You might also like
- Lifting Lug CalculationDocument3 pagesLifting Lug Calculationdhirendarji83% (6)
- Plastic Analysis NotesDocument26 pagesPlastic Analysis NotesTatiana Espinoza Eusebio100% (1)
- Mechanics of Materials: TorsionDocument25 pagesMechanics of Materials: TorsionenochnancyNo ratings yet
- Negative Skin Friction DowndragDocument42 pagesNegative Skin Friction DowndragAdita Rizki GumilangNo ratings yet
- FE Simulation of Ultrasonic Vibrations in TurningDocument11 pagesFE Simulation of Ultrasonic Vibrations in TurningklausoshoNo ratings yet
- Project ProposalDocument28 pagesProject ProposalankushNo ratings yet
- Principal Stresses and StrainsDocument44 pagesPrincipal Stresses and Strainskavi krishna100% (1)
- Choo Etal ARMA 2021Document8 pagesChoo Etal ARMA 2021Truc PhanNo ratings yet
- 2017 ENAHPE - AlanDocument7 pages2017 ENAHPE - AlanAlan LugariniNo ratings yet
- Mechanical Properties of PolymerDocument13 pagesMechanical Properties of PolymerAdarsh PNo ratings yet
- Bending and Creep Buckling Response of Viscoelastic Functionally Graded Beam-Columns PDFDocument9 pagesBending and Creep Buckling Response of Viscoelastic Functionally Graded Beam-Columns PDFMehmedNo ratings yet
- Three-Dimensional Cavern Analysis For A Hydroelectric Project in India, Using FLAC3DDocument9 pagesThree-Dimensional Cavern Analysis For A Hydroelectric Project in India, Using FLAC3Dbhandaritushar1390No ratings yet
- Ion Beams' Hydrodynamic Approach To The Generation of Surface PatternsDocument10 pagesIon Beams' Hydrodynamic Approach To The Generation of Surface PatternsIAEME PublicationNo ratings yet
- Three-Dimensional Viscoelastic Simulation of Woven CompositeDocument13 pagesThree-Dimensional Viscoelastic Simulation of Woven CompositeGeorgiana DumitruNo ratings yet
- Fluid Phase Equilibria: Sashanka Sekhar Mandal, Sudhir Kumar Singh, Sanchari Bhattacharjee, Sandip KhanDocument10 pagesFluid Phase Equilibria: Sashanka Sekhar Mandal, Sudhir Kumar Singh, Sanchari Bhattacharjee, Sandip Khanvbjunmk1234567No ratings yet
- Materials Science & Engineering A: Y.Y. Wang, X. Sun, Y.D. Wang, X.H. Hu, H.M. ZbibDocument13 pagesMaterials Science & Engineering A: Y.Y. Wang, X. Sun, Y.D. Wang, X.H. Hu, H.M. Zbib23_riya_mondalNo ratings yet
- A Fluid-Mechanical Model of Elastocapillary Coalescence: Bykiransingh, Johnr. Lister DominicvellaDocument25 pagesA Fluid-Mechanical Model of Elastocapillary Coalescence: Bykiransingh, Johnr. Lister DominicvellasreenathNo ratings yet
- Borisova 2005Document19 pagesBorisova 2005Bùi Thanh TùngNo ratings yet
- Numerical Modeling For Undrained Shear Strength of Clays Subjected To Different Plasticity IndexesDocument11 pagesNumerical Modeling For Undrained Shear Strength of Clays Subjected To Different Plasticity IndexesmybestloveNo ratings yet
- Formation of Silicone Elastomer Networks Films With Gradients in ModulusDocument12 pagesFormation of Silicone Elastomer Networks Films With Gradients in Modulustoyito20No ratings yet
- Modelo Reológico de Fractura en Un SolidoDocument12 pagesModelo Reológico de Fractura en Un SolidoJose Antonio Sonco MarronNo ratings yet
- A Hypoplastic Macroelement For Single Vertical Piles in Sand Subject To Three-Dimensional Loading ConditionsDocument19 pagesA Hypoplastic Macroelement For Single Vertical Piles in Sand Subject To Three-Dimensional Loading ConditionsStructural SpreadsheetsNo ratings yet
- Computers and Geotechnics: Yufei Kong, Ming Xu, Erxiang SongDocument12 pagesComputers and Geotechnics: Yufei Kong, Ming Xu, Erxiang SongHendra SaputraNo ratings yet
- Omid 1Document12 pagesOmid 1ali2pakniyatNo ratings yet
