSeam M2Carlo ValdezNo ratings yet
- Inclining Experiment 2Document5 pagesInclining Experiment 2Silent againNo ratings yet
- Answers To Quiz 2Document5 pagesAnswers To Quiz 2Patryk BabińskiNo ratings yet
- Research Paper Semi Finals Week 9 12Document42 pagesResearch Paper Semi Finals Week 9 12Carlo ValdezNo ratings yet
- 30853-Article Text-102317-2-10-20200518Document9 pages30853-Article Text-102317-2-10-20200518RCAriestaNo ratings yet
- Ocean Engineering: H. YasukawaDocument10 pagesOcean Engineering: H. YasukawaMaciej ReichelNo ratings yet
- The Inclining ExperimentDocument4 pagesThe Inclining ExperimentMDNo ratings yet
- Accident Report - Cargo Gear FailureDocument19 pagesAccident Report - Cargo Gear FailureSanto IskandarNo ratings yet
- English Maritime 04Document2 pagesEnglish Maritime 04Maddika BuaNo ratings yet
- The Inclining Experiment - Ascertain The GM of VesselDocument4 pagesThe Inclining Experiment - Ascertain The GM of VesselGiorgi KandelakiNo ratings yet
- 3.5 The Inclining ExperimentDocument1 page3.5 The Inclining ExperimentTruong NguyenNo ratings yet
- KT 07 PDFDocument7 pagesKT 07 PDFmusebladeNo ratings yet
- ID Studi Hull Form Kapal Barang Penumpang TDocument9 pagesID Studi Hull Form Kapal Barang Penumpang TJunaidin SoroNo ratings yet
- Swedish Club CasebookDocument80 pagesSwedish Club CasebookokandandinNo ratings yet
- Seam 2 Activity 2 MidtermDocument9 pagesSeam 2 Activity 2 MidtermCLIJOHN PABLO FORDNo ratings yet
- MARS Report No 368 June 2023 - 101053 - 065425Document4 pagesMARS Report No 368 June 2023 - 101053 - 065425Josu YoNo ratings yet
- Seam6-Midterms NotesDocument5 pagesSeam6-Midterms NotesOrewa madamada daneNo ratings yet
- Skin-to-Skin ReplenishmentDocument20 pagesSkin-to-Skin ReplenishmentIsaa JatuNo ratings yet
- Seamanship 2A ReviewerDocument8 pagesSeamanship 2A Reviewergemmarvillacastin712No ratings yet
- Course Keeping of High Speed Craft in Stern Quartering Seas - Quadvlieg, Van Walree, Keuning, Stambaugh 2009Document11 pagesCourse Keeping of High Speed Craft in Stern Quartering Seas - Quadvlieg, Van Walree, Keuning, Stambaugh 2009haujesNo ratings yet
- Safety Investigation Report: MV BozdagDocument12 pagesSafety Investigation Report: MV BozdagEfe CanNo ratings yet
- Lifeboat StationDocument6 pagesLifeboat StationJerome EncinaresNo ratings yet
- Initial Stability of Semi-Submersible Vessel During Floating Onload Without CargoDocument5 pagesInitial Stability of Semi-Submersible Vessel During Floating Onload Without CargoMahesh Kumar K BNo ratings yet
- Studi Hull Form Kapal Barang-Penumpang Tradisional Di Danau Toba Sumatera UtaraDocument9 pagesStudi Hull Form Kapal Barang-Penumpang Tradisional Di Danau Toba Sumatera UtaraaldandanalNo ratings yet
- STAB - 2009 - s04-p1 12000 DWT Bulk CarierDocument8 pagesSTAB - 2009 - s04-p1 12000 DWT Bulk CarierHUNG NIKKONo ratings yet
- Introduction To Parametric Rolling Motion Ver A4 PresentationDocument14 pagesIntroduction To Parametric Rolling Motion Ver A4 PresentationprianshNo ratings yet
- Cargo 1Document105 pagesCargo 1umut tunalıNo ratings yet
- Ship Handling During STS As A Combined UnitDocument24 pagesShip Handling During STS As A Combined UnitManuel Guerrero100% (2)
