You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Syllabus in Invertebrate ZoologyDocument11 pagesSyllabus in Invertebrate ZoologyAnonymous lKxkZ9MNo ratings yet
- Steam Tracer Header and Branch Connection DetailsDocument1 pageSteam Tracer Header and Branch Connection DetailsSathiyaseelan Sakthi ShanmugamNo ratings yet
- 4-Malayalam InternationalDocument51 pages4-Malayalam InternationalSASHMIRA MENONNo ratings yet
- Eatwell Guide BookletDocument12 pagesEatwell Guide BookletPaul des Perrieres100% (1)
- 128 Pid 98-1-2Document2 pages128 Pid 98-1-2Khinmg Aye 554No ratings yet
- RC CircuitsDocument11 pagesRC Circuits2456903No ratings yet
- Protected Areas in The PhilippinesDocument7 pagesProtected Areas in The PhilippinesPaula TobiasNo ratings yet
- Final Report About HVDC TECHNOLOGYDocument21 pagesFinal Report About HVDC TECHNOLOGYSefu BikorimanaNo ratings yet
- Piña Chan y Navarrete-Archaeological Research in The Lower Grijalva River RegionDocument65 pagesPiña Chan y Navarrete-Archaeological Research in The Lower Grijalva River RegionggarfuNo ratings yet
- The Second Religiousness in The 21st CenturyDocument9 pagesThe Second Religiousness in The 21st CenturyHaruhi SuzumiyaNo ratings yet
- MS 8904 - Standard Costing Variance AnalysisDocument7 pagesMS 8904 - Standard Costing Variance Analysisxara mizpahNo ratings yet
- 2 - 5201750207762531221 EntDocument561 pages2 - 5201750207762531221 EntArun Raj100% (1)
- MSDS Silica Sand MaterialSafetyDataSheetDocument12 pagesMSDS Silica Sand MaterialSafetyDataSheetOziel RomeroNo ratings yet
- Pune MIDCDocument36 pagesPune MIDCAvik Sarkar100% (2)
- Manual - SSC IDocument22 pagesManual - SSC IThilaga MohanNo ratings yet
- Lab 8 v2Document7 pagesLab 8 v2ali basitNo ratings yet
- Design of First and Second Order Circuits in Time and Frequency DomainDocument40 pagesDesign of First and Second Order Circuits in Time and Frequency DomainsravanNo ratings yet
- Lab Experiment N 2, Diode Applications RectifiersDocument18 pagesLab Experiment N 2, Diode Applications RectifiersSeif-El-Islam BayNo ratings yet
- Lec6 - Diode RectifiersDocument47 pagesLec6 - Diode RectifiersMA KhanNo ratings yet
- The RC CircuitDocument8 pagesThe RC CircuitNadineNo ratings yet
- STI PAC1 Fall 2017 - SolvedDocument4 pagesSTI PAC1 Fall 2017 - SolvedMarta Bordonaba Del RioNo ratings yet
- Exp 3Document7 pagesExp 3Enas QtaifanNo ratings yet
- EEE 4308L Electronics I Laboratory Laboratory #1 Operational Amplifier-Based IntegratorsDocument19 pagesEEE 4308L Electronics I Laboratory Laboratory #1 Operational Amplifier-Based IntegratorsnoneNo ratings yet
- ELECS 1 Experiment #3Document20 pagesELECS 1 Experiment #3Aldrin ManeseNo ratings yet
- PSA Lab 4 ReportDocument8 pagesPSA Lab 4 ReportMovie Trailers blazeNo ratings yet
- A Simplified Analysis and Design of The Rectifier With Capacitive FilterDocument8 pagesA Simplified Analysis and Design of The Rectifier With Capacitive Filterilet09No ratings yet
- EC3058D-VLSI Circuits and Systems Winter Semester-2020-21Document2 pagesEC3058D-VLSI Circuits and Systems Winter Semester-2020-21Gamer AnonymousNo ratings yet
- Design and Simulation of Half Wave Rectifier On MATLABDocument29 pagesDesign and Simulation of Half Wave Rectifier On MATLABAhmed Ahmed MohamedNo ratings yet
- Dar Es Salaam Institute of Technology: Electronics and Telecommunication EngineeringDocument13 pagesDar Es Salaam Institute of Technology: Electronics and Telecommunication EngineeringSokoine Hamad DenisNo ratings yet
