You might also like
- A Unified Small Signal Analysis of DC-DC Converters With Average Current Mode ControlDocument8 pagesA Unified Small Signal Analysis of DC-DC Converters With Average Current Mode ControlM UMAR ABBASINo ratings yet
- An Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsDocument4 pagesAn Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsdevchandarNo ratings yet
- Controller Design For Buck Converter Step-by-Step Approach: Swapna ManurkarDocument3 pagesController Design For Buck Converter Step-by-Step Approach: Swapna ManurkarJessica RossNo ratings yet
- Performance Comparison of Continuous Conduction Mode (CCM)Document5 pagesPerformance Comparison of Continuous Conduction Mode (CCM)harshalvikasNo ratings yet
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavNo ratings yet
- An Open-Loop Stepper Motor Driver Based On FPGADocument5 pagesAn Open-Loop Stepper Motor Driver Based On FPGADivya JamesNo ratings yet
- A Novel Accurate Adaptive Constant On-Time Buck Converter For A Wide-Range OperationDocument11 pagesA Novel Accurate Adaptive Constant On-Time Buck Converter For A Wide-Range OperationzzhbpainNo ratings yet
- Stability Analysis of Sepic Converter Using Matlab-SimulinkDocument6 pagesStability Analysis of Sepic Converter Using Matlab-SimulinkHilmy AwadNo ratings yet
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalNo ratings yet
- Inverter Distributed: Controller Generation SystemsDocument7 pagesInverter Distributed: Controller Generation SystemsJohnNo ratings yet
- An Error-Based Controlled Single-Inductor 10-Output DC-DC Buck Converter With High Efficiency Under Light Load Using Adaptive Pulse ModulationDocument14 pagesAn Error-Based Controlled Single-Inductor 10-Output DC-DC Buck Converter With High Efficiency Under Light Load Using Adaptive Pulse ModulationAhmed KamalNo ratings yet
- Steady-State Analysis of The LLC Series Resonant ConverterDocument8 pagesSteady-State Analysis of The LLC Series Resonant Converter章肇珩No ratings yet
- A Novel Tri-State Boost Converter With Fast DynamicsDocument7 pagesA Novel Tri-State Boost Converter With Fast DynamicsJie99No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Buck or Boost Tracking Power ConverterDocument4 pagesBuck or Boost Tracking Power ConverterBishoo ShenoudaNo ratings yet
- On DC/DC Voltage Buck Converter Control Improvement Through The QFT ApproachDocument8 pagesOn DC/DC Voltage Buck Converter Control Improvement Through The QFT ApproachJessica RossNo ratings yet
- Isolated Bridgeless ConverterDocument9 pagesIsolated Bridgeless ConverterAnkit MishraNo ratings yet
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDocument10 pagesLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasNo ratings yet
- A New, Continuous-Time Model For Current-Mode ControlDocument10 pagesA New, Continuous-Time Model For Current-Mode ControlChuang BiNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- Fuzzy Logic Direct Torque ControlDocument6 pagesFuzzy Logic Direct Torque ControlBook4AllNo ratings yet
- PPTPRITYDocument27 pagesPPTPRITYPrity kumariNo ratings yet
- Isolated Soft-Switching HFAC-Link 3-Phase ACAC ConverterDocument5 pagesIsolated Soft-Switching HFAC-Link 3-Phase ACAC ConverterAndre LimaNo ratings yet
- OLTC ScanDocument3 pagesOLTC Scanwilliam damanikNo ratings yet