- E3sconf Eunsat2016 03001Document7 pagesE3sconf Eunsat2016 03001a4abhirawatNo ratings yet
- 2012 DrBabakEbrahimian MRCDocument8 pages2012 DrBabakEbrahimian MRCvcox4460No ratings yet
- Liquefaction Analysis at Multi-Layered Ground ConsDocument12 pagesLiquefaction Analysis at Multi-Layered Ground ConsHüseyin EkiciNo ratings yet
- Minerals 13 00498Document17 pagesMinerals 13 00498Vidhya LakshmiNo ratings yet
- Rheological Behavior of Magnetorheological Suspensions Under Shear, Creep and Large Amplitude Oscillatory Shear (LAOS) OwDocument5 pagesRheological Behavior of Magnetorheological Suspensions Under Shear, Creep and Large Amplitude Oscillatory Shear (LAOS) OwSandesh BhakthaNo ratings yet
- Micromechanical Analysis of Damage in Satur - 2012 - International Journal of SoDocument10 pagesMicromechanical Analysis of Damage in Satur - 2012 - International Journal of SoPaulNo ratings yet
- BMG Gao2006Document18 pagesBMG Gao2006Amina DinariNo ratings yet
- Ortiz (1985) - A Constitutive Theory For The Inelastic Behavior of ConcreteDocument27 pagesOrtiz (1985) - A Constitutive Theory For The Inelastic Behavior of ConcreteSalvatore MirandaNo ratings yet
- Elastoplastic CreepDocument9 pagesElastoplastic CreepputriNo ratings yet
- 1 s2.0 S0749641914001995 MainDocument23 pages1 s2.0 S0749641914001995 Mainmen brightNo ratings yet
- Numerical Simulation of Fluid Flow Through Fractal-Based Discrete Fractured NetworkDocument15 pagesNumerical Simulation of Fluid Flow Through Fractal-Based Discrete Fractured Networksameer bakshiNo ratings yet
- CFD and Bubble PopulationDocument16 pagesCFD and Bubble PopulationJoeyNo ratings yet
- Elastoplastic Model Cemented Soils PDFDocument9 pagesElastoplastic Model Cemented Soils PDFrkNo ratings yet
- Cavitation in Unfilled and Nano-CACO3 Filled HDPE Subjected To Tensile Test. Revelation, Localization, and QuantificationDocument12 pagesCavitation in Unfilled and Nano-CACO3 Filled HDPE Subjected To Tensile Test. Revelation, Localization, and QuantificationUriel PeñaNo ratings yet
- J2 BahanDocument21 pagesJ2 Bahanmr mustofaNo ratings yet
- Engineering Analysis With Boundary Elements: Zhi Yong Ai, Zi YeDocument14 pagesEngineering Analysis With Boundary Elements: Zhi Yong Ai, Zi YeDr. Sushant ShekharNo ratings yet
- A Multiscale Poroelastic Damage Model For Fracturing in Permeable Rocks1Document21 pagesA Multiscale Poroelastic Damage Model For Fracturing in Permeable Rocks1Axel DorianNo ratings yet
- A Homogenization Scheme For The Plastic Properties of Nanocrystalline MaterialsDocument22 pagesA Homogenization Scheme For The Plastic Properties of Nanocrystalline Materialssaded05No ratings yet
- M Ferdaos Mostapa - 2017 - The Versatility of Integrating 3D Seismic Transformations and Well Log Data For Carbonate Complex Reservoir Modelling1Document7 pagesM Ferdaos Mostapa - 2017 - The Versatility of Integrating 3D Seismic Transformations and Well Log Data For Carbonate Complex Reservoir Modelling1Muhammad Ferdaos Bin MostapaNo ratings yet
- Snap Back For ConcreteDocument15 pagesSnap Back For ConcreteKILARUDIVYANo ratings yet
- ClayffDocument12 pagesClayffLady PaterNo ratings yet
- Finite Element Simulation of The Viscoelastic Behavior of Elastomers Under Finite Deformation With Consideration of Nonlinear Material ViscosityDocument22 pagesFinite Element Simulation of The Viscoelastic Behavior of Elastomers Under Finite Deformation With Consideration of Nonlinear Material ViscosityNam Huu TranNo ratings yet
- Wadsworth-2017-Topological Inversions in CoaleDocument6 pagesWadsworth-2017-Topological Inversions in Coale旭康 鲁No ratings yet
- 1 s2.0 S1876380420601227 MainDocument14 pages1 s2.0 S1876380420601227 Maindorian.axel.ptNo ratings yet
