You might also like
- Wavelets and Subband Coding Solutions ManualDocument90 pagesWavelets and Subband Coding Solutions Manualwilliam_windsor100% (8)
- Lecture Notes On The Ellipsoid AlgorithmDocument8 pagesLecture Notes On The Ellipsoid AlgorithmAlex CorqueNo ratings yet
- Section A: Tutorial 1: Solutions: 28th February 2014Document4 pagesSection A: Tutorial 1: Solutions: 28th February 2014Kaushik NathNo ratings yet
- Solving Diffusion Equation Using Explicit SchemeDocument12 pagesSolving Diffusion Equation Using Explicit Schemekalyan.427656No ratings yet
- Examination of The Proof of Riemann's HypothesisDocument71 pagesExamination of The Proof of Riemann's HypothesisNikos MantzakourasNo ratings yet
- A New Integral Involving The Product of Bessel Functions and Associated Laguerre PolynomialsDocument5 pagesA New Integral Involving The Product of Bessel Functions and Associated Laguerre PolynomialsM. T. AttafNo ratings yet
- Volume of a region and average local maximaDocument8 pagesVolume of a region and average local maximaAzizah KusumaNo ratings yet
- Problem4 03Document2 pagesProblem4 03Fábio TakahashiNo ratings yet
- Solution To The American Mathematical Monthly Problem 11989Document3 pagesSolution To The American Mathematical Monthly Problem 11989vka kudryaNo ratings yet
- Parabolic 4Document5 pagesParabolic 4Sheba SYNo ratings yet
- A Generalization of Radon's Inequality: D M. B - G and O T. PDocument5 pagesA Generalization of Radon's Inequality: D M. B - G and O T. PFustei BogdanNo ratings yet
- BoS 2022 MX2 Trials - Q12 Solutions & Markers NotesDocument5 pagesBoS 2022 MX2 Trials - Q12 Solutions & Markers NotesasdcNo ratings yet
- Interesting Integral: SolutionDocument2 pagesInteresting Integral: SolutionJoseNo ratings yet
- Certain Classes of Series Associated With The Zeta Function and Multiple Gamma FunctionsDocument23 pagesCertain Classes of Series Associated With The Zeta Function and Multiple Gamma FunctionspuyoshitNo ratings yet
- On The Series Å K 1 (3kk) - 1k-nxkDocument11 pagesOn The Series Å K 1 (3kk) - 1k-nxkapi-26401608No ratings yet
- Solving Equations With e and LN X: B D B B FDocument4 pagesSolving Equations With e and LN X: B D B B FHuzaifa Ali KhanNo ratings yet
- Physics 451 Homework Solutions Ch 8 ProblemsDocument8 pagesPhysics 451 Homework Solutions Ch 8 ProblemsAjay Varma100% (5)
- Solving Equations With e and LN X: B D B B FDocument5 pagesSolving Equations With e and LN X: B D B B FAlex GramaNo ratings yet
- Trapezoidal RuleDocument2 pagesTrapezoidal RuleMaajith MarzookNo ratings yet
- IIT - PCM-2003 With Solutions PDFDocument32 pagesIIT - PCM-2003 With Solutions PDFShubham KumarNo ratings yet
- RandomDocument6 pagesRandomTytus MetryckiNo ratings yet
- 104 Spring 06 AnswDocument5 pages104 Spring 06 AnswJanry GarciaNo ratings yet
- Huang MVC GeneralDocument27 pagesHuang MVC GeneralgatzkeNo ratings yet
- First Upgrade On Conjecture 1 of SudakovDocument6 pagesFirst Upgrade On Conjecture 1 of Sudakov赵夏淼No ratings yet
- Combinatorics I: Hypergeometric Series and Gosper's AlgorithmDocument5 pagesCombinatorics I: Hypergeometric Series and Gosper's Algorithmvanaj123No ratings yet
- 11377-PDF File-44402-1-10-20230329Document10 pages11377-PDF File-44402-1-10-20230329Harold Hardy GodfreyNo ratings yet
- 2009 KeyDocument9 pages2009 KeySfg fghNo ratings yet
- Calculus Notes Full ModuleDocument212 pagesCalculus Notes Full ModuleAnnmariya SanthoshNo ratings yet
- MSexam Stat 2016F SolutionDocument11 pagesMSexam Stat 2016F SolutionRobinson Ortega MezaNo ratings yet
