You might also like
- 6 Article 160 1 10 20170224Document4 pages6 Article 160 1 10 20170224Sebastian Vallejo RangelNo ratings yet
- Hybrid Evolutionary Methods for Quay Crane SchedulingDocument11 pagesHybrid Evolutionary Methods for Quay Crane SchedulingImane TorbiNo ratings yet
- Project Planning and OutlineDocument11 pagesProject Planning and Outlinessyxz10No ratings yet
- IJE - Volume 32 - Issue 10 - Pages 1464-1479Document16 pagesIJE - Volume 32 - Issue 10 - Pages 1464-1479IMANE TORBINo ratings yet
- A Hybrid Approach For Cross-Docking Scheduling: 1. IntroductionDocument10 pagesA Hybrid Approach For Cross-Docking Scheduling: 1. IntroductionSHUBHAM JAINNo ratings yet
- A Self-Adaptation Algorithm For Quay Crane Scheduling at A Container TerminalDocument11 pagesA Self-Adaptation Algorithm For Quay Crane Scheduling at A Container TerminalIAES IJAINo ratings yet
- Review On Efficient Multi-Objective Optimization For The Vehicle Routing Problem With TimeDocument7 pagesReview On Efficient Multi-Objective Optimization For The Vehicle Routing Problem With TimeIJRASETPublicationsNo ratings yet
- MainDocument26 pagesMaingabrielNo ratings yet
- 23080-Article Text-35909-1-10-20210530Document8 pages23080-Article Text-35909-1-10-20210530ducduy55No ratings yet
- Computers & Industrial Engineering: Rosmalina Hanafi, Erhan KozanDocument9 pagesComputers & Industrial Engineering: Rosmalina Hanafi, Erhan Kozananandsingh868No ratings yet
- Expert Systems With Applications: Narges Kaveshgar, Nathan Huynh, Saeed Khaleghi RahimianDocument10 pagesExpert Systems With Applications: Narges Kaveshgar, Nathan Huynh, Saeed Khaleghi RahimianImane TorbiNo ratings yet
- An Improved Artificial Bee Colony With Perturbation Operators in Scout Bees' Phase For Solving Vehicle Routing Problem With Time WindowsDocument11 pagesAn Improved Artificial Bee Colony With Perturbation Operators in Scout Bees' Phase For Solving Vehicle Routing Problem With Time WindowsIAES IJAINo ratings yet
- An Improved Discrete Migrating Birds Optimization Algorithm For The No-Wait Flow Shop Scheduling ProblemDocument13 pagesAn Improved Discrete Migrating Birds Optimization Algorithm For The No-Wait Flow Shop Scheduling Problemzrdasma01No ratings yet
- 14th ICCCNT 2023 Paper 995Document5 pages14th ICCCNT 2023 Paper 995miniature testNo ratings yet
- 1 s2.0 S0360835218304777 MainDocument12 pages1 s2.0 S0360835218304777 Mainroi.ho2706No ratings yet
- Noura 123Document31 pagesNoura 123Imane TorbiNo ratings yet
- European Journal of Operational Research: Jiang Hang Chen, Der-Horng Lee, Mark GohDocument11 pagesEuropean Journal of Operational Research: Jiang Hang Chen, Der-Horng Lee, Mark GohImane TorbiNo ratings yet
- Mathematics 12 00753 v2Document15 pagesMathematics 12 00753 v2Thang VietNo ratings yet
- Yard Space Allocation Algorithm For Unloading ContDocument22 pagesYard Space Allocation Algorithm For Unloading ContDjilani Hassan GadittoNo ratings yet
- Unstructured Grid Finite-Element Methods for Fluid Flow SimulationDocument70 pagesUnstructured Grid Finite-Element Methods for Fluid Flow SimulationLuis BarboNo ratings yet
- Dynamics and Design Genetic by Algorithm Optimization Coupling Computational Fluid Dynamics and Genetic AlgorithmDocument14 pagesDynamics and Design Genetic by Algorithm Optimization Coupling Computational Fluid Dynamics and Genetic AlgorithmBrian Quintero ArboledaNo ratings yet
- Ready-Mixed ConcreteDocument13 pagesReady-Mixed ConcreteJuanCarlosCarrilloNo ratings yet
