You might also like
- P22x EN TDS B44Document46 pagesP22x EN TDS B44Paneendra KumarNo ratings yet
- CAN Multi Turns User Manual V2.2Document12 pagesCAN Multi Turns User Manual V2.2monarisNo ratings yet
- SEM228A ManualDocument8 pagesSEM228A ManualrarizalarifNo ratings yet
- Temperature and Humidity Transmitter User Manual: 1. Product DescriptionDocument8 pagesTemperature and Humidity Transmitter User Manual: 1. Product DescriptionNguyễn Huy HoàngNo ratings yet
- GY-53-L1X English Use GuideDocument7 pagesGY-53-L1X English Use GuideHeidi LewNo ratings yet
- Wind Speed SensorDocument17 pagesWind Speed SensorablonczydNo ratings yet
- RS-WD-HW-N01 485 Infrared Temperature Sensor User Manual: Document Version V1.0Document8 pagesRS-WD-HW-N01 485 Infrared Temperature Sensor User Manual: Document Version V1.0NILTON RAMOS ESTEBANNo ratings yet
- BRT38 Hall Absolute Encoder - Drawing DimesionDocument2 pagesBRT38 Hall Absolute Encoder - Drawing DimesionAnandhsNo ratings yet
- L011443 - K2 PLC Spec SheetDocument3 pagesL011443 - K2 PLC Spec SheetMustafa El-saeedNo ratings yet
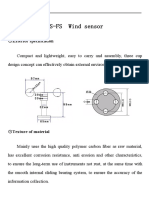
- Qs-Fs Wind Sensor: Exterior SpecificationDocument8 pagesQs-Fs Wind Sensor: Exterior Specificationthang doanNo ratings yet
- SM43 J R20 Especificacao TecnicaDocument4 pagesSM43 J R20 Especificacao TecnicaMarcoNo ratings yet
- Flexem HMI Sistemas de SuplenciaDocument5 pagesFlexem HMI Sistemas de SuplenciaAnonymous awwd0cnNo ratings yet
- Vision™ OPLC™: V350-35-T2/V350-J-T2 Technical SpecificationsDocument5 pagesVision™ OPLC™: V350-35-T2/V350-J-T2 Technical SpecificationsFrank Almenares UrzolaNo ratings yet
- COD Modbus InstructionDocument18 pagesCOD Modbus InstructionkepyarNo ratings yet
- Um 005Document7 pagesUm 005kaiss_123No ratings yet
- Temperature TransducerDocument6 pagesTemperature TransducerASIF KHANNo ratings yet
- R303A User ManualDocument23 pagesR303A User ManualSyed AameerNo ratings yet
- SDM630 Smart Meter Modbus Protocol GuideDocument13 pagesSDM630 Smart Meter Modbus Protocol GuideKunanon JaitrongNo ratings yet
- rc3d Leg Datasheet enDocument3 pagesrc3d Leg Datasheet ensrinivas raghavanNo ratings yet
- CHI MEI Pt650d Instruction ManualDocument63 pagesCHI MEI Pt650d Instruction ManualBalanças EstaticaNo ratings yet
- ADM-4280A User's ManualDocument11 pagesADM-4280A User's ManualbudiismoyoNo ratings yet
- Arn-Ts2D: Digital Tilt SensorDocument4 pagesArn-Ts2D: Digital Tilt Sensormari nNo ratings yet
- VT-300 Atmospheric Temperture Humidity User Manual v5.0Document3 pagesVT-300 Atmospheric Temperture Humidity User Manual v5.0Eisac SagimanNo ratings yet
- FLEXEM - Resistive HMI 4000 SeriesDocument5 pagesFLEXEM - Resistive HMI 4000 Seriesbassit82No ratings yet
- Digital Weighing Indicator XK3190-A12 (E) : User ManualDocument17 pagesDigital Weighing Indicator XK3190-A12 (E) : User ManualMuhammad Rizki SetiawanNo ratings yet
- 6AG11376AA017BA0 Datasheet enDocument3 pages6AG11376AA017BA0 Datasheet ensarah.elfishawyNo ratings yet
- R21D ID RS232 