- The Gcd-Sum Function: Journal of Integer Sequences December 2001Document20 pagesThe Gcd-Sum Function: Journal of Integer Sequences December 2001John Vincent V MagulianoNo ratings yet
- Errata2Document3 pagesErrata2The Perfect Human BeingNo ratings yet
- Review Exercise 2: X Ty T X y T T T TDocument14 pagesReview Exercise 2: X Ty T X y T T T TI love YOUNo ratings yet
- MTH401 Assignment 1 Solution Spring 2022Document2 pagesMTH401 Assignment 1 Solution Spring 2022M.Faizan J1No ratings yet
- Purdue Basics SIGNALS AND SYSTEMSDocument4 pagesPurdue Basics SIGNALS AND SYSTEMSmdasifhassanapspdclNo ratings yet
- Differential Equations SolutionsDocument3 pagesDifferential Equations Solutions陳浚維No ratings yet
- 3 Telescope SolnsDocument3 pages3 Telescope Solnsr2ahmadNo ratings yet
- 2011-02-Elliptic Functions - Genesis of Theta Functions PDFDocument7 pages2011-02-Elliptic Functions - Genesis of Theta Functions PDFdawson zhaoNo ratings yet
- Error Estimates For The Gregory-Leibniz Series and The Alternating Harmonic Series Using Dalzell IntegralsDocument7 pagesError Estimates For The Gregory-Leibniz Series and The Alternating Harmonic Series Using Dalzell IntegralsDiego RattaggiNo ratings yet
- The Double Pendulum - Lagrangian Formulation - Diego AssencioDocument8 pagesThe Double Pendulum - Lagrangian Formulation - Diego AssencioAbril jimenezNo ratings yet
- Chapter 2Document10 pagesChapter 2Anonymous j817fgpimNo ratings yet
- KL ConvexityDocument8 pagesKL ConvexityBungo1No ratings yet
- 2011-02-Elliptic Functions - Fourier SeriesDocument4 pages2011-02-Elliptic Functions - Fourier Seriesdawson zhaoNo ratings yet
- 1 Deterministic Quicksort: Notes Cs:5360 Randomized AlgorithmsDocument5 pages1 Deterministic Quicksort: Notes Cs:5360 Randomized AlgorithmsMirza AbdullaNo ratings yet
- Practice Questions: Terry Lee Advanced MathematicsDocument3 pagesPractice Questions: Terry Lee Advanced MathematicsEren SevinceNo ratings yet
- Jacek Cicho N: BstractDocument6 pagesJacek Cicho N: BstractAnnisa FathiaNo ratings yet
- Jacek Cicho N: BstractDocument6 pagesJacek Cicho N: BstractAshutoshNo ratings yet
- Mathematical Constants-Errata - Steven R. Finch PDFDocument69 pagesMathematical Constants-Errata - Steven R. Finch PDFAndrés GranadosNo ratings yet
- Lecture 10 Legendre Eqn Part IIDocument9 pagesLecture 10 Legendre Eqn Part IIdev.user.1792No ratings yet
- Standard Deviation and Variance LectureDocument227 pagesStandard Deviation and Variance LectureAliNo ratings yet
- MATH 280: Applied Differential Equations Quiz 2 SolutionsDocument2 pagesMATH 280: Applied Differential Equations Quiz 2 Solutionsmohammed Al-basrawiNo ratings yet
- Math 4023 Tutorial Notes 12Document3 pagesMath 4023 Tutorial Notes 12John ChanNo ratings yet
- Mathematical Foundations of Computer Science Lecture OutlineDocument5 pagesMathematical Foundations of Computer Science Lecture OutlineChenyang FangNo ratings yet
- m51 3.1 The Derivative (Trigo & Inverse Trigo)Document16 pagesm51 3.1 The Derivative (Trigo & Inverse Trigo)Kian Rodriguez SchoolNo ratings yet
- 2021micro Hw2 AnsDocument4 pages2021micro Hw2 AnsDiana CarilloNo ratings yet
- MATH 115: Higher Order Derivatives Bonus ExampleDocument2 pagesMATH 115: Higher Order Derivatives Bonus ExampleDylan C. BeckNo ratings yet
- Test Bank For Discrete Mathematics With Applications 5th Edition Susanna S EppDocument22 pagesTest Bank For Discrete Mathematics With Applications 5th Edition Susanna S Eppernestocolonx88p100% (8)
- Japan Today's Calculation of Integral 2013Document6 pagesJapan Today's Calculation of Integral 2013paul taniwanNo ratings yet