- ILS Metaheuristic To Solve The Periodic Vehicle Routing ProblemDocument10 pagesILS Metaheuristic To Solve The Periodic Vehicle Routing ProblemSebastian GarciaNo ratings yet
- An Assembly Line Balancing Problem Autom20160420-4084-164o0p5 PDFDocument8 pagesAn Assembly Line Balancing Problem Autom20160420-4084-164o0p5 PDFAuraNo ratings yet
- A Genetic Algorithm For Robust Berth Allocation and Quay Crane AssignmentDocument16 pagesA Genetic Algorithm For Robust Berth Allocation and Quay Crane AssignmentIMANE TORBINo ratings yet
- Automation in Construction: Zhenyuan Liu, Liu Yang, Raoyi Deng, Jing TianDocument9 pagesAutomation in Construction: Zhenyuan Liu, Liu Yang, Raoyi Deng, Jing TianCESARPINEDANo ratings yet
- A Novel Multi-Objective Particle Swarm Optimization Algorithm For No-Wait Flow Shop Scheduling ProblemsDocument21 pagesA Novel Multi-Objective Particle Swarm Optimization Algorithm For No-Wait Flow Shop Scheduling ProblemsSakthiPriyaNo ratings yet
- Evolution of VRPDocument8 pagesEvolution of VRPOana DraguNo ratings yet
- A Collaborative Iterated Greedy Algorithm With Reinforcement Learning for Energy-Aware Distributed Blocking Flow-shop SchedulingDocument23 pagesA Collaborative Iterated Greedy Algorithm With Reinforcement Learning for Energy-Aware Distributed Blocking Flow-shop SchedulingAyoub OuhadiNo ratings yet
- Capacitor Placement of Distribution Systems Using Particle Swarm Optimization ApproachesDocument13 pagesCapacitor Placement of Distribution Systems Using Particle Swarm Optimization ApproachesRezy Achazia Defianty BrcNo ratings yet
- Li 2013 - SPSA - Well Placement and Control (Robust)Document22 pagesLi 2013 - SPSA - Well Placement and Control (Robust)jamal manssourNo ratings yet
- An Improved Substation Locating and Sizing MethodDocument10 pagesAn Improved Substation Locating and Sizing MethodLorenzo AlbertiniNo ratings yet
- Vida 2019Document27 pagesVida 2019Alberto Vázquez ContrerasNo ratings yet
- A Parallel Dynamic Programming Algorithm For Multi-Reservoir SystemDocument15 pagesA Parallel Dynamic Programming Algorithm For Multi-Reservoir SystemMariana MarselinaNo ratings yet
- An Expanded Robust Optimisation Approach For The Berth Allocation Problem Considering Uncertain Operation TimeDocument16 pagesAn Expanded Robust Optimisation Approach For The Berth Allocation Problem Considering Uncertain Operation Timefengshuai duNo ratings yet
- Geremia 2012Document9 pagesGeremia 2012Ananth Surya TejaNo ratings yet
- Multi-Agent Pathfinding With Continuous TimeDocument80 pagesMulti-Agent Pathfinding With Continuous TimeDavids MarinNo ratings yet
- Genetic Algorithm For Vehicle Routing Problem With BackhaulsDocument8 pagesGenetic Algorithm For Vehicle Routing Problem With BackhaulsYuri Adixs Ucux'saeNo ratings yet
- Zhang Gu 2023 A Discrete Whale Optimization Algorithm For The No Wait Flow Shop Scheduling ProblemDocument16 pagesZhang Gu 2023 A Discrete Whale Optimization Algorithm For The No Wait Flow Shop Scheduling Problemzrdasma01No ratings yet
- Bho Sale 2018Document8 pagesBho Sale 2018Rian PrasetyoNo ratings yet
- A Self-Adaptive Deep Leearning Algorithm For Accelerating Multicomponent Flash CalculationDocument19 pagesA Self-Adaptive Deep Leearning Algorithm For Accelerating Multicomponent Flash CalculationCarolina PiedrahitaNo ratings yet
- Stope Boundary Optimization Using A 3D Approximate Hybrid AlgorithmDocument14 pagesStope Boundary Optimization Using A 3D Approximate Hybrid AlgorithmKENNY BRANDON MAWODZWANo ratings yet