- Statics and Dynamics of Adhesion Between Two SoapDocument11 pagesStatics and Dynamics of Adhesion Between Two SoapShreyank Deepali GoelNo ratings yet
- 2022 KwaketalDocument14 pages2022 KwaketalJohn Glenn PerongNo ratings yet
- Kim Jacobs 21Document20 pagesKim Jacobs 21benoit AppolaireNo ratings yet
- Biaxial Experimental Characterizations of Soft Polymers A ReviewDocument28 pagesBiaxial Experimental Characterizations of Soft Polymers A ReviewbazookavnitNo ratings yet
- ChenJWWangZFAMK23-arXiv 2301.13713DiscretfxinCPFEMDocument29 pagesChenJWWangZFAMK23-arXiv 2301.13713DiscretfxinCPFEMNoverdo SaputraNo ratings yet
- An Integrated Approach To Assess The Petrophysical Properties of Rocks Altered by Rock/Fluid Interactions (Co2 Injection)Document14 pagesAn Integrated Approach To Assess The Petrophysical Properties of Rocks Altered by Rock/Fluid Interactions (Co2 Injection)Rosa K Chang HNo ratings yet
- Journal of Structural Geology: Teng-Fong Wong, Patrick BaudDocument29 pagesJournal of Structural Geology: Teng-Fong Wong, Patrick BaudJuan Andres Bascur TorrejónNo ratings yet
- Zehsaz 2014Document11 pagesZehsaz 2014Vicky PolychronidouNo ratings yet
- Creep 2013Document23 pagesCreep 2013Bassam AbdelazeemNo ratings yet
- s0927 77572900438 0 PDFDocument15 pagess0927 77572900438 0 PDFRyan RamalhoNo ratings yet
- 1 s2.0 S0266352X16302324 MainDocument14 pages1 s2.0 S0266352X16302324 MainLuana PereiraNo ratings yet
- 2017 MI ClusteringDocument17 pages2017 MI ClusteringmakkusaNo ratings yet
- Deep Underground Science and Engineering - 2023 - Haque - Nonlinear Anisotropic Finite Element Analysis of LiquefiableDocument11 pagesDeep Underground Science and Engineering - 2023 - Haque - Nonlinear Anisotropic Finite Element Analysis of Liquefiableyanli.gao.0No ratings yet
- Acta Materialia: T.C. Su, C. O'Sullivan, T. Nagira, H. Yasuda, C.M. GourlayDocument18 pagesActa Materialia: T.C. Su, C. O'Sullivan, T. Nagira, H. Yasuda, C.M. GourlayAT8iNo ratings yet
- Fang Et Al-2018-Arabian Journal of GeosciencesDocument18 pagesFang Et Al-2018-Arabian Journal of Geosciences3 éme infraNo ratings yet
- Arma 2021 1129Document8 pagesArma 2021 1129EKREM ALAGÖZNo ratings yet
- Sahu 2022 J. Electrochem. Soc. 169 020557Document11 pagesSahu 2022 J. Electrochem. Soc. 169 020557戴海龙No ratings yet
- Metals: A Novel Damage Model To Predict Ductile Fracture Behavior For Anisotropic Sheet MetalDocument19 pagesMetals: A Novel Damage Model To Predict Ductile Fracture Behavior For Anisotropic Sheet MetalKrunal MoreyNo ratings yet
- Anisotropic Plasticity For Sheet Metals Using The Concept of Combined Isotropic-Kinematic HardeningDocument22 pagesAnisotropic Plasticity For Sheet Metals Using The Concept of Combined Isotropic-Kinematic HardeningKrunal MoreyNo ratings yet
- Modeling Evolution of Anisotropy and Hardening For Sheet MetalsDocument172 pagesModeling Evolution of Anisotropy and Hardening For Sheet MetalsKrunal MoreyNo ratings yet
- M. Nalla Mohamed, A. Praveen Kumar, A. Adil MalikDocument7 pagesM. Nalla Mohamed, A. Praveen Kumar, A. Adil MalikKrunal MoreyNo ratings yet
- Iacoviello,+Numero 49 Art 57Document13 pagesIacoviello,+Numero 49 Art 57Krunal MoreyNo ratings yet
- Novel AnisotropicDocument28 pagesNovel AnisotropicKrunal MoreyNo ratings yet
- Dislocation DynamicsDocument16 pagesDislocation DynamicsKrunal MoreyNo ratings yet
- Combined Effect of Damage and Plastic Anisotropy On The Ductility Limit of Thin Metal SheetsDocument8 pagesCombined Effect of Damage and Plastic Anisotropy On The Ductility Limit of Thin Metal SheetsKrunal MoreyNo ratings yet
