You might also like
- Transient-Response Analysis and Steady-State Error Analysis 1. The Transient Response of The Second-Order Systems 1.1Document5 pagesTransient-Response Analysis and Steady-State Error Analysis 1. The Transient Response of The Second-Order Systems 1.1prica_adrianNo ratings yet
- ST 10 PolarPlotsDocument7 pagesST 10 PolarPlotsPlayNo ratings yet
- Assignment 8 SolutionsDocument4 pagesAssignment 8 Solutionssafyh2005No ratings yet
- Solving Assignments in Tensor Analysis and Orbit EquationsDocument3 pagesSolving Assignments in Tensor Analysis and Orbit EquationsXamewayNo ratings yet
- EEE 151 Quiz Solutions Magnitude ResponseDocument2 pagesEEE 151 Quiz Solutions Magnitude ResponseChanie RamosNo ratings yet
- Gaussian Integral Proofs SummarizedDocument15 pagesGaussian Integral Proofs SummarizedTarun RahejaNo ratings yet
- Gaussian Integral ProofsDocument12 pagesGaussian Integral ProofsJoy MenezesNo ratings yet
- Lecture38 PDFDocument5 pagesLecture38 PDFNiyas PNo ratings yet
- Gain and Phase MarginsDocument5 pagesGain and Phase MarginsamitkallerNo ratings yet
- TS2 WK09-10 BUParkDocument50 pagesTS2 WK09-10 BUParkstatyoungNo ratings yet
- gamma functionDocument2 pagesgamma functionFrozenSpiritsNo ratings yet
- REFRACATION AND DISPERSION COEFFICIENTSDocument4 pagesREFRACATION AND DISPERSION COEFFICIENTSMridusmita BoruahNo ratings yet
- Gaussian IntegralDocument15 pagesGaussian Integral595250651No ratings yet
- Gaussian IntegralDocument15 pagesGaussian IntegralJuani RorNo ratings yet
- Accelerometer Frequency Response AnalysisDocument4 pagesAccelerometer Frequency Response AnalysisTrung PhanNo ratings yet
- MSM780 2021 StabilityEllipticModelEquationDocument6 pagesMSM780 2021 StabilityEllipticModelEquationMitchell WhitingNo ratings yet
- Fall 2011Document2 pagesFall 2011Robinson Ortega MezaNo ratings yet
- Chapters 1-11 Heat Transfer Numerical SolutionsDocument155 pagesChapters 1-11 Heat Transfer Numerical SolutionsAyush DeoreNo ratings yet
- Tutorial6 SolDocument4 pagesTutorial6 Soldhindsaharmanjatt2003No ratings yet
- Homework 8 - SolutionDocument8 pagesHomework 8 - SolutionMaricarmen GalvezaNo ratings yet
- Chi-square Distribution GuideDocument3 pagesChi-square Distribution GuideRAFID ISTAHADNo ratings yet
- Quantum Mechanics and The Hydrogen AtomDocument19 pagesQuantum Mechanics and The Hydrogen AtomIoan Paul PârleaNo ratings yet
- Multi IntegrationDocument48 pagesMulti IntegrationLourd John JoaquinNo ratings yet
- MATH2352 Differential Equations and Applications Name: Coursework 5 ID: Problem 1. Find The Laplace Transform of The Function F (T) 0 T 2 (T 2) T 2Document2 pagesMATH2352 Differential Equations and Applications Name: Coursework 5 ID: Problem 1. Find The Laplace Transform of The Function F (T) 0 T 2 (T 2) T 2John ChanNo ratings yet
- Liu Et Al-2018-Journal of Applied Econometrics - Sup-1Document9 pagesLiu Et Al-2018-Journal of Applied Econometrics - Sup-1Grant HeilemanNo ratings yet
- Polar Plot of Frequency ResponseDocument5 pagesPolar Plot of Frequency ResponseDilip GNo ratings yet
- Conway J. B. - Functions of One Complex Variable II (1995) ErrataDocument5 pagesConway J. B. - Functions of One Complex Variable II (1995) Erratamatiashernan123No ratings yet
- 7.2 Vorticity in Inviscid Rotating Uids - Taylor - Proudman TheoremDocument2 pages7.2 Vorticity in Inviscid Rotating Uids - Taylor - Proudman TheoremRatovoarisoaNo ratings yet
- Equation Manipulation: X V T+ at Show Your Derivation Here X V T+ atDocument2 pagesEquation Manipulation: X V T+ at Show Your Derivation Here X V T+ atCarlNo ratings yet
- GRAPHICAL REPRESENTATION OF TRANSFER FUNCTIONSDocument20 pagesGRAPHICAL REPRESENTATION OF TRANSFER FUNCTIONSFrancesco DonatoNo ratings yet