- Transient-Response Analysis and Steady-State Error Analysis 1. The Transient Response of The Second-Order Systems 1.1Document5 pagesTransient-Response Analysis and Steady-State Error Analysis 1. The Transient Response of The Second-Order Systems 1.1prica_adrianNo ratings yet
- BookDocument370 pagesBookVarsha PoteNo ratings yet
- Y Fxy y y F Xy Y: Mathematical and Computational Applications, Vol. 17, No. 3, Pp. 203-211, 2012Document9 pagesY Fxy y y F Xy Y: Mathematical and Computational Applications, Vol. 17, No. 3, Pp. 203-211, 2012Ayush DeoreNo ratings yet
- Treatment Center PDFDocument120 pagesTreatment Center PDFShellyNo ratings yet
- 2020 - Ionic Liquid Promoted Extraction of Bitumen From Oil Sand - A ReviewDocument10 pages2020 - Ionic Liquid Promoted Extraction of Bitumen From Oil Sand - A ReviewAyush DeoreNo ratings yet
- IPR and Laws (HUT4201)Document2 pagesIPR and Laws (HUT4201)Ayush DeoreNo ratings yet
- Engg.& Solid Mechanic (EST4201)Document1 pageEngg.& Solid Mechanic (EST4201)Ayush DeoreNo ratings yet
- WHO 2019 nCoV SARI - Toolkit 2020.1 Eng PDFDocument196 pagesWHO 2019 nCoV SARI - Toolkit 2020.1 Eng PDFbeny nurjaman100% (1)
- WHO 2019 nCoV IPC HomeCare 2020.4 Eng PDFDocument9 pagesWHO 2019 nCoV IPC HomeCare 2020.4 Eng PDFAyush DeoreNo ratings yet
- Springer Text Books: S.No. Book Title Author Edition OpenurlDocument21 pagesSpringer Text Books: S.No. Book Title Author Edition OpenurlGustavo ReyesNo ratings yet
- Treatment Center PDFDocument120 pagesTreatment Center PDFShellyNo ratings yet
- Isobaric Vapor Liquid Equilibrium For Binary Systems of Cyclohexanone + Benzene, Cyclohexanone + Toluene, and Cyclohexanone + P Xylene at 101.3 KpaDocument7 pagesIsobaric Vapor Liquid Equilibrium For Binary Systems of Cyclohexanone + Benzene, Cyclohexanone + Toluene, and Cyclohexanone + P Xylene at 101.3 KpaAyush DeoreNo ratings yet
- Volume Increases 1,600 Times.: Furnace Boiler ProperDocument17 pagesVolume Increases 1,600 Times.: Furnace Boiler ProperAyush DeoreNo ratings yet
- WHO 2019 nCoV IPC HomeCare 2020.4 Eng PDFDocument9 pagesWHO 2019 nCoV IPC HomeCare 2020.4 Eng PDFAyush DeoreNo ratings yet
- WHO 2019 nCoV SARI - Toolkit 2020.1 Eng PDFDocument196 pagesWHO 2019 nCoV SARI - Toolkit 2020.1 Eng PDFbeny nurjaman100% (1)
- Electrical Engineering Fundamentals - V. Del Toro PDFDocument62 pagesElectrical Engineering Fundamentals - V. Del Toro PDFRawat Heera21% (14)
- 1 Sum and Count FamilyDocument8 pages1 Sum and Count FamilyAyush DeoreNo ratings yet
- Group E - JCP2Document14 pagesGroup E - JCP2Ayush DeoreNo ratings yet
- Catalytic Chemistry by Bruce C. Gates Wi PDFDocument2 pagesCatalytic Chemistry by Bruce C. Gates Wi PDFAyush DeoreNo ratings yet
- Momentum Transfer T1 PDFDocument5 pagesMomentum Transfer T1 PDFAyush DeoreNo ratings yet
- 3 Sort and FilterDocument90 pages3 Sort and FilterAyush DeoreNo ratings yet
- Gama BetaDocument12 pagesGama BetaAyush DeoreNo ratings yet
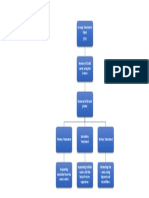
- Flow DiagramDocument1 pageFlow DiagramAyush DeoreNo ratings yet
- (Refereed) (Received May 4,) 988)Document12 pages(Refereed) (Received May 4,) 988)Ayush DeoreNo ratings yet
- 18che640 (Output Spyder)Document7 pages18che640 (Output Spyder)Ayush DeoreNo ratings yet
- Citation 5991902Document1 pageCitation 5991902Ayush DeoreNo ratings yet
- Physics: Fiji Year 12 Certificate Examination 2018Document16 pagesPhysics: Fiji Year 12 Certificate Examination 2018Rahul NarayanNo ratings yet
- FINEMarine FAQDocument62 pagesFINEMarine FAQAnson Novendra100% (1)
