You might also like
- Poly-Phase Energy Metering IC Application NoteDocument36 pagesPoly-Phase Energy Metering IC Application Notegem1144aaNo ratings yet
- Finite State MachinesDocument32 pagesFinite State Machinesgem1144aaNo ratings yet
- Complementarity For Datasheet: 1 OutlineDocument3 pagesComplementarity For Datasheet: 1 Outlinegem1144aaNo ratings yet
- IDT 90E3xAN645Eng APN 20110921Document1 pageIDT 90E3xAN645Eng APN 20110921gem1144aaNo ratings yet
- Intel Flash Memory For The Embedded MarketDocument3 pagesIntel Flash Memory For The Embedded Marketgem1144aaNo ratings yet
- Usb Hid 1Document97 pagesUsb Hid 1api-3813333100% (2)
- Intel Flash Memory: Embedded Competitive Product Conversion GuideDocument2 pagesIntel Flash Memory: Embedded Competitive Product Conversion Guidegem1144aaNo ratings yet
- Euroquartz - 16.384MHZ 49usmx-30-50-40-18pf-AtfDocument1 pageEuroquartz - 16.384MHZ 49usmx-30-50-40-18pf-Atfgem1144aaNo ratings yet
- Ds1307 RTCDocument12 pagesDs1307 RTCAlex SantosNo ratings yet
- DS1302 DatasheetDocument14 pagesDS1302 Datasheetbulletproof_1987No ratings yet
- DsPIC Filter Design Sell Sheet - 51438bDocument2 pagesDsPIC Filter Design Sell Sheet - 51438beinkatzeNo ratings yet
- dsPIC30F To PIC24H Conversion GuidelinesDocument8 pagesdsPIC30F To PIC24H Conversion Guidelinesgem1144aaNo ratings yet
- Tips For c18Document12 pagesTips For c18Bodhibrata MukhopadhyayNo ratings yet
- BT151Document7 pagesBT151FredericoAffonsoBuenoNo ratings yet
- Quad-Channel, Digital Isolators, Enhanced System-Level Esd Reliability Adum3400/Adum3401/Adum3402Document24 pagesQuad-Channel, Digital Isolators, Enhanced System-Level Esd Reliability Adum3400/Adum3401/Adum3402gem1144aaNo ratings yet
- ADR280 1.2 V Ultralow Power High PSRR Voltage Reference: ÷HZ TypicalDocument8 pagesADR280 1.2 V Ultralow Power High PSRR Voltage Reference: ÷HZ Typicalgem1144aaNo ratings yet
- PIC18C CAN Routines in C' AN738Document32 pagesPIC18C CAN Routines in C' AN738don krtekNo ratings yet
- An 1076 PDFDocument12 pagesAn 1076 PDFjpsidmNo ratings yet
- Tips For c18Document12 pagesTips For c18Bodhibrata MukhopadhyayNo ratings yet
- Hot Swappable Dual I C Isolators Adum1250/Adum1251: Features Functional Block DiagramsDocument12 pagesHot Swappable Dual I C Isolators Adum1250/Adum1251: Features Functional Block Diagramsgem1144aaNo ratings yet
- C Language Reference Manual - 5th EditionDocument208 pagesC Language Reference Manual - 5th Editionioana100% (3)
- ADE7854/ADE7858/ADE7868/ADE7878: Polyphase Multifunction Energy Metering ICDocument4 pagesADE7854/ADE7858/ADE7868/ADE7878: Polyphase Multifunction Energy Metering ICgem1144aaNo ratings yet
- Product Specifications: MethodsDocument16 pagesProduct Specifications: Methodsgem1144aaNo ratings yet
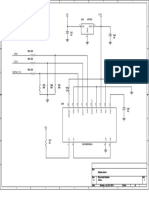
- Display SCHDocument1 pageDisplay SCHgem1144aaNo ratings yet
- Understanding The I C Bus: Application ReportDocument8 pagesUnderstanding The I C Bus: Application ReportWilmer HerreraNo ratings yet
- Ssd1803a 2 0Document69 pagesSsd1803a 2 0gem1144aaNo ratings yet
- MQ135 Semiconductor Sensor For Air Quality ControlDocument3 pagesMQ135 Semiconductor Sensor For Air Quality Controlubuntu 13.04No ratings yet