- Curves hw1Document2 pagesCurves hw1Anirudh NairNo ratings yet
- Exam 1 FormulaDocument2 pagesExam 1 FormulaKostas LiapisNo ratings yet
- L28 Bayseian Linear Regression Linchpin Sampler PDFDocument6 pagesL28 Bayseian Linear Regression Linchpin Sampler PDFAnanya AgarwalNo ratings yet
- Homework 6 Solutions: 1. Geometric PhaseDocument3 pagesHomework 6 Solutions: 1. Geometric PhaseAzina KhanNo ratings yet
- XPL 2.0 Module Exam 18 SolutionsDocument11 pagesXPL 2.0 Module Exam 18 Solutionsjustinakmanoj22No ratings yet
- a6474b32e25c000dec30c9a737ef0e05_MIT8_324F10_Lecture8Document6 pagesa6474b32e25c000dec30c9a737ef0e05_MIT8_324F10_Lecture8Ayham ziadNo ratings yet
- Intro2CFD Lecture1 Pulliam Intro SlidesDocument22 pagesIntro2CFD Lecture1 Pulliam Intro SlidesVladimir JovanovicNo ratings yet
- Find Mean and Variance of T DistributionDocument9 pagesFind Mean and Variance of T DistributionDuà Zàhrä RìzvîNo ratings yet
- Final PDFDocument13 pagesFinal PDFAlexandre Magno Bernardo FontouraNo ratings yet
- Differential Equations - Ordinary Differential Equations - First Order Linear EquationsDocument5 pagesDifferential Equations - Ordinary Differential Equations - First Order Linear EquationsMaxEconomicsNo ratings yet
- ECE45 HW3 SolutionsJDocument13 pagesECE45 HW3 SolutionsJDavid IonNo ratings yet
- Math 4023 Tutorial Notes 12Document3 pagesMath 4023 Tutorial Notes 12John ChanNo ratings yet
- Sheet 3Document2 pagesSheet 3Nguyễn Trà GiangNo ratings yet
- Freq ResponseDocument23 pagesFreq Responselili aboudNo ratings yet
- Formula Sheet GuideDocument15 pagesFormula Sheet GuideGavin BirlaNo ratings yet
- Radiative capture reactions: A theoretical overviewDocument46 pagesRadiative capture reactions: A theoretical overviewMohammed H. SalemNo ratings yet
- The Fourier Transform PDFDocument10 pagesThe Fourier Transform PDFVincent KiptanuiNo ratings yet
- ADI Discretization of N-S EquationsDocument3 pagesADI Discretization of N-S EquationsRysul KabirNo ratings yet
- Electromagnetic Theory II: Solution Set 7Due: 10 March 2021Document7 pagesElectromagnetic Theory II: Solution Set 7Due: 10 March 2021nicecountNo ratings yet
- Ali Raza Bio #01Document11 pagesAli Raza Bio #01Charsi 1080No ratings yet
- Goldstein Solutions Chapter 8Document8 pagesGoldstein Solutions Chapter 8AmnishNo ratings yet
- CML101 2020-21 I semester Minor 1 exam factsDocument4 pagesCML101 2020-21 I semester Minor 1 exam factsSarrahNo ratings yet
- Causal boundary of asymptotically simple space-timesDocument23 pagesCausal boundary of asymptotically simple space-timesdgaappNo ratings yet
- QFT 1Document12 pagesQFT 1Partha SahaNo ratings yet
- Asad Bio #1Document10 pagesAsad Bio #1Charsi 1080No ratings yet
- Lecture 2: Propagation of Light: Waves and PulsesDocument21 pagesLecture 2: Propagation of Light: Waves and PulsesZozza EdriesNo ratings yet
- Radial Functions and The Fourier Transform: 1 Area of A SphereDocument4 pagesRadial Functions and The Fourier Transform: 1 Area of A SphereLeonardo BossiNo ratings yet
- Tut Soln WhiteDocument95 pagesTut Soln WhiteShravani KodeNo ratings yet
- Week 4Document2 pagesWeek 4jeekfidNo ratings yet
- ST 07 ErrorAnalysisDocument5 pagesST 07 ErrorAnalysisprica_adrianNo ratings yet
- System Theory: Course 3 - The Laplace TransformationDocument14 pagesSystem Theory: Course 3 - The Laplace Transformationprica_adrianNo ratings yet
- Introduction To Control Systems Analysis 1. The Transfer Function 1.1Document7 pagesIntroduction To Control Systems Analysis 1. The Transfer Function 1.1prica_adrianNo ratings yet
- ST Curs02 Prezentare DynamicModelsDocument16 pagesST Curs02 Prezentare DynamicModelsprica_adrianNo ratings yet
- ST Curs01 Prezentare DynamicModelsDocument17 pagesST Curs01 Prezentare DynamicModelsprica_adrianNo ratings yet