- A Novel Probabilistic Approximate Subgradient Method in Lagrangian Relaxation For Ow-Shop Scheduling ProblemsDocument8 pagesA Novel Probabilistic Approximate Subgradient Method in Lagrangian Relaxation For Ow-Shop Scheduling ProblemsNishit Sushil SinghNo ratings yet
- An Optimized Solution To Multi-Constraint Vehicle Routing ProblemDocument17 pagesAn Optimized Solution To Multi-Constraint Vehicle Routing ProblemINNOVATIVE COMPUTING REVIEWNo ratings yet
- Research Article: Simulation-Based Planning and Control of Transport Flows in Port Logistic SystemsDocument13 pagesResearch Article: Simulation-Based Planning and Control of Transport Flows in Port Logistic SystemsBee ThymeNo ratings yet
- 1 s2.0 S1568494618305775 MainDocument16 pages1 s2.0 S1568494618305775 Mainsamundra24No ratings yet
- Design Optimization of The Lines of The Bulbous BowDocument12 pagesDesign Optimization of The Lines of The Bulbous BowFernando Raúl LADINONo ratings yet
- An Improved Bat Algorithm For The Hybrid Flowshop Scheduling To Minimize Total Job Completion TimeDocument7 pagesAn Improved Bat Algorithm For The Hybrid Flowshop Scheduling To Minimize Total Job Completion TimeRahul SharmaNo ratings yet
- 1 A Simulation Based Model For The BerthDocument9 pages1 A Simulation Based Model For The Berthmonu_vitsNo ratings yet
- 1 A Simulation Based Model For The BerthDocument9 pages1 A Simulation Based Model For The BerthMonu KumarNo ratings yet
- Problem StatementDocument3 pagesProblem Statement2022ht80586No ratings yet
- 1-S2.0-S1568494610000773-Main RUTEO PDFDocument12 pages1-S2.0-S1568494610000773-Main RUTEO PDFCESARPINEDANo ratings yet
- Wren1972 Computer Scheduling of Vehicles From One or More Depots To A Number of Delivery PointsDocument12 pagesWren1972 Computer Scheduling of Vehicles From One or More Depots To A Number of Delivery Pointsmarcelo villegasNo ratings yet
- A Maritime Inventory Routing Problem With Stochastic Sailing and Port Times2015computers and Operations ResearchDocument13 pagesA Maritime Inventory Routing Problem With Stochastic Sailing and Port Times2015computers and Operations Researchmajid yazdaniNo ratings yet
- 4 448608543793217861 PDFDocument10 pages4 448608543793217861 PDFMaryam ShirbanNo ratings yet
- 2013 Ijpe ReprintDocument12 pages2013 Ijpe ReprintDĩnh TràNo ratings yet
- Hybrid Metaheuristics for Clustered Vehicle RoutingDocument13 pagesHybrid Metaheuristics for Clustered Vehicle RoutingCandyE.SansoresNo ratings yet
- P Cell EvolutionaryDocument29 pagesP Cell EvolutionarycsmateNo ratings yet
- JIFS202129Document14 pagesJIFS202129SotirisNo ratings yet
- An Algorithm Based On Makespan Lower Bound For Quay Crane Schedule Problem in Container TerminalsDocument10 pagesAn Algorithm Based On Makespan Lower Bound For Quay Crane Schedule Problem in Container TerminalsImane TorbiNo ratings yet
- Ieem 2018 8607546Document5 pagesIeem 2018 8607546Imane TorbiNo ratings yet
- Scheduling at Container Terminal: Model and Heuristic Algorithm For Quay CraneDocument8 pagesScheduling at Container Terminal: Model and Heuristic Algorithm For Quay CraneImane TorbiNo ratings yet
- Study of The Impact of Quay Crane Productivity Rate On Berth and Quay Crane Assignment and SchedulingDocument6 pagesStudy of The Impact of Quay Crane Productivity Rate On Berth and Quay Crane Assignment and SchedulingImane TorbiNo ratings yet
- Noura 123Document31 pagesNoura 123Imane TorbiNo ratings yet
- A Hybrid Estimation of Distribution Algorithm For The Quay Crane Scheduling ProblemDocument26 pagesA Hybrid Estimation of Distribution Algorithm For The Quay Crane Scheduling ProblemImane TorbiNo ratings yet