- Adaptive Constant On-Time (D-CAP™) Control Study inNotebookApps - Slva281bDocument9 pagesAdaptive Constant On-Time (D-CAP™) Control Study inNotebookApps - Slva281bMalli ArjunNo ratings yet
- Self 4Document8 pagesSelf 4ShenbagalakshmiNo ratings yet
- Power Factor Correction AC-DC ConverterDocument5 pagesPower Factor Correction AC-DC Convertermatadamahesh1No ratings yet
- Controlled Switching of Circuit Breaker and Its Site MeasurementDocument4 pagesControlled Switching of Circuit Breaker and Its Site MeasurementprabhuNo ratings yet
- (8.3) Operation of PWM Voltage Source Inverters in The Overmodulation RegionDocument10 pages(8.3) Operation of PWM Voltage Source Inverters in The Overmodulation Regionenrico piccoNo ratings yet
- Electrical AnalyzerDocument8 pagesElectrical AnalyzerrhusheinNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Sliding Mode Controller For PWM Based Buck-Boost DC/DC Converter As State Space Averaging Method in Continuous Conduction ModeDocument5 pagesSliding Mode Controller For PWM Based Buck-Boost DC/DC Converter As State Space Averaging Method in Continuous Conduction Modet.benaissaNo ratings yet
- Understanding Current Control Snva555Document30 pagesUnderstanding Current Control Snva555boteem20070% (1)
- Dynamic Analysis of Three-Port DC/DC Converter For Space ApplicationsDocument7 pagesDynamic Analysis of Three-Port DC/DC Converter For Space ApplicationsPrathap VuyyuruNo ratings yet
- A Non-Inverting Buck-Boost DC-DC SwitchingDocument15 pagesA Non-Inverting Buck-Boost DC-DC Switchingtejwaniravi2007No ratings yet
- Control BLDC MotorsDocument5 pagesControl BLDC MotorsVasu SureshNo ratings yet
- Maximum Power Point Tracking For Wind Energy Conversion System of Doubly Fed Induction Generator Using Z-Source InverterDocument6 pagesMaximum Power Point Tracking For Wind Energy Conversion System of Doubly Fed Induction Generator Using Z-Source InverterManoj KumarNo ratings yet
- Informe Convetidor Flyback Lazo Cerrado CopyDocument7 pagesInforme Convetidor Flyback Lazo Cerrado CopyJhonny MoyonNo ratings yet
- Design and Implementation of Sliding Mode Voltage Controller For DC To DC Bucl Converter by Using Hysteresis Modulation and Pulse Width ModulationDocument6 pagesDesign and Implementation of Sliding Mode Voltage Controller For DC To DC Bucl Converter by Using Hysteresis Modulation and Pulse Width ModulationVishal PusadkarNo ratings yet
- Topic Assignment14Document6 pagesTopic Assignment14cuongakamarineNo ratings yet
- A Zero-Voltage Switching Full-Bridge DC - DC ConverterDocument8 pagesA Zero-Voltage Switching Full-Bridge DC - DC Convertersuresh100% (1)
- EE2301 Power ElectronicsDocument12 pagesEE2301 Power ElectronicsMuniyasamy BalaNo ratings yet
- One-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorDocument12 pagesOne-Cycle-Controlled Bidirectional AC-to-DC Converter With Constant Power FactorKrishna ReddyNo ratings yet
- 445 AndradaDocument5 pages445 AndradaSung Ryoung LimNo ratings yet
- AN920/D Theory and Applications of The MC34063 and mA78S40 Switching Regulator Control CircuitsDocument42 pagesAN920/D Theory and Applications of The MC34063 and mA78S40 Switching Regulator Control CircuitsKikaNo ratings yet
- An Ultra Sparse Matrix Converter With A Novel Active Clamp CircuitDocument8 pagesAn Ultra Sparse Matrix Converter With A Novel Active Clamp CircuitAmal P NirmalNo ratings yet
