You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 04pC Operations Manual PDFDocument62 pages04pC Operations Manual PDFGuillermo RamirezNo ratings yet
- Battery Sizing CalculationDocument11 pagesBattery Sizing CalculationZulfiker Heider83% (6)
- SP-01: English Communication and Presentation Skills Detailed Course OutlineDocument4 pagesSP-01: English Communication and Presentation Skills Detailed Course OutlineGul e NayabNo ratings yet
- MME CURRiculumDocument2 pagesMME CURRiculumGul e NayabNo ratings yet
- BS Mechanical Engineering Curriculum Map Map LegendDocument2 pagesBS Mechanical Engineering Curriculum Map Map LegendGul e NayabNo ratings yet
- BSME Curriculum MapDocument2 pagesBSME Curriculum MapGul e NayabNo ratings yet
- 2-Stator WindingDocument42 pages2-Stator WindingSuparnoWitoradyoNo ratings yet
- E650 Abbreviated Instruction: Component Identification Checking The Power ReserveDocument3 pagesE650 Abbreviated Instruction: Component Identification Checking The Power ReserveRick EngleNo ratings yet
- Automatic Irrigation System Using Micro Controller Main DocumentDocument16 pagesAutomatic Irrigation System Using Micro Controller Main DocumentSai Datta100% (2)
- Fuji Frenic-Vg7sDocument50 pagesFuji Frenic-Vg7sMathawee ChotchaiNo ratings yet
- Design of Analog Filters ShauumanDocument7 pagesDesign of Analog Filters ShauumanReem El-Adawi50% (4)
- Use of PWM Techniques For Power Quality Improvemen PDFDocument5 pagesUse of PWM Techniques For Power Quality Improvemen PDFnakkasrinuNo ratings yet
- KK C55 User ManualDocument5 pagesKK C55 User ManualKeshav BhatNo ratings yet
- Radar CH5Document15 pagesRadar CH5قصي جبار الخالديNo ratings yet
- 1307204324list of AFD I Items Other Than Automobiles As On 13 Jul 2020Document9 pages1307204324list of AFD I Items Other Than Automobiles As On 13 Jul 2020Sudhir Kumar VermaNo ratings yet
- User Manual: CAN Analyzer Hardware and SoftwareDocument27 pagesUser Manual: CAN Analyzer Hardware and SoftwareBayanaka TehnikNo ratings yet
- Product Guide: Clipsal C-BusDocument76 pagesProduct Guide: Clipsal C-BusGokul KrishnanNo ratings yet
- Cleaning Computer's Components and PeripheralsDocument27 pagesCleaning Computer's Components and PeripheralsMario OstonalNo ratings yet
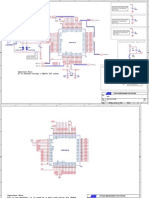
- Schematics Stk525Document5 pagesSchematics Stk525linuxlismNo ratings yet
- ITEM 1 XDG2000 Series Waveform Generator MOD MAR 2021Document20 pagesITEM 1 XDG2000 Series Waveform Generator MOD MAR 2021Carbon Nano TubeNo ratings yet
- 20 PrintersDocument4 pages20 PrintersHammad ZaidiNo ratings yet
- Led TV: User ManualDocument2 pagesLed TV: User Manualpernak pernik unikNo ratings yet
- MAg8000 ManualDocument164 pagesMAg8000 ManualrajsekharrajuNo ratings yet
- Microwave and Antennas ELC3510: Department of Electronics Engineering Aligarh Muslim University, AligarhDocument23 pagesMicrowave and Antennas ELC3510: Department of Electronics Engineering Aligarh Muslim University, AligarhAfzal MalikNo ratings yet
- Jntuk ALLResults 2012-2016 Results HubDocument3 pagesJntuk ALLResults 2012-2016 Results HubBaswamy CseNo ratings yet
- Design and Development of Microstrip Sensor With Triple Frequency For Determination of Rice Grains Moisture ContentDocument6 pagesDesign and Development of Microstrip Sensor With Triple Frequency For Determination of Rice Grains Moisture ContentTJPRC PublicationsNo ratings yet
- Literature Review On Digital Fan RegulatorDocument4 pagesLiterature Review On Digital Fan Regulatorafmzxhvgfvprhm100% (1)
- Can CrusherDocument81 pagesCan CrusherJhon Don100% (1)
- A161/A162 COPIER Service ManualDocument9 pagesA161/A162 COPIER Service Manualصابر الصابرNo ratings yet
- TD0040Document25 pagesTD0040mihai37100% (1)
- DEA TSI Waverock Report - 28th May 2014 2003 FormatDocument95 pagesDEA TSI Waverock Report - 28th May 2014 2003 FormatRaja RamachandranNo ratings yet
- 13 Foth ZFDocument29 pages13 Foth ZFDaniel Alex SánchezNo ratings yet
- Service Repair: N45ZR N35ZDR (C264)Document16 pagesService Repair: N45ZR N35ZDR (C264)MONTACARGAS AVSNo ratings yet
- Eclipse 200 ManualDocument30 pagesEclipse 200 ManualIngeniería BioquímicaNo ratings yet