- Diabat and Theodorou 2014Document26 pagesDiabat and Theodorou 2014Imane TorbiNo ratings yet
- Chung and Chan 2013Document16 pagesChung and Chan 2013Imane TorbiNo ratings yet
- A Hybrid Estimation of Distribution Algorithm For The Quay Crane Scheduling ProblemDocument26 pagesA Hybrid Estimation of Distribution Algorithm For The Quay Crane Scheduling ProblemImane TorbiNo ratings yet
- European Journal of Operational Research: Jiang Hang Chen, Der-Horng Lee, Mark GohDocument11 pagesEuropean Journal of Operational Research: Jiang Hang Chen, Der-Horng Lee, Mark GohImane TorbiNo ratings yet
- Expert Systems With Applications: Narges Kaveshgar, Nathan Huynh, Saeed Khaleghi RahimianDocument10 pagesExpert Systems With Applications: Narges Kaveshgar, Nathan Huynh, Saeed Khaleghi RahimianImane TorbiNo ratings yet
- Gantry Crane Scheduling With Interference Constraints in Railway Container TerminalsDocument17 pagesGantry Crane Scheduling With Interference Constraints in Railway Container TerminalsImane TorbiNo ratings yet
- Bierwirth and Meisel 2010 (Survey)Document13 pagesBierwirth and Meisel 2010 (Survey)Imane TorbiNo ratings yet
- Kim and Park 2004Document17 pagesKim and Park 2004Imane TorbiNo ratings yet
- Moccia Et Al. 2005Document15 pagesMoccia Et Al. 2005Imane TorbiNo ratings yet
- Sciencedirect: © 2019, Ifac (International Federation of Automatic Control) Hosting by Elsevier Ltd. All Rights ReservedDocument6 pagesSciencedirect: © 2019, Ifac (International Federation of Automatic Control) Hosting by Elsevier Ltd. All Rights ReservedImane TorbiNo ratings yet
- Scheduling at Container Terminal: Model and Heuristic Algorithm For Quay CraneDocument8 pagesScheduling at Container Terminal: Model and Heuristic Algorithm For Quay CraneImane TorbiNo ratings yet
- Exact Method For Single Vessel and Multiple Quay Cranes To Solve Scheduling Problem at Port of Tripoli-LebanonDocument5 pagesExact Method For Single Vessel and Multiple Quay Cranes To Solve Scheduling Problem at Port of Tripoli-LebanonImane TorbiNo ratings yet
- A Hybrid Estimation of Distribution Algorithm For The Quay Crane Scheduling ProblemDocument26 pagesA Hybrid Estimation of Distribution Algorithm For The Quay Crane Scheduling ProblemImane TorbiNo ratings yet
- Study of The Impact of Quay Crane Productivity Rate On Berth and Quay Crane Assignment and SchedulingDocument6 pagesStudy of The Impact of Quay Crane Productivity Rate On Berth and Quay Crane Assignment and SchedulingImane TorbiNo ratings yet
- Coupling The ILS Optimisation Algorithm and A Simulation Process To Solve The Travelling Quay-Crane Worker Assignment and Balancing ProblemDocument18 pagesCoupling The ILS Optimisation Algorithm and A Simulation Process To Solve The Travelling Quay-Crane Worker Assignment and Balancing ProblemImane TorbiNo ratings yet
- Expert Systems With Applications: S.H. Chung, K.L. ChoyDocument9 pagesExpert Systems With Applications: S.H. Chung, K.L. ChoyImane TorbiNo ratings yet
- ThinkVision T24i 20 61F7MAR1LADocument2 pagesThinkVision T24i 20 61F7MAR1LACarlos MonterreyNo ratings yet
- Hemocue WBC Diff: Operating ManualDocument84 pagesHemocue WBC Diff: Operating ManualLowayNo ratings yet
- Efektivitas Pelayanan Surat Izin Usaha PerdaganganDocument121 pagesEfektivitas Pelayanan Surat Izin Usaha PerdaganganSeluruh Dokumentasi1No ratings yet
- Quiz 2Document1 pageQuiz 2zainabathar atharaltafNo ratings yet