- Particle Swarm Optimization For Improved Performance of PID Controller On Buck ConverterDocument5 pagesParticle Swarm Optimization For Improved Performance of PID Controller On Buck ConverterjamesNo ratings yet
- Application Note AN-1043: Stabilize The Buck Converter With Transconductance AmplifierDocument12 pagesApplication Note AN-1043: Stabilize The Buck Converter With Transconductance AmplifierMaurício YoshimotoNo ratings yet
- Phase-Shifted Cascaded Dual-Buck AC-AC Converter With Less Number of InductorsDocument13 pagesPhase-Shifted Cascaded Dual-Buck AC-AC Converter With Less Number of InductorsNguyễn Hữu MinhNo ratings yet
- Control Induction Motor: StrategyDocument8 pagesControl Induction Motor: StrategyMohan MatliNo ratings yet
- Single-Inductor Multi-Output (SIMO) DC-DC Converters With High Light-Load Efficiency and Minimized Cross-Regulation For Portable DevicesDocument13 pagesSingle-Inductor Multi-Output (SIMO) DC-DC Converters With High Light-Load Efficiency and Minimized Cross-Regulation For Portable DevicesNgô Gia HảiNo ratings yet
- Analysis of A Boost PFC Pre-Regulator Operated in Both CRM and DCMDocument6 pagesAnalysis of A Boost PFC Pre-Regulator Operated in Both CRM and DCMViet Anh DoNo ratings yet
- Chapter - 1: Three Phase SCR Module PEC14HV5PDocument27 pagesChapter - 1: Three Phase SCR Module PEC14HV5Pp.saravanakumarNo ratings yet
- Modulation Strategies For Three-Phase AC-DC Matrix Converters A ComparisonDocument7 pagesModulation Strategies For Three-Phase AC-DC Matrix Converters A ComparisonSudip MondalNo ratings yet
- Bootstrapping Your Op Amp Yields Wide Voltage Swings: DesignfeatureDocument8 pagesBootstrapping Your Op Amp Yields Wide Voltage Swings: DesignfeatureNishant_s123No ratings yet
- Full-Order Terminal Sliding Mode Control For Boost ConverterDocument5 pagesFull-Order Terminal Sliding Mode Control For Boost ConverterAbderrahman LahouaouiNo ratings yet
- Two-Loop Voltage-Mode Control of Coupled Inductor Step-Down Buck ConverterDocument9 pagesTwo-Loop Voltage-Mode Control of Coupled Inductor Step-Down Buck ConverterRaveendhra IitrNo ratings yet
- Power-Factor Correction Using Cuk Converters in Discontinuous-Capacitor-Voltage Mode OperationDocument6 pagesPower-Factor Correction Using Cuk Converters in Discontinuous-Capacitor-Voltage Mode Operationyasiree460No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- CISPR15 2013 StandardDocument50 pagesCISPR15 2013 StandardshrikrisNo ratings yet
- 3 Phase Grid Connected PV Inverter PSIMDocument15 pages3 Phase Grid Connected PV Inverter PSIMshrikrisNo ratings yet
- Stray-Current Losses in Stranded Windings of Transformers Bu KaulDocument10 pagesStray-Current Losses in Stranded Windings of Transformers Bu KaulshrikrisNo ratings yet
- Simplified High-Accuracy Calculation of Eddy-Current Losses in Round-Wire WindingsDocument8 pagesSimplified High-Accuracy Calculation of Eddy-Current Losses in Round-Wire WindingsshrikrisNo ratings yet
- Input Impedance Measurements For Stable Input Filter Design by OMICRONDocument22 pagesInput Impedance Measurements For Stable Input Filter Design by OMICRONshrikrisNo ratings yet
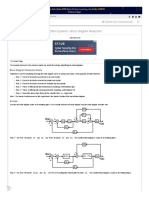
- Control Systems Block Diagram Reduction and Mason's Formula Www-TutorialspointDocument8 pagesControl Systems Block Diagram Reduction and Mason's Formula Www-TutorialspointshrikrisNo ratings yet
