You might also like
- Machine Learning Algorithms for Data Scientists: An OverviewFrom EverandMachine Learning Algorithms for Data Scientists: An OverviewNo ratings yet
- 3606-Article Text-6772-1-10-20210422Document14 pages3606-Article Text-6772-1-10-20210422hello smiNo ratings yet
- Inpainting and Denoising ChallengesFrom EverandInpainting and Denoising ChallengesSergio EscaleraNo ratings yet
- Face Recognition Using Principal Component Analysis and Artificial Neural Network of Facial Images Datasets in Soft ComputingDocument7 pagesFace Recognition Using Principal Component Analysis and Artificial Neural Network of Facial Images Datasets in Soft ComputingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Final Documentation 9Document69 pagesFinal Documentation 9Pradeep VictoryNo ratings yet
- Age and Gender-2Document16 pagesAge and Gender-2SriragaNo ratings yet
- Gen742 Ca1Document3 pagesGen742 Ca1Anchal SharmaNo ratings yet
- Capstone Review 2Document6 pagesCapstone Review 2Ranjith RioNo ratings yet
- Generative Adversarial Networks (Gans) : An Overview of Theoretical Model, Evaluation Metrics, and Recent DevelopmentsDocument17 pagesGenerative Adversarial Networks (Gans) : An Overview of Theoretical Model, Evaluation Metrics, and Recent DevelopmentsMikeNo ratings yet
- Fraudulent Face Image Detection: ICACC-2020Document7 pagesFraudulent Face Image Detection: ICACC-2020silver smurfNo ratings yet
- Thesis Facial Expression RecognitionDocument4 pagesThesis Facial Expression Recognitionangiejorgensensaltlakecity100% (1)
- Human Face Detection and Identification of Facial Expressions Using MATLABDocument8 pagesHuman Face Detection and Identification of Facial Expressions Using MATLABNIET Journal of Engineering & Technology(NIETJET)No ratings yet
- Fake Face Detection Using CNNDocument6 pagesFake Face Detection Using CNNIJRASETPublicationsNo ratings yet
- Enhancing Face Identification Using Local Binary Patterns and K-Nearest NeighborsDocument12 pagesEnhancing Face Identification Using Local Binary Patterns and K-Nearest NeighborsNancyNo ratings yet
- Visualsentimentanalysis - Deeplearning - Applsci 12 01030 With CoverDocument24 pagesVisualsentimentanalysis - Deeplearning - Applsci 12 01030 With Covermalissia2092No ratings yet
- Abstract:: 1.topic Modelling On Instagram Hashtags: An Alternative Way To Automatic Image Annotation AuthorsDocument4 pagesAbstract:: 1.topic Modelling On Instagram Hashtags: An Alternative Way To Automatic Image Annotation AuthorsAngad SinghNo ratings yet
- Unsupervised Learning by GANDocument3 pagesUnsupervised Learning by GANMahmood RehanNo ratings yet
- Classification Technique For Real-Time Emotion Detection Using Machine Learning ModelsDocument9 pagesClassification Technique For Real-Time Emotion Detection Using Machine Learning ModelsIAES IJAINo ratings yet
- Detection of Eloped Juvenile Using AIDocument5 pagesDetection of Eloped Juvenile Using AIInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Face Recognization: A Review: International Journal of Application or Innovation in Engineering & Management (IJAIEM)Document3 pagesFace Recognization: A Review: International Journal of Application or Innovation in Engineering & Management (IJAIEM)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Survey On Image Forgery Detection Using Machine Learning ClassifierDocument4 pagesSurvey On Image Forgery Detection Using Machine Learning ClassifierIJRASETPublicationsNo ratings yet