- Computer Networks: by Damera Venkatesh Assistant ProfessorDocument22 pagesComputer Networks: by Damera Venkatesh Assistant ProfessorTAMMISETTY VIJAY KUMARNo ratings yet
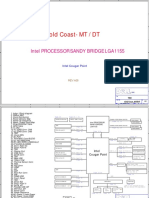
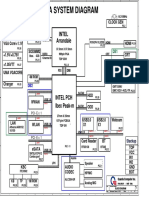
- Dell Optiplex 790 - Gold Coast - MTDT A00 PDFDocument68 pagesDell Optiplex 790 - Gold Coast - MTDT A00 PDFHung KhoiNo ratings yet
- QXDM User Guide PDF: Read/DownloadDocument2 pagesQXDM User Guide PDF: Read/Downloadfani zuhri0% (4)
- Waters 2487 Dual Wavelength Detector Control: Galaxie Driver ManualDocument20 pagesWaters 2487 Dual Wavelength Detector Control: Galaxie Driver ManualNAdreaNo ratings yet
- At 45 DB 081 DDocument53 pagesAt 45 DB 081 DjayakrishnachNo ratings yet
- B.Tech Data Science Course StructureDocument43 pagesB.Tech Data Science Course StructureDr. Shahanawaj AhamadNo ratings yet
- List of Internet Service Providers in BangladeshDocument37 pagesList of Internet Service Providers in BangladeshMd.Tarequl Islam67% (3)
- Chapter 4 - Arrays Pointers and StringDocument28 pagesChapter 4 - Arrays Pointers and StringGébrè SîllãsíêNo ratings yet
- Device Load Monitor With Programmable Meter For Energy AuditDocument5 pagesDevice Load Monitor With Programmable Meter For Energy AuditMandeep G KashyapNo ratings yet
- Module 06 - Remote Access in Windows Server 2016Document19 pagesModule 06 - Remote Access in Windows Server 2016Cong TuanNo ratings yet
- Novel Feature Engineering Methodology for Credit Card Fraud DetectionDocument15 pagesNovel Feature Engineering Methodology for Credit Card Fraud DetectionVictor KingbuilderNo ratings yet
- How To Invest in Software As A Service (SaaS)Document16 pagesHow To Invest in Software As A Service (SaaS)Ferdous Quawser PathanNo ratings yet
- Simocrane Cms System Manual En-UsDocument438 pagesSimocrane Cms System Manual En-Usmarcos sosaNo ratings yet
- Robot Navigation Through QR and Text DetectionDocument9 pagesRobot Navigation Through QR and Text DetectionNguyễn Kha LyNo ratings yet
- Sparklin 2023Document24 pagesSparklin 2023himanshu sharmaNo ratings yet
- Com Asprise Util PDFDocument2 pagesCom Asprise Util PDFTimNo ratings yet
- Data transfer techniques and interrupt systems in microprocessorsDocument16 pagesData transfer techniques and interrupt systems in microprocessorsMubashra KhanNo ratings yet
- Animacion 3DDocument40 pagesAnimacion 3DBRAYAN ROMAN OLIVARES OLIVARESNo ratings yet
- UM8 UMA system diagram overviewDocument46 pagesUM8 UMA system diagram overviewReballing BogotaNo ratings yet
- Wireless Turbidity Sensor Node Using PIC16F877A and X-Bee: P.M.Gavhane, P.P. Tadwalkar, V. D. Bachuwar, D.S.SutraveDocument3 pagesWireless Turbidity Sensor Node Using PIC16F877A and X-Bee: P.M.Gavhane, P.P. Tadwalkar, V. D. Bachuwar, D.S.SutraveSou TVNo ratings yet
- Design and Fabrication of Smart Home With IoT AutomationDocument17 pagesDesign and Fabrication of Smart Home With IoT AutomationRuvimbo Delia HAKATANo ratings yet
- Lab 4Document4 pagesLab 4Syed Abdullah ZaidiNo ratings yet
- Interpretation of Eviews RegressionDocument6 pagesInterpretation of Eviews RegressionRabia Nawaz100% (1)
- Centroid ACDC Servo DriveDocument19 pagesCentroid ACDC Servo DrivePavel PouchlyNo ratings yet
- Understanding Public Display of Affection (PDADocument226 pagesUnderstanding Public Display of Affection (PDAPJNIT SOFTNo ratings yet
- Octal and Hexadecimal Number Systems: © 2014 Project Lead The Way, Inc. Digital ElectronicsDocument25 pagesOctal and Hexadecimal Number Systems: © 2014 Project Lead The Way, Inc. Digital ElectronicsAJNo ratings yet