- Casebook2021 HatchcoversDocument5 pagesCasebook2021 Hatchcoversrasit dulgerNo ratings yet
- Informative Guide About Bulk and Grain CargoesDocument16 pagesInformative Guide About Bulk and Grain CargoesKen Portugalete100% (2)
- Jurnal 43Document9 pagesJurnal 43fikri aryantoNo ratings yet
- MARS Report No 371 September 2023 - 101123 - 065627Document4 pagesMARS Report No 371 September 2023 - 101123 - 065627Josu YoNo ratings yet
- Loss Prevention Bulletin Naiko Class Vol.4 - Ship Maneuvering Technical ReferenceDocument78 pagesLoss Prevention Bulletin Naiko Class Vol.4 - Ship Maneuvering Technical ReferenceHerlambang Miracle Yudhian100% (1)
- Villare, Aljon - Final-Reasearch-Work-Week-13-Week-16Document34 pagesVillare, Aljon - Final-Reasearch-Work-Week-13-Week-16Angel Florence V. VillareNo ratings yet
- The Impactof Sloshing Liquidson Ship Stabilityfor Various Dimensionsof Partly FilledDocument10 pagesThe Impactof Sloshing Liquidson Ship Stabilityfor Various Dimensionsof Partly FilledFawwaz MananNo ratings yet
- Optimasi Respon Gerakan Kapal Ikan Catamaran TerhaDocument10 pagesOptimasi Respon Gerakan Kapal Ikan Catamaran TerhaNoveta FernaldinatanNo ratings yet
- Ship StressesDocument7 pagesShip StressesSumit Sinha50% (2)
- Small Fish Boat Stability: A Case Study: George A. Lundgren I and Richard L. Storch 2Document6 pagesSmall Fish Boat Stability: A Case Study: George A. Lundgren I and Richard L. Storch 2Jesus ChonNo ratings yet
- 2001 - Uss Cheyenne SSN 773Document3 pages2001 - Uss Cheyenne SSN 773spmtawi lsmaipawiNo ratings yet
- Analisa Pengaruh Penambahan Fin Stabilizer Terhadap Gerakan Rolling Dan Motion Sickness Incidence (Msi) Pada Km. Sabuk Nusantara 71Document5 pagesAnalisa Pengaruh Penambahan Fin Stabilizer Terhadap Gerakan Rolling Dan Motion Sickness Incidence (Msi) Pada Km. Sabuk Nusantara 71Ahmad MuhajirNo ratings yet
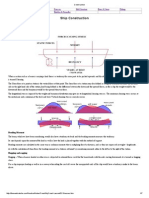
- Ship ConstructionDocument7 pagesShip Constructionpramodkb_cusatNo ratings yet
- Dry Docking OperationsDocument5 pagesDry Docking Operationshutsonianp100% (2)
- Stability Vigilance Containerships and Cargo Ships Carrying Containers Maritime MutualDocument9 pagesStability Vigilance Containerships and Cargo Ships Carrying Containers Maritime MutualCapt. Lakhi Narayan Mandal IMU Navi Mumbai CampusNo ratings yet
- Stability Booklet 1Document28 pagesStability Booklet 1Jose MartinsNo ratings yet
- A Guide To The Influence of Ground Reaction On Ship PDFDocument12 pagesA Guide To The Influence of Ground Reaction On Ship PDFamr_tarek_26No ratings yet
- Optimasi Respon Gerakan Kapal Ikan Catamaran Terhafdap Gelombang Reguller RomadhoniDocument11 pagesOptimasi Respon Gerakan Kapal Ikan Catamaran Terhafdap Gelombang Reguller RomadhoniAnkiq MaqapagalNo ratings yet
- Dynamics of Ships Running Aground: Marine Science and TechnologyDocument9 pagesDynamics of Ships Running Aground: Marine Science and Technologyamr_tarek_26No ratings yet
- Os 105 Vessels and Transport To OffshoreDocument18 pagesOs 105 Vessels and Transport To OffshoreDerlin prince ThankarajNo ratings yet
- George Lang Ship Maneuvering HE00195Document4 pagesGeorge Lang Ship Maneuvering HE00195George BurkleyNo ratings yet
- RT130 RCI Calibration ProcessDocument6 pagesRT130 RCI Calibration ProcessAlan Martin De La Cruz VazquezNo ratings yet