- A Very Accurate Measurement System For Multielectrode Capacitive Sensors - Excellent - PaperDocument5 pagesA Very Accurate Measurement System For Multielectrode Capacitive Sensors - Excellent - PapershrikrisNo ratings yet
- Design of PID ControllerDocument13 pagesDesign of PID ControllershrikrisNo ratings yet
- A Low-Cost Highly Stable Reference Capacitor For Capacitive Sensor SystemsDocument5 pagesA Low-Cost Highly Stable Reference Capacitor For Capacitive Sensor SystemsshrikrisNo ratings yet
- The Skin Effect - Philips Technical Review Volume28Document16 pagesThe Skin Effect - Philips Technical Review Volume28shrikrisNo ratings yet
- Control Systems Control Systems Masons Gain Formula-Www-Tutorialspoint-ComDocument6 pagesControl Systems Control Systems Masons Gain Formula-Www-Tutorialspoint-ComshrikrisNo ratings yet
- Control Systems Block Diagram Reduction Www-TutorialspointDocument2 pagesControl Systems Block Diagram Reduction Www-TutorialspointshrikrisNo ratings yet
- Input Filter Interactions With Switching by BassoDocument166 pagesInput Filter Interactions With Switching by BassoshrikrisNo ratings yet
- Input Filter Design Example Biricha Digital Power LTDDocument5 pagesInput Filter Design Example Biricha Digital Power LTDshrikrisNo ratings yet
- 5 KW Two-Channel Interleaved CCM PFC EVAL Board InfineonDocument41 pages5 KW Two-Channel Interleaved CCM PFC EVAL Board InfineonshrikrisNo ratings yet
- Input Filter Compensation For Switching Regulators by S S KelkarDocument371 pagesInput Filter Compensation For Switching Regulators by S S KelkarshrikrisNo ratings yet
- Input Filter Design by EricksonDocument49 pagesInput Filter Design by EricksonshrikrisNo ratings yet
- Performance Comparison of Ferrite and Nanocrystalline Cores For Medium-Frequency Transformer of DC-DC ConverterDocument21 pagesPerformance Comparison of Ferrite and Nanocrystalline Cores For Medium-Frequency Transformer of DC-DC ConvertershrikrisNo ratings yet
- A Practical Method For Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing by Analog DrevicesDocument4 pagesA Practical Method For Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing by Analog DrevicesshrikrisNo ratings yet
- EMI Filter Design For An Isolated DC-DC Boost ConverterDocument25 pagesEMI Filter Design For An Isolated DC-DC Boost ConvertershrikrisNo ratings yet
- Frequency Response Measurements For Switching Power Supplies Slup121Document13 pagesFrequency Response Measurements For Switching Power Supplies Slup121shrikrisNo ratings yet
- EROR AMPLIFIER AND COMPENSATION NETWORK DESIGN Slup069Document4 pagesEROR AMPLIFIER AND COMPENSATION NETWORK DESIGN Slup069shrikris0% (1)
- Ltspice Tutorial: Part 3: Send Mail To: With Questions About This Site SitemapDocument1 pageLtspice Tutorial: Part 3: Send Mail To: With Questions About This Site SitemapshrikrisNo ratings yet
- A Compact, High Voltage 25 KW, 50 KHZ DC-DC Converter Based On SiC JFETs (1226)Document7 pagesA Compact, High Voltage 25 KW, 50 KHZ DC-DC Converter Based On SiC JFETs (1226)shrikrisNo ratings yet
- Ltspice Tutorial: Part 2: Send Mail To: With Questions About This Site SitemapDocument1 pageLtspice Tutorial: Part 2: Send Mail To: With Questions About This Site SitemapshrikrisNo ratings yet
- Getting Started Manuel Cadence 2017-18Document32 pagesGetting Started Manuel Cadence 2017-18陳景裕No ratings yet
- Exp 5Document9 pagesExp 5Muhamad Fahim SadriNo ratings yet