- Cycle IDocument32 pagesCycle Idivya1587No ratings yet
- Tutorial Problems: Bipolar Junction Transistor (Basic BJT Amplifiers)Document23 pagesTutorial Problems: Bipolar Junction Transistor (Basic BJT Amplifiers)vineetha nagahageNo ratings yet
- Bee Lab ManualDocument60 pagesBee Lab Manualravi828No ratings yet
- Isro 2018Document71 pagesIsro 2018gnanarani nambiNo ratings yet
- Concept:: 1 2, 3 .. N 1m 2m, 3m .. NM M M MDocument26 pagesConcept:: 1 2, 3 .. N 1m 2m, 3m .. NM M M Mmanohar487No ratings yet
- Electrical Simulation Lab: EEE 454 IV Sem EN BranchDocument28 pagesElectrical Simulation Lab: EEE 454 IV Sem EN Branchsachin10dulkarNo ratings yet
- Lecture 5Document29 pagesLecture 5ahmed mahmoudNo ratings yet
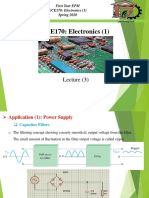
- ECE170: Electronics (1) : LectureDocument40 pagesECE170: Electronics (1) : LectureKhaled MohamedNo ratings yet
- 6.002 Midterm2 F18Document19 pages6.002 Midterm2 F18VD CommentNo ratings yet
- Updated Simlab ManualDocument46 pagesUpdated Simlab ManualSumanthNo ratings yet
- Physics SectionDocument18 pagesPhysics SectionMahmoud Abdel-SalamNo ratings yet
- V + V P /V: SolutionDocument12 pagesV + V P /V: SolutionNani Chori ShresthaNo ratings yet
- Bee Lab ManualDocument62 pagesBee Lab ManualSwetha VanamNo ratings yet
- Basic Electronics Lab (Experiment 2 Report) : Submitted By: Group: G7 Ashutosh Garg (2018MEB1213) Ashwin Goyal (2018MEB1214)Document8 pagesBasic Electronics Lab (Experiment 2 Report) : Submitted By: Group: G7 Ashutosh Garg (2018MEB1213) Ashwin Goyal (2018MEB1214)Ashutosh GargNo ratings yet
- E6 - Dis - Charging A Capacitor 18Document4 pagesE6 - Dis - Charging A Capacitor 18Prof. ChrisNo ratings yet
- Exp5 Full Wave RectifierDocument8 pagesExp5 Full Wave RectifierFrew FrewNo ratings yet
- Report About HVDCDocument21 pagesReport About HVDCSefu BikorimanaNo ratings yet
- Bai Tap Ve BJT3Document23 pagesBai Tap Ve BJT3nguyenphuonghuy1979No ratings yet
- Renewable Energy Engineering-Year 2-: Teacher: Mrs Afef BENNANIDocument10 pagesRenewable Energy Engineering-Year 2-: Teacher: Mrs Afef BENNANIYoussef KamounNo ratings yet
- Experiment 3-RCDocument6 pagesExperiment 3-RCkokoh20No ratings yet
- Answers FinalDocument20 pagesAnswers FinalMario HanyNo ratings yet
- Unit I - IIDocument10 pagesUnit I - IINarendra SNo ratings yet
- Analog Communications Lab ManualDocument61 pagesAnalog Communications Lab ManualSriLakshmi RaheemNo ratings yet
- EE 302 Final Exam and Histogram F12 PDFDocument4 pagesEE 302 Final Exam and Histogram F12 PDFAnonymous BKSqKEQhnuNo ratings yet
- EE 5021: Power Converter Analysis and Design Sept2020-Jan2021 Assignment 3Document3 pagesEE 5021: Power Converter Analysis and Design Sept2020-Jan2021 Assignment 3Raj JhaNo ratings yet
- Lab 6 Report: 1 Differential AmplifierDocument7 pagesLab 6 Report: 1 Differential AmplifierWilliam ChruchillNo ratings yet
- T3 TugasDocument15 pagesT3 TugasSri rahayuNo ratings yet
- Free-Samples Amie Chapters Induction-Motor-DesignDocument35 pagesFree-Samples Amie Chapters Induction-Motor-DesignGlen TuranganNo ratings yet
- Experiment 3 - Center Tapped Full Wave RectifierDocument6 pagesExperiment 3 - Center Tapped Full Wave RectifierRandred GarciaNo ratings yet
- Lectures 6 & 7 - Uncontrolled (Diode) Rectifier Circuits: Single-Phase Center-Tapped RectifierDocument21 pagesLectures 6 & 7 - Uncontrolled (Diode) Rectifier Circuits: Single-Phase Center-Tapped RectifierTommy ManNo ratings yet