- System Theory - Homework: 1 GuidelinesDocument3 pagesSystem Theory - Homework: 1 Guidelinesprica_adrianNo ratings yet
- Introduction To Control Systems Analysis 1. The Laplace TransformationDocument5 pagesIntroduction To Control Systems Analysis 1. The Laplace Transformationprica_adrianNo ratings yet
- Technical Drawing and Computer Graphics Technical Drawing and Computer GraphicsDocument38 pagesTechnical Drawing and Computer Graphics Technical Drawing and Computer Graphicsprica_adrianNo ratings yet
- MFC1NSDocument12 pagesMFC1NSprica_adrianNo ratings yet
- Technical Drawing and Computer Graphics Technical Drawing and Computer GraphicsDocument15 pagesTechnical Drawing and Computer Graphics Technical Drawing and Computer Graphicsprica_adrianNo ratings yet
- Object-Oriented Programming: - Until Now, The Programming You HaveDocument31 pagesObject-Oriented Programming: - Until Now, The Programming You Haveprica_adrianNo ratings yet
- Analyze Transient Response and Steady-State ErrorDocument4 pagesAnalyze Transient Response and Steady-State Errorprica_adrianNo ratings yet
- Introduction To Control Systems Analysis 1. Theorems of The Laplace Transformation 1.1Document7 pagesIntroduction To Control Systems Analysis 1. Theorems of The Laplace Transformation 1.1prica_adrianNo ratings yet
- Spatial Curves: Radu MiculescuDocument54 pagesSpatial Curves: Radu Miculescuprica_adrianNo ratings yet
- Automatic Control Collection of FormulaeDocument18 pagesAutomatic Control Collection of Formulaeprica_adrianNo ratings yet
- Vector Operators and Plane Curves ExplainedDocument47 pagesVector Operators and Plane Curves Explainedprica_adrianNo ratings yet
- Curs 13 ALGAD PDFDocument102 pagesCurs 13 ALGAD PDFprica_adrianNo ratings yet
- The Plane Through Three Points: R Such That MDocument70 pagesThe Plane Through Three Points: R Such That Mprica_adrianNo ratings yet
- Technical Drawing and Computer Graphics Technical Drawing and Computer GraphicsDocument38 pagesTechnical Drawing and Computer Graphics Technical Drawing and Computer Graphicsprica_adrianNo ratings yet
- Curs 10 ALGADDocument43 pagesCurs 10 ALGADprica_adrianNo ratings yet
- Matrices, Determinants and Linear Systems - II: Radu MiculescuDocument41 pagesMatrices, Determinants and Linear Systems - II: Radu Miculescuprica_adrianNo ratings yet
- The Space of Free Vectors: Radu MiculescuDocument43 pagesThe Space of Free Vectors: Radu Miculescuprica_adrianNo ratings yet
- Linear Transformations: Radu MiculescuDocument54 pagesLinear Transformations: Radu Miculescuprica_adrianNo ratings yet
- Vector spaces and Euclidian vector spaces overviewDocument50 pagesVector spaces and Euclidian vector spaces overviewprica_adrianNo ratings yet
- Matrices, Determinants and Linear Systems - II: Radu MiculescuDocument41 pagesMatrices, Determinants and Linear Systems - II: Radu Miculescuprica_adrianNo ratings yet
- 2 2 V RF G: The Line Generated by A Point and A DirectionDocument60 pages2 2 V RF G: The Line Generated by A Point and A Directionprica_adrianNo ratings yet
- Bilinear and Quadratic Forms: Radu MiculescuDocument42 pagesBilinear and Quadratic Forms: Radu Miculescuprica_adrianNo ratings yet
- 1 Applications of Differentiation: 1.1 Maximum and Minimum Values of FunctionsDocument7 pages1 Applications of Differentiation: 1.1 Maximum and Minimum Values of Functionsprica_adrianNo ratings yet
- RCS England Trainees Guide To A Quality Improvement Project 2021Document17 pagesRCS England Trainees Guide To A Quality Improvement Project 2021Wee K WeiNo ratings yet
- Image Forgery DetectionDocument17 pagesImage Forgery DetectionanlemacoNo ratings yet