- Static Electricity WorksheetDocument6 pagesStatic Electricity WorksheetnaylinaungNo ratings yet
- Dead Sea MaskDocument14 pagesDead Sea MaskNurliana MohdNo ratings yet
- SASW Tests Determine Layer ProfilesDocument2 pagesSASW Tests Determine Layer ProfilesPrantik MaityNo ratings yet
- 8 Momentum PrincipleDocument15 pages8 Momentum PrincipleSteven KuaNo ratings yet
- What Is Force (Forces Concept Map) L v1 Xz0 s1Document7 pagesWhat Is Force (Forces Concept Map) L v1 Xz0 s1Inform7105No ratings yet
- M June 2014 Paper 4 Questions 41Document4 pagesM June 2014 Paper 4 Questions 41Wendell LuNo ratings yet
- Topic10 SeismicDesignofSteelStructuresHandoutsDocument20 pagesTopic10 SeismicDesignofSteelStructuresHandoutsrk6482No ratings yet
- Republic of the Philippines State University Materials & Processes Chapter on PropertiesDocument9 pagesRepublic of the Philippines State University Materials & Processes Chapter on PropertiesRoderick VillanuevaNo ratings yet
- TARCOG Mathematical Models for Calculating Thermal Performance of Glazing SystemsDocument56 pagesTARCOG Mathematical Models for Calculating Thermal Performance of Glazing Systemsaaro_oraalNo ratings yet
- Earthqui IS CODE 1893Document41 pagesEarthqui IS CODE 1893Santosh PotdarNo ratings yet
- Torsion: Eng. Rehab Hamza T.A at Cairo University, Faculty of EngineeringDocument14 pagesTorsion: Eng. Rehab Hamza T.A at Cairo University, Faculty of EngineeringSherry WagehNo ratings yet
- Colorado School of Mines CHEN403 Stirred Tank Heater Developing Transfer Functions From Heat & Material BalancesDocument8 pagesColorado School of Mines CHEN403 Stirred Tank Heater Developing Transfer Functions From Heat & Material BalancesSatria WijayaNo ratings yet
- GFM Lab ReportDocument102 pagesGFM Lab ReportÁlvaroDeLaGarza100% (1)
- IS 1893: 2002,2016 - CRITERIA For Earthquake Resistant Design of StructuresDocument29 pagesIS 1893: 2002,2016 - CRITERIA For Earthquake Resistant Design of Structuresparam2189No ratings yet
- Fluid Flow Through CrackDocument14 pagesFluid Flow Through CrackAnwar PariyarathNo ratings yet
- Steady Magnetic FieldDocument16 pagesSteady Magnetic FieldMohamed ZekoNo ratings yet
- R5310304 Kinematics of MachineryDocument2 pagesR5310304 Kinematics of MachinerysivabharathamurthyNo ratings yet
- Damped Oscillations and Mechanical Waves: General Physics 1: Grade 12Document10 pagesDamped Oscillations and Mechanical Waves: General Physics 1: Grade 12jessNo ratings yet
- Speed vs. Power Jumpers in High JumpDocument10 pagesSpeed vs. Power Jumpers in High JumpDominique Delannoy100% (1)
- Compact Heat Exchangers, Second EditionDocument142 pagesCompact Heat Exchangers, Second Editionchris2paul-3100% (1)
- ME1251-Heat and Mass TransferDocument11 pagesME1251-Heat and Mass Transfermanoj kumar GNo ratings yet
- Effective Stress and PermeabilityDocument97 pagesEffective Stress and Permeabilityanon_917763370No ratings yet
- Dynamics - Assignment 2Document3 pagesDynamics - Assignment 2Kirk Daniel ObregonNo ratings yet
- Advanced Site Specific Analysis of Skirted Spudcans in The View of North Sea ExperiencesDocument23 pagesAdvanced Site Specific Analysis of Skirted Spudcans in The View of North Sea ExperiencesgulinNo ratings yet
- CHE3161 Week1NotesDocument59 pagesCHE3161 Week1NotesJerry YueNo ratings yet
- EGR280 Mechanics 3Document2 pagesEGR280 Mechanics 3juanNo ratings yet
- ELE302 - PreLab 3Document21 pagesELE302 - PreLab 3hughjass39.99No ratings yet
- Variation of Physical ConstantsDocument2 pagesVariation of Physical ConstantsArini HerdayantiNo ratings yet