- Canara 10EEL78 - PSS - 2013 - Manual PDFDocument64 pagesCanara 10EEL78 - PSS - 2013 - Manual PDFoijhgvcxNo ratings yet
- RC Circuits - George Ricarrson 2501987261Document9 pagesRC Circuits - George Ricarrson 2501987261George RYNo ratings yet
- Exercise 3 - Summer Semester 2019Document8 pagesExercise 3 - Summer Semester 2019Mario PajaNo ratings yet
- Test-1 (Mains) - Electrical EnggDocument5 pagesTest-1 (Mains) - Electrical EnggRitsheNo ratings yet
- Time Constant of RC CircuitDocument13 pagesTime Constant of RC CircuitADRMNo ratings yet
- Full Wave Bridge Peak RectifierDocument4 pagesFull Wave Bridge Peak RectifierMuhammad TehreemNo ratings yet
- Induction Motor DesignDocument35 pagesInduction Motor DesignGajendra TeliNo ratings yet
- Pe SS Final Ex 2010Document4 pagesPe SS Final Ex 2010Saif UddinNo ratings yet
- (ECEN 4797 and ECEN 5797) Two-Transistor Forward Converter: Modeling, Design and SimulationsDocument2 pages(ECEN 4797 and ECEN 5797) Two-Transistor Forward Converter: Modeling, Design and SimulationsMaharshiGohelNo ratings yet
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- Ecosys Technology.: Economical. EcologicalDocument2 pagesEcosys Technology.: Economical. EcologicalvijaiNo ratings yet
- AP SEC FORM 17-A - 2021 Annual Report (Full Report)Document434 pagesAP SEC FORM 17-A - 2021 Annual Report (Full Report)Fiverr RallNo ratings yet
- Easy Method For Testing Transformer Differential RelaysDocument12 pagesEasy Method For Testing Transformer Differential Relaysntayyebi100% (1)
- 26.WJNF A 874962 O11 PDFDocument14 pages26.WJNF A 874962 O11 PDFKate Andrea LacsonNo ratings yet
- Stedman, James - Aristotle and Modern Cognitive Psychology and NeuroscienceDocument13 pagesStedman, James - Aristotle and Modern Cognitive Psychology and NeuroscienceTommaso BartoliniNo ratings yet
- Biological Control - A Major Component of Pest ControlDocument16 pagesBiological Control - A Major Component of Pest ControlNorberto R. BautistaNo ratings yet
- V 4 in Vivo Degradation Behaviour and Bone Response of A New Mg-Rare EarthDocument12 pagesV 4 in Vivo Degradation Behaviour and Bone Response of A New Mg-Rare EarthVidya me20d015No ratings yet
- Huggenberger EDU en 01Document1 pageHuggenberger EDU en 01filmulogNo ratings yet
- Condition Report: Residential Tenancy AgreementDocument7 pagesCondition Report: Residential Tenancy AgreementMikeNo ratings yet
- Monuments of The Kathmandu Valley - John Sanday@Comics4nostalgiaDocument117 pagesMonuments of The Kathmandu Valley - John Sanday@Comics4nostalgiaBipin Bazracharya100% (1)
- Ward Equivalent PDFDocument24 pagesWard Equivalent PDFArindam MitraNo ratings yet
- Spec Sheet-Enduron HPGR-global-07-2015Document1 pageSpec Sheet-Enduron HPGR-global-07-2015Hasna BraiekNo ratings yet
- Submitted T0: Mrs - PARUL Nishant Chaturvedi (PGT, Commerse) Xi - (Commerse)Document17 pagesSubmitted T0: Mrs - PARUL Nishant Chaturvedi (PGT, Commerse) Xi - (Commerse)tajju_121No ratings yet
- Time TableDocument1 pageTime TableAbhishek ChandraNo ratings yet
- Container Details PDFDocument2 pagesContainer Details PDFVivekNo ratings yet
- Chapter 1 DrillsimDocument10 pagesChapter 1 DrillsimMehdi SoltaniNo ratings yet
- Handout RPS - V1.0Document121 pagesHandout RPS - V1.0Adegbola AdedipeNo ratings yet
- Spectacle Blind 8-600 FFDocument2 pagesSpectacle Blind 8-600 FFJovianto PrisilaNo ratings yet