- A Tour of Unsupervised Deep Learning For Medical Image AnalysisDocument29 pagesA Tour of Unsupervised Deep Learning For Medical Image AnalysisLandon GrayNo ratings yet
- Deep L EarningDocument7 pagesDeep L Earningheleneraj21No ratings yet
- ManishGiri G 2018465 34Document12 pagesManishGiri G 2018465 34Manish GiriNo ratings yet
- Face Recognition Using Neural NetworkDocument31 pagesFace Recognition Using Neural Networkvishnu vNo ratings yet
- COVID-19 Digital X-Rays Forgery Classification Model Using Deep LearningDocument7 pagesCOVID-19 Digital X-Rays Forgery Classification Model Using Deep LearningIAES IJAINo ratings yet
- Explainable Artificial Intelligence How Face Masks Are Detected Via Deep Neural NetworksDocument9 pagesExplainable Artificial Intelligence How Face Masks Are Detected Via Deep Neural NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Identification of Identical Twins Using Face Recognition With ResultsDocument6 pagesIdentification of Identical Twins Using Face Recognition With ResultsEditor IJRITCCNo ratings yet
- Facial Recognition With Face Regions by Machine Learning ReviewDocument5 pagesFacial Recognition With Face Regions by Machine Learning ReviewIJRASETPublicationsNo ratings yet
- Emotion Detection For Hotel Industry Feedback System Using Machine LearningDocument8 pagesEmotion Detection For Hotel Industry Feedback System Using Machine LearningIJRASETPublicationsNo ratings yet
- Face Recognition Research PaperDocument6 pagesFace Recognition Research PaperLearn SamadeshNo ratings yet
- Age and Gender Prediction For Better Marketing StrategiesDocument23 pagesAge and Gender Prediction For Better Marketing StrategiesManoj SurnamNo ratings yet
- Review of Face Detection Systems Based Artificial Neural Networks AlgorithmsDocument16 pagesReview of Face Detection Systems Based Artificial Neural Networks AlgorithmsIJMAJournalNo ratings yet
- Face Recognition Using Contour MatchingDocument8 pagesFace Recognition Using Contour MatchingflyinzeskyNo ratings yet
- Fake News Detection Using Deep LearningDocument6 pagesFake News Detection Using Deep LearningNIET Journal of Engineering & Technology(NIETJET)No ratings yet
- Prediction Analysis Techniques of Data MDocument8 pagesPrediction Analysis Techniques of Data MNavAhmedNo ratings yet
- Research Proposal AzeemDocument10 pagesResearch Proposal AzeemمحمدعظیمچوھدریNo ratings yet
- Facial Expressions RecognitionDocument16 pagesFacial Expressions RecognitionRamon BrenaNo ratings yet
- Facial Recognition Attendance System Using Deep LearningDocument9 pagesFacial Recognition Attendance System Using Deep LearningIJRASETPublicationsNo ratings yet
- Image ManipulationDocument16 pagesImage ManipulationAditya SharmaNo ratings yet
- Face Recognition Attack ArtDocument21 pagesFace Recognition Attack ArtHowTo HackNo ratings yet
- General Purpose Image Tampering Detection Using Convolutional Neural Network and Local Optimal Oriented Pattern (Loop)Document20 pagesGeneral Purpose Image Tampering Detection Using Convolutional Neural Network and Local Optimal Oriented Pattern (Loop)sipijNo ratings yet
- An Efficient Face Recognition System by Declining Rejection Rate Using PcaDocument6 pagesAn Efficient Face Recognition System by Declining Rejection Rate Using PcaIjesat JournalNo ratings yet
- Second Review FinalDocument19 pagesSecond Review FinalVITHAL BABLENo ratings yet