- Materials 12Document19 pagesMaterials 12Krunal MoreyNo ratings yet
- Multi Surface Model Aniso BrittleDocument7 pagesMulti Surface Model Aniso BrittleKrunal MoreyNo ratings yet
- Localized Necking in Thin Sheet: Journal of The Mechanics and Physics of Solids December 1975Document22 pagesLocalized Necking in Thin Sheet: Journal of The Mechanics and Physics of Solids December 1975Krunal MoreyNo ratings yet
- A Comparison of Seismic Response To Conventional and Face Destress Blasting During Deep Tunnel DevelDocument14 pagesA Comparison of Seismic Response To Conventional and Face Destress Blasting During Deep Tunnel DevelEduardo CepedaNo ratings yet
- Dieless Wire Drawing-An Experimental and Numerical Analysis: P. Tiernan, M.T. HilleryDocument6 pagesDieless Wire Drawing-An Experimental and Numerical Analysis: P. Tiernan, M.T. HillerycostytzuNo ratings yet
- Grain Size StudyDocument14 pagesGrain Size StudyiyamNo ratings yet
- Del Linz-P-2014-PhD-ThesisDocument206 pagesDel Linz-P-2014-PhD-ThesisDanielaNo ratings yet
- Poisson RationDocument9 pagesPoisson RationJesus Colin CampuzanoNo ratings yet
- Study On Steel Fibre Used in Tunnel Segmental LiningDocument8 pagesStudy On Steel Fibre Used in Tunnel Segmental LiningYibinGongNo ratings yet
- Simrit 11 - General Technical Data & Materials (Technical Manual 2007)Document76 pagesSimrit 11 - General Technical Data & Materials (Technical Manual 2007)jo_rz_57No ratings yet
- Tension Test On Hot Rolled Plain Steel Bar (ASTM-A615/615-M)Document19 pagesTension Test On Hot Rolled Plain Steel Bar (ASTM-A615/615-M)Adil Javed Chaudhary67% (3)
- Assignment 1 Mech 321 Properties and Failure of Materials Jan 2009Document2 pagesAssignment 1 Mech 321 Properties and Failure of Materials Jan 2009DSGNo ratings yet
- Lecture#4 Strain MeasurementDocument5 pagesLecture#4 Strain MeasurementRenuga SubramaniamNo ratings yet
- Simulation of Brittle SolidsDocument13 pagesSimulation of Brittle Solidsdr_kh_ahmedNo ratings yet
- Selfbow Design Instructions ApendixDocument4 pagesSelfbow Design Instructions ApendixChrisNo ratings yet
- Finite Element Analysis On Horizontal Vessels With Saddle SupportsDocument9 pagesFinite Element Analysis On Horizontal Vessels With Saddle SupportsNIKHIL SHINDENo ratings yet
- LS-DYNA Concrete MaterialDocument3 pagesLS-DYNA Concrete MaterialaktcNo ratings yet
- Steel Fiber Reinforced ConcreteDocument24 pagesSteel Fiber Reinforced ConcreteDivya JalligampalaNo ratings yet
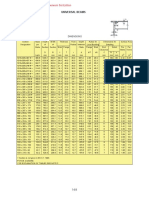
- P201: Handbook of Structural Steelwork 3rd Edition: Universal BeamsDocument44 pagesP201: Handbook of Structural Steelwork 3rd Edition: Universal Beamsmbhanusagar.keynesNo ratings yet
- Chapter 4. Compression Member Design: OughuDocument34 pagesChapter 4. Compression Member Design: OughuVigneshNo ratings yet
- Flexural Design of PC Elements Ch4iDocument22 pagesFlexural Design of PC Elements Ch4inagham tariqNo ratings yet
- Linear Algebra LessonsDocument20 pagesLinear Algebra Lessonsgolden kittenNo ratings yet
- Activity6 2c More Engineering ProblemsDocument7 pagesActivity6 2c More Engineering ProblemsChristianNo ratings yet
- Applications of Theory of Elasticity in Rock MechanicsDocument25 pagesApplications of Theory of Elasticity in Rock MechanicsRMolina65No ratings yet
- By Hamid R. Lotfi and P. Benson Shing, 2 Members, ASCE AbstractDocument18 pagesBy Hamid R. Lotfi and P. Benson Shing, 2 Members, ASCE AbstractafuhcivNo ratings yet
- 2 LaterallySupportedBeams 2012Document129 pages2 LaterallySupportedBeams 2012msenerNo ratings yet
- Elasticity and Thermal ExpansionDocument24 pagesElasticity and Thermal ExpansionAyush SrivastavNo ratings yet