- OLEDDocument64 pagesOLEDAna WhibleyNo ratings yet
- Op 07Document12 pagesOp 07api-3825669100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MK-PPT Chapter 9Document97 pagesMK-PPT Chapter 9Aruna ShanmugakumarNo ratings yet
- Comp ReqDocument10 pagesComp ReqMohammed MohiuddinNo ratings yet
- RenderDocument34 pagesRenderdiegogachet1618No ratings yet
- PIC16F870Document1 pagePIC16F870Diego VolpiniNo ratings yet
- Gns 3 Tutorial: 1 - Initial Setup (Optional)Document8 pagesGns 3 Tutorial: 1 - Initial Setup (Optional)gojocoi100% (2)
- Mpi MCQDocument83 pagesMpi MCQAKSHAY DagareNo ratings yet
- Citizen CL-S621 631 - LED Error MessagesDocument2 pagesCitizen CL-S621 631 - LED Error MessagesjsixtoNo ratings yet
- What Is Amazon Ec2Document18 pagesWhat Is Amazon Ec2Chaitu ChaitanyaNo ratings yet
- Sap Hana LicenseDocument6 pagesSap Hana LicenseRanga naniNo ratings yet
- 10g ASM IMPLEMENTATION USING LOOPBACK DEVICES - OEL-5.5 PDFDocument37 pages10g ASM IMPLEMENTATION USING LOOPBACK DEVICES - OEL-5.5 PDFG.R.THIYAGU ; Oracle DBA100% (1)
- Binary PDFDocument13 pagesBinary PDFbyprasadNo ratings yet
- EM78P418N Errata Document: Version1.2 To Version1.3Document20 pagesEM78P418N Errata Document: Version1.2 To Version1.3serrano.flia.coNo ratings yet
- How To Use C++ EnvironmentDocument12 pagesHow To Use C++ EnvironmentRoyce GodenNo ratings yet
- NB2500EA MB SchematicDocument45 pagesNB2500EA MB Schematicdatamarce2016 marce100% (1)
- Revisions History: Issued. RevisedDocument28 pagesRevisions History: Issued. Revisedabdel taibNo ratings yet
- Chapter4plc 111011052357 Phpapp02Document39 pagesChapter4plc 111011052357 Phpapp02Nisar AhmedNo ratings yet
- Arc SightDocument25 pagesArc SightGeorgiana MateescuNo ratings yet
- Cisco Expressway Virtual Machine Install Guide X12 5 4Document42 pagesCisco Expressway Virtual Machine Install Guide X12 5 4Valentin GRADINARUNo ratings yet
- Installation of RSCADDocument11 pagesInstallation of RSCADNitin Upadhyay0% (1)
- Expand Your Network by Supernetting IP AddressesDocument4 pagesExpand Your Network by Supernetting IP AddressesAnuj GuptaNo ratings yet
- Learn. Connect. ExploreDocument29 pagesLearn. Connect. Exploretodeneye100% (1)
- Hardware Maintenance Manual: Thinkpad X250Document116 pagesHardware Maintenance Manual: Thinkpad X250Vitor NonatoNo ratings yet
- AnadiusDocument10 pagesAnadiusFã do D4rk 3agleNo ratings yet
- HOWTO Using Openvpn To Bridge NetworksDocument10 pagesHOWTO Using Openvpn To Bridge NetworksNghia NguyenNo ratings yet
- Levels of Computer LanguagesDocument2 pagesLevels of Computer LanguagesDalitsoNo ratings yet
- Openedge DBDocument43 pagesOpenedge DBsudarshanNo ratings yet
- Unikom - Sanny Darmawan Suhendar - Jurnal Dalam Bahasa InggrisDocument8 pagesUnikom - Sanny Darmawan Suhendar - Jurnal Dalam Bahasa InggrisRessaNo ratings yet
- Smartfabric Os10 5 0 - en Us PDFDocument1,314 pagesSmartfabric Os10 5 0 - en Us PDFCristian SobreroNo ratings yet
- LogDocument2 pagesLogHein Aung280KNo ratings yet
- Lux Qig Ams 2600 PDFDocument8 pagesLux Qig Ams 2600 PDFSergio Andres MazoNo ratings yet