- Developing A Face Recognition System Using Convolutional Neural Network and Raspberry Pi Including Facial ExpressionDocument13 pagesDeveloping A Face Recognition System Using Convolutional Neural Network and Raspberry Pi Including Facial ExpressionHuzaifa TahirNo ratings yet
- Applsci 10 00370 v2Document14 pagesApplsci 10 00370 v2chaitulukkaNo ratings yet
- People Counting in Crowd Faster R-CNNDocument9 pagesPeople Counting in Crowd Faster R-CNNIJRASETPublicationsNo ratings yet
- A Gender Recognition System From Facial ImageDocument10 pagesA Gender Recognition System From Facial Imageahtasham hussainNo ratings yet
- IJCRT22A6701Document8 pagesIJCRT22A6701shital shermaleNo ratings yet
- Journal of Data MiningDocument11 pagesJournal of Data MiningUma PrasadNo ratings yet
- Proceedings of Spie: A Survey On Generative Adversarial Networks and Their Variants MethodsDocument8 pagesProceedings of Spie: A Survey On Generative Adversarial Networks and Their Variants Methodswilliamkin14No ratings yet
- RefinedSynopsisFormat 2021-22Document10 pagesRefinedSynopsisFormat 2021-22Kiran Yadav SNo ratings yet
- Kci Fi002914168Document10 pagesKci Fi002914168studyyuyeon0707No ratings yet
- Facial Recognition Using Machine LearningDocument21 pagesFacial Recognition Using Machine LearningNithishNo ratings yet
- Clustering-Aided Multi-View Classification: A Case Study On Android Malware DetectionDocument26 pagesClustering-Aided Multi-View Classification: A Case Study On Android Malware DetectionElie El RifNo ratings yet
- Comparative Analysis of PCA and 2DPCA in Face RecognitionDocument7 pagesComparative Analysis of PCA and 2DPCA in Face RecognitionDinh Khai LaiNo ratings yet
- SOM and PCA Approach For Face Recognition - A SurveyDocument6 pagesSOM and PCA Approach For Face Recognition - A Surveysurendiran123No ratings yet
- Human Emotions Reader by Medium of Digital Image ProcessingDocument8 pagesHuman Emotions Reader by Medium of Digital Image ProcessingAKULA AIT20BEAI046No ratings yet
- Support Vector Machine SVM For Medical IDocument9 pagesSupport Vector Machine SVM For Medical INEHA BHATINo ratings yet
- Stock Market Prediction Using Reinforcement Learning With Sentiment AnalysisDocument20 pagesStock Market Prediction Using Reinforcement Learning With Sentiment AnalysisJames MorenoNo ratings yet
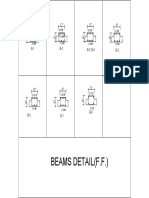
- Beam DetailDocument1 pageBeam DetailHitesh VishalNo ratings yet
- Unctional Equirements OcumentDocument14 pagesUnctional Equirements OcumentHitesh VishalNo ratings yet
- Itr 4 Sugam - Indian Income Tax Return: Acknowledgement Number: 856838440220819 Assessment Year: 2019-20Document8 pagesItr 4 Sugam - Indian Income Tax Return: Acknowledgement Number: 856838440220819 Assessment Year: 2019-20Hitesh VishalNo ratings yet
- Itr-1 Sahaj Indian Income Tax Return: Acknowledgement Number: 787227030061220 Assessment Year: 2020-21Document7 pagesItr-1 Sahaj Indian Income Tax Return: Acknowledgement Number: 787227030061220 Assessment Year: 2020-21Hitesh VishalNo ratings yet
- Esocial - S-1200 - Update of Events in 2.5 Layout VersionDocument3 pagesEsocial - S-1200 - Update of Events in 2.5 Layout VersionOwlie AquilaNo ratings yet
- GM 5L40E Automatic Diagrams and ListDocument9 pagesGM 5L40E Automatic Diagrams and ListBrayan Aragon diego100% (1)
- High MP Load in RNC 3820 - Part1Document6 pagesHigh MP Load in RNC 3820 - Part1SM SohelozzamanNo ratings yet
- Recovering Windows XPDocument43 pagesRecovering Windows XPdavid_kuberaNo ratings yet