- 607 Lect 12 LDODocument58 pages607 Lect 12 LDOmikeshinoda2011No ratings yet
- LT 1248 FDDocument12 pagesLT 1248 FDAtiqurrehman UmairNo ratings yet
- Lab 4 - Differentiator & IntegratorDocument14 pagesLab 4 - Differentiator & IntegratorVickneswaran KalerwananNo ratings yet
- B.Tech (ECE) 5th SemDocument12 pagesB.Tech (ECE) 5th Semak182007No ratings yet
- Kx165a SMDocument297 pagesKx165a SMElmer VillegasNo ratings yet
- Lab20 Opamps1 PDFDocument3 pagesLab20 Opamps1 PDFgeorgeNo ratings yet
- A Works On The Principle of Photo Conductivity. Photo Conductivity Is An Optical Phenomenon in Which The Materials Conductivity Is Increased When Light Is Absorbed by The MaterialDocument2 pagesA Works On The Principle of Photo Conductivity. Photo Conductivity Is An Optical Phenomenon in Which The Materials Conductivity Is Increased When Light Is Absorbed by The MaterialELMERNo ratings yet
- Kongunadu College of Engineering and Technology, ThourpattiDocument1 pageKongunadu College of Engineering and Technology, ThourpattishankarNo ratings yet
- PWM Top221-227Document21 pagesPWM Top221-227gilsonNo ratings yet
- L 1 (SSG) (Pe) ( (Ee) Nptel)Document201 pagesL 1 (SSG) (Pe) ( (Ee) Nptel)Neeraj SinghalNo ratings yet
- The RF Sub-Micron Mosfet Line N-Channel Enhancement-Mode Lateral MosfetsDocument12 pagesThe RF Sub-Micron Mosfet Line N-Channel Enhancement-Mode Lateral MosfetsArie DinataNo ratings yet
- Guidelines To Bucking Coils V2.4Document48 pagesGuidelines To Bucking Coils V2.4Roma Electronika100% (1)
- Wave Arts Tube Saturator Vintage: User ManualDocument27 pagesWave Arts Tube Saturator Vintage: User ManualGabriel ChiavettoNo ratings yet
- ARSonic CatalogDocument24 pagesARSonic Catalogphuong daoNo ratings yet
- Lab 2 - Integrators DifferentiatorsDocument10 pagesLab 2 - Integrators DifferentiatorsAlamgir KhanNo ratings yet
- LM1201 Video Amplifier System: General DescriptionDocument16 pagesLM1201 Video Amplifier System: General DescriptionVicenteNo ratings yet
- 11AK18 SM 30pDocument30 pages11AK18 SM 30prumburac13No ratings yet
- IEP Report Yd344Document6 pagesIEP Report Yd344Yuvraj DubeyNo ratings yet
- Diodo Om5007st PDFDocument2 pagesDiodo Om5007st PDFjorgejunierNo ratings yet
- Icom Ic-T3hDocument31 pagesIcom Ic-T3hvjt.radioNo ratings yet
- Towards An Integrated Photonics-Based RadarDocument4 pagesTowards An Integrated Photonics-Based RadarSuzanne MeloNo ratings yet
- GAS - AMPZILLA OriginalDocument8 pagesGAS - AMPZILLA OriginalDOMINO66No ratings yet
- Coils and Electronics: Catalog HY15-3502/USDocument27 pagesCoils and Electronics: Catalog HY15-3502/USPartsGopher.comNo ratings yet
- Engineering Catalogue: Innovation in Engineering EducationDocument96 pagesEngineering Catalogue: Innovation in Engineering EducationJayadev S RNo ratings yet
- prx718xlf Datasheets072913 EmailDocument2 pagesprx718xlf Datasheets072913 Emailapi-246012493100% (1)
- Simplex 4100ES Service Parts List PDFDocument22 pagesSimplex 4100ES Service Parts List PDFAnoir AkkariNo ratings yet
- The Tone Freak Bedroom Guitar Player The Utimate Tone Guide by Marcus Conter (Conter, Marcus)Document89 pagesThe Tone Freak Bedroom Guitar Player The Utimate Tone Guide by Marcus Conter (Conter, Marcus)Raj Syn100% (1)
- ECE Project Report On Laser Based Communication Link - Free PDF DownloadDocument95 pagesECE Project Report On Laser Based Communication Link - Free PDF DownloadVinnie SinghNo ratings yet