- Cloud Pentesting CheatsheetDocument22 pagesCloud Pentesting CheatsheetLuis De Santana100% (1)
- Make Your Own PCBs Form A To ZDocument17 pagesMake Your Own PCBs Form A To Zbaliza1405No ratings yet
- PDF Induction Machines Handbook Steady State Modeling and Performance 3Rd Edition Ion Boldea Author Ebook Full ChapterDocument53 pagesPDF Induction Machines Handbook Steady State Modeling and Performance 3Rd Edition Ion Boldea Author Ebook Full Chapterjimmie.powers966100% (4)
- Oxford Business English For Human ResourDocument1 pageOxford Business English For Human ResourАнастасия РезановаNo ratings yet
- ImmuniWeb Website Security Test Report - Website Lldikti4Document13 pagesImmuniWeb Website Security Test Report - Website Lldikti4Hilfan SoeltansyahNo ratings yet
- Session 3 - English ViDocument18 pagesSession 3 - English ViEvelyn VivianaNo ratings yet
- Gitam UniversityDocument100 pagesGitam UniversityvicterpaulNo ratings yet
- ExportDocument186 pagesExporting_madeNo ratings yet
- CE 441 Foundation Engineering 05 07 2019Document216 pagesCE 441 Foundation Engineering 05 07 2019Md. Azizul Hakim100% (1)
- AuditingDocument47 pagesAuditingImran Alam ChowdhuryNo ratings yet
- Operation Manual: Inmarsat-C Mobile Earth StationDocument203 pagesOperation Manual: Inmarsat-C Mobile Earth StationPaul Lucian VentelNo ratings yet
- CCAWV Members Vote NO 2014 Salary HikeDocument4 pagesCCAWV Members Vote NO 2014 Salary HikeKyle LangsleyNo ratings yet
- Impact of COVID-19 in Education SectorDocument9 pagesImpact of COVID-19 in Education SectorIJRASETPublicationsNo ratings yet
- Levich Ch11 Net Assignment SolutionsDocument16 pagesLevich Ch11 Net Assignment SolutionsNisarg JoshiNo ratings yet
- CDDocument49 pagesCDAntony SantosNo ratings yet
- Brochure B1510-50Hz Horizontal - Inline Selection Rev 12-14-06Document14 pagesBrochure B1510-50Hz Horizontal - Inline Selection Rev 12-14-06احمد الجزار2007No ratings yet
- The Tiebout Model at Fifty, Ed. W.A. Fischel. Cambridge,: JEL ClassificationsDocument500 pagesThe Tiebout Model at Fifty, Ed. W.A. Fischel. Cambridge,: JEL ClassificationsJohnny Castillo SerapionNo ratings yet
- Arcaina Case DigestDocument2 pagesArcaina Case DigestYodh Jamin Ong100% (1)
- BSBLDR401 Task2Document13 pagesBSBLDR401 Task2Winnie PPnapatNo ratings yet
- COMSATS University Islamabad Lahore Campus: Midterm Terminal Examination - Fall 2021Document9 pagesCOMSATS University Islamabad Lahore Campus: Midterm Terminal Examination - Fall 2021NABEEL AHMADNo ratings yet
- RSTI-59 e 69Document4 pagesRSTI-59 e 69Guilherme VillaçaNo ratings yet
- 1987 - Spin Trapping - Esr Parameters of Spin AdductsDocument45 pages1987 - Spin Trapping - Esr Parameters of Spin AdductsLili LilithNo ratings yet
- AZ-900 Prepaway Premium Exam 154qDocument96 pagesAZ-900 Prepaway Premium Exam 154qAnshul AakotkarNo ratings yet
- 4D Seismic in A Heavy-Oil, Turbidite Reservoir Offshore BrazilDocument10 pages4D Seismic in A Heavy-Oil, Turbidite Reservoir Offshore BrazilVidho TomodachiNo ratings yet
- Non-Uniform Day: What You'll NeedDocument2 pagesNon-Uniform Day: What You'll NeedIqra RaufNo ratings yet
- Jaramil vs. CA DigestDocument1 pageJaramil vs. CA DigestJoseph MacalintalNo ratings yet