- Performance Analysis of Efficient and Low Complexity MIMO-OFDM Using STBC and V-BLASTDocument66 pagesPerformance Analysis of Efficient and Low Complexity MIMO-OFDM Using STBC and V-BLASTDheeksha ReddyNo ratings yet
- U-336S User's Manual: ZyxelDocument159 pagesU-336S User's Manual: ZyxelJuan Diaz del VallinNo ratings yet
- OptiSystem 7.0 Release NotesDocument3 pagesOptiSystem 7.0 Release NotesRonald SaavedraNo ratings yet
- AI and Robotics IBA GEI April 2017Document120 pagesAI and Robotics IBA GEI April 2017Harsh VoraNo ratings yet
- Certified Information Systems Auditor (CISA) 2019 Information System Auditing TranscriptDocument15 pagesCertified Information Systems Auditor (CISA) 2019 Information System Auditing TranscriptMahmoudAbdElGhaniNo ratings yet
- Light and Lighting - Lighting of Work Places - Part 1: Indoor Work PlacesDocument9 pagesLight and Lighting - Lighting of Work Places - Part 1: Indoor Work Placesrakib.techlinkNo ratings yet
- Technology TransferDocument8 pagesTechnology TransfersandeepNo ratings yet
- As PF700S2 PositionFollowerDocument4 pagesAs PF700S2 PositionFollowerWilliam moreNo ratings yet
- Jlpt n5公式問題集 PDFDocument1 pageJlpt n5公式問題集 PDFShiaoying LeongNo ratings yet
- Sheetcam Manual EspañolDocument2 pagesSheetcam Manual Españolnellacazorla50% (2)
- S. No. Name Test/Lab Onsite DateDocument11 pagesS. No. Name Test/Lab Onsite Daterajat.telecomNo ratings yet
- Application of Hidden Markov Model On Car Sensors For Detecting Drunk DriversDocument6 pagesApplication of Hidden Markov Model On Car Sensors For Detecting Drunk DriversselbalNo ratings yet
- Artificial PassengerDocument15 pagesArtificial Passengerakinsoji ayomideNo ratings yet
- Wi-Fi 6 OFDMA App Notes 091319 WebDocument11 pagesWi-Fi 6 OFDMA App Notes 091319 WebAmir MasoodNo ratings yet
- Blockchain IITKDocument40 pagesBlockchain IITKBob BuilderNo ratings yet
- Diffentian Transformer ProtectionDocument227 pagesDiffentian Transformer ProtectionHuget St100% (3)
- Rycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Document67 pagesRycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Bob Laughlin, KWØRLNo ratings yet
- Job Description: Data Architect / Data Modeler Requisition ID: 15001465Document11 pagesJob Description: Data Architect / Data Modeler Requisition ID: 15001465Simon BoyoNo ratings yet
- Set Up The Web Apps at HomeDocument3 pagesSet Up The Web Apps at HomePETER GBLORSONo ratings yet
- Revolutionize Today'S Workspace: Multifunction, Color, Wireless Laser PrinterDocument8 pagesRevolutionize Today'S Workspace: Multifunction, Color, Wireless Laser PrinterNBS MarketingNo ratings yet
- CSAP Job Description ASE GeneralDocument2 pagesCSAP Job Description ASE GeneralYossi HassonNo ratings yet
- Rockwell Automation Teched ProgrammeDocument3 pagesRockwell Automation Teched ProgrammekphcmNo ratings yet
- Data Communications and Networks (IT-213) : Spring 2021Document9 pagesData Communications and Networks (IT-213) : Spring 2021sso640238No ratings yet
- TDA2003 BridgeDocument10 pagesTDA2003 BridgeMartinaxMgmNo ratings yet
- Fibre Raceway WebDocument12 pagesFibre Raceway WebKaja YusufNo ratings yet
- 24-Port 10/100/1000T 802.3at Poe + 4-Port Gigabit TP/SFP Combo Managed SwitchDocument9 pages24-Port 10/100/1000T 802.3at Poe + 4-Port Gigabit TP/SFP Combo Managed SwitchAzmey Azyz PratamaNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziFrom Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo ratings yet
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet