You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- F2D TutorialTechnical BrushlessIPM MotorDocument129 pagesF2D TutorialTechnical BrushlessIPM MotorFutureProfaneNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Input Filter Interactions With Switching by BassoDocument166 pagesInput Filter Interactions With Switching by BassoshrikrisNo ratings yet
- 33 KV Control Relay Spec PDFDocument75 pages33 KV Control Relay Spec PDFMohanta Amrit100% (2)
- Design of PID ControllerDocument13 pagesDesign of PID ControllershrikrisNo ratings yet
- MmuDocument113 pagesMmuSunny SanNo ratings yet
- 3 Phase Grid Connected PV Inverter PSIMDocument15 pages3 Phase Grid Connected PV Inverter PSIMshrikrisNo ratings yet
- The Skin Effect - Philips Technical Review Volume28Document16 pagesThe Skin Effect - Philips Technical Review Volume28shrikrisNo ratings yet
- Simplified High-Accuracy Calculation of Eddy-Current Losses in Round-Wire WindingsDocument8 pagesSimplified High-Accuracy Calculation of Eddy-Current Losses in Round-Wire WindingsshrikrisNo ratings yet
- CISPR15 2013 StandardDocument50 pagesCISPR15 2013 StandardshrikrisNo ratings yet
- Stray-Current Losses in Stranded Windings of Transformers Bu KaulDocument10 pagesStray-Current Losses in Stranded Windings of Transformers Bu KaulshrikrisNo ratings yet
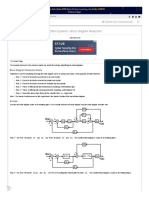
- Control Systems Block Diagram Reduction Www-TutorialspointDocument2 pagesControl Systems Block Diagram Reduction Www-TutorialspointshrikrisNo ratings yet
- Control Systems Control Systems Masons Gain Formula-Www-Tutorialspoint-ComDocument6 pagesControl Systems Control Systems Masons Gain Formula-Www-Tutorialspoint-ComshrikrisNo ratings yet
- Input Filter Design by EricksonDocument49 pagesInput Filter Design by EricksonshrikrisNo ratings yet
- Control Systems Block Diagram Reduction and Mason's Formula Www-TutorialspointDocument8 pagesControl Systems Block Diagram Reduction and Mason's Formula Www-TutorialspointshrikrisNo ratings yet
- A Very Accurate Measurement System For Multielectrode Capacitive Sensors - Excellent - PaperDocument5 pagesA Very Accurate Measurement System For Multielectrode Capacitive Sensors - Excellent - PapershrikrisNo ratings yet
- A Low-Cost Highly Stable Reference Capacitor For Capacitive Sensor SystemsDocument5 pagesA Low-Cost Highly Stable Reference Capacitor For Capacitive Sensor SystemsshrikrisNo ratings yet
- Input Impedance Measurements For Stable Input Filter Design by OMICRONDocument22 pagesInput Impedance Measurements For Stable Input Filter Design by OMICRONshrikrisNo ratings yet
- Input Filter Design Example Biricha Digital Power LTDDocument5 pagesInput Filter Design Example Biricha Digital Power LTDshrikrisNo ratings yet
- EMI Filter Design For An Isolated DC-DC Boost ConverterDocument25 pagesEMI Filter Design For An Isolated DC-DC Boost ConvertershrikrisNo ratings yet
- Input Filter Compensation For Switching Regulators by S S KelkarDocument371 pagesInput Filter Compensation For Switching Regulators by S S KelkarshrikrisNo ratings yet
- 5 KW Two-Channel Interleaved CCM PFC EVAL Board InfineonDocument41 pages5 KW Two-Channel Interleaved CCM PFC EVAL Board InfineonshrikrisNo ratings yet
- EROR AMPLIFIER AND COMPENSATION NETWORK DESIGN Slup069Document4 pagesEROR AMPLIFIER AND COMPENSATION NETWORK DESIGN Slup069shrikris0% (1)
- A Practical Method For Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing by Analog DrevicesDocument4 pagesA Practical Method For Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing by Analog DrevicesshrikrisNo ratings yet
- A Compact, High Voltage 25 KW, 50 KHZ DC-DC Converter Based On SiC JFETs (1226)Document7 pagesA Compact, High Voltage 25 KW, 50 KHZ DC-DC Converter Based On SiC JFETs (1226)shrikrisNo ratings yet
- Ltspice Tutorial: Part 2: Send Mail To: With Questions About This Site SitemapDocument1 pageLtspice Tutorial: Part 2: Send Mail To: With Questions About This Site SitemapshrikrisNo ratings yet
- Frequency Response Measurements For Switching Power Supplies Slup121Document13 pagesFrequency Response Measurements For Switching Power Supplies Slup121shrikrisNo ratings yet
- Internal Compensation - Boon or Bane Slup174Document14 pagesInternal Compensation - Boon or Bane Slup174shrikrisNo ratings yet
- Performance Comparison of Ferrite and Nanocrystalline Cores For Medium-Frequency Transformer of DC-DC ConverterDocument21 pagesPerformance Comparison of Ferrite and Nanocrystalline Cores For Medium-Frequency Transformer of DC-DC ConvertershrikrisNo ratings yet
- Ltspice Tutorial: Part 3: Send Mail To: With Questions About This Site SitemapDocument1 pageLtspice Tutorial: Part 3: Send Mail To: With Questions About This Site SitemapshrikrisNo ratings yet
- GTP For 250kva Star-2Document6 pagesGTP For 250kva Star-2Geetha BNo ratings yet
- 2009 Kamaraju - Electrical Power Distribution Systems-McGraw HillDocument278 pages2009 Kamaraju - Electrical Power Distribution Systems-McGraw HillC071Ridho Setiawan TuitantoNo ratings yet
- Circuit Schematic SymbolsDocument7 pagesCircuit Schematic SymbolsRajesh KannanNo ratings yet
- Arn 200 05 8Document3 pagesArn 200 05 8defsyNo ratings yet
- Report GSM Based Remote Monitoring of 3 Parameters On TransformersDocument16 pagesReport GSM Based Remote Monitoring of 3 Parameters On TransformersJilly ArasuNo ratings yet
- XM Dynamic Measurement Module Terminal Base: Installation InstructionsDocument24 pagesXM Dynamic Measurement Module Terminal Base: Installation InstructionsNelsonNo ratings yet
- Jackson 1 7 Homework SolutionDocument3 pagesJackson 1 7 Homework SolutionAna MariaNo ratings yet
- Relay SettingDocument17 pagesRelay SettingFuat BolatNo ratings yet
- Text Books:: 3 G.T.Heydt, "Electric Power Quality", Stars in A Circle Publications, 1994Document1 pageText Books:: 3 G.T.Heydt, "Electric Power Quality", Stars in A Circle Publications, 1994Jagadish Babu KondraguntaNo ratings yet
- Shure Sm81-Specification-Sheet-English PDFDocument1 pageShure Sm81-Specification-Sheet-English PDFVicent Adsuara MoraNo ratings yet
- Fiche Technique 500489 Thermistance PTC TDK b59990 c120 A70 55 1 PcsDocument15 pagesFiche Technique 500489 Thermistance PTC TDK b59990 c120 A70 55 1 PcsBelghennou Hadj AliNo ratings yet
- EEE332 - Lecture 1Document14 pagesEEE332 - Lecture 1NASIM eeeNo ratings yet
- Physics II Problems PDFDocument1 pagePhysics II Problems PDFBOSS BOSSNo ratings yet
- A 13486Document3 pagesA 13486Mohamed ShameemNo ratings yet
- 502 LM324N PDFDocument13 pages502 LM324N PDFmantenimiento74No ratings yet
- DTQ27S3FC Service ManualDocument45 pagesDTQ27S3FC Service ManualDavid Castillo CerdaNo ratings yet
- Alumoweld ProductsDocument28 pagesAlumoweld Productsjpnovoa2002No ratings yet
- Typenschild Simotics S 1fk7 enDocument1 pageTypenschild Simotics S 1fk7 enSandra CastañoNo ratings yet
- Thermometrics Temperature Sensor Solutions: AmphenolDocument16 pagesThermometrics Temperature Sensor Solutions: AmphenolFernando AbadNo ratings yet
- TM11-2648 Vibrator Pack PP-68 U, 1945Document43 pagesTM11-2648 Vibrator Pack PP-68 U, 1945david_graves_okstateNo ratings yet
- Econoled by Trend LightingDocument1 pageEconoled by Trend LightingFrederickNo ratings yet
- Study Material and Books For GATE ECE PreparationsDocument2 pagesStudy Material and Books For GATE ECE PreparationskulnixNo ratings yet
- An Aperture-Coupled Microstrip Antenna With Reconfigurable Radiation Pattern PDFDocument24 pagesAn Aperture-Coupled Microstrip Antenna With Reconfigurable Radiation Pattern PDFrajendrasoloniNo ratings yet
- Fire Rated CableDocument1 pageFire Rated CableSLC ScaleneNo ratings yet
- IEEE Xplore Full-Text PDFDocument10 pagesIEEE Xplore Full-Text PDFpshyciNo ratings yet
- STE Curriculum GuidesDocument13 pagesSTE Curriculum GuidesJonathanEncomiendaNo ratings yet
- Pilz PSS1 DI 2 Operating ManualDocument33 pagesPilz PSS1 DI 2 Operating ManualHenrique FernandesNo ratings yet