- Common Mistakes in Dimensional Calibration MethodsDocument16 pagesCommon Mistakes in Dimensional Calibration MethodssujudNo ratings yet
- List of Students Allotted in Open Elective Subjects (B. Tech and M. Tech (Dual Degree) Integrated MSc. - 4th Semester - Regular - 2018 - 19) - 2 PDFDocument26 pagesList of Students Allotted in Open Elective Subjects (B. Tech and M. Tech (Dual Degree) Integrated MSc. - 4th Semester - Regular - 2018 - 19) - 2 PDFArpan JaiswalNo ratings yet
- FLIR Blackfly Users ManualDocument53 pagesFLIR Blackfly Users ManualPavan Kumar BittuNo ratings yet
- EU Food Label GuidanceDocument99 pagesEU Food Label GuidanceMunteanu CristianNo ratings yet
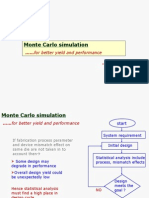
- Cadence Monte Carlo Simulation TutorialDocument51 pagesCadence Monte Carlo Simulation Tutorialkuomatt100% (1)
- Kyocera Servise ManualDocument613 pagesKyocera Servise ManualleukadiosNo ratings yet
- Taylors 10 Minute Diagnosis Manual Symptoms and Signs in The Time Limited Encounter PDFDocument656 pagesTaylors 10 Minute Diagnosis Manual Symptoms and Signs in The Time Limited Encounter PDF19marvoloNo ratings yet
- IQ 250/260 Transducer Quick Start GuideDocument2 pagesIQ 250/260 Transducer Quick Start GuideJoséEmmanuelCasasMunguíaNo ratings yet
- Radiological Investigations: UltrasonographyDocument42 pagesRadiological Investigations: UltrasonographyDeeptanu GhoshNo ratings yet
- Time Rates ExplainedDocument6 pagesTime Rates ExplainedAljohn Escalona100% (1)
- vCloudPoint Sharing Computing Solution Data Sheet PDFDocument8 pagesvCloudPoint Sharing Computing Solution Data Sheet PDFkus satria dNo ratings yet
- Jigoku Shoujo Eikyuu No SonzaiDocument166 pagesJigoku Shoujo Eikyuu No Sonzaiapi-224188021No ratings yet
- Topic 7.1 - Discrete Energy and Radioactivity Formative Assessment NAMEDocument2 pagesTopic 7.1 - Discrete Energy and Radioactivity Formative Assessment NAMEGajendraNo ratings yet
- Model Question Paper and Solution 2022Document14 pagesModel Question Paper and Solution 2022R Y AnushNo ratings yet
- XR5 9 Element 5 Band Yagi 20-17-15-12-10MDocument16 pagesXR5 9 Element 5 Band Yagi 20-17-15-12-10Msboonuy331No ratings yet
- z1875 Caton (BMJ) Electric Currents of The BrainDocument23 pagesz1875 Caton (BMJ) Electric Currents of The BrainUnholy VladNo ratings yet
- MX 201110 enDocument1,203 pagesMX 201110 envajrahastaNo ratings yet
- A History of The Jewish People in The Time of Jesus Christ (1891) Index Schürer, Emil, 1844-1910Document132 pagesA History of The Jewish People in The Time of Jesus Christ (1891) Index Schürer, Emil, 1844-1910David Bailey100% (2)
- Confined Space Entry: OSHA Standard 1910.146Document38 pagesConfined Space Entry: OSHA Standard 1910.146SKH CultureNo ratings yet
- The Picture of Dorian GrayDocument137 pagesThe Picture of Dorian GrayАнгелаС.No ratings yet
- 9709 s15 QP 12Document4 pages9709 s15 QP 12Abrar JahinNo ratings yet
- Hook and Eye-Stories Form The MarginsDocument220 pagesHook and Eye-Stories Form The MarginsJefferson LiinNo ratings yet
- Brochure - 2018 - Hitfact Mkii 2Document2 pagesBrochure - 2018 - Hitfact Mkii 2diaa ahmedNo ratings yet
- Differences in Left Ventricular and Left Atrial FuDocument10 pagesDifferences in Left Ventricular and Left Atrial FueugeniaNo ratings yet
- When Ceramic Sociology Meets Material SCDocument10 pagesWhen Ceramic Sociology Meets Material SCJosé Renato TeixeiraNo ratings yet
- BAlochistanDocument14 pagesBAlochistanzee100% (1)
- API 510 BasicsDocument40 pagesAPI 510 BasicsBalakumarNo ratings yet
- Let Us Discover: Hairdressing-Grade 11Document5 pagesLet Us Discover: Hairdressing-Grade 11cherry d.bandolaNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 4.5 out of 5 stars4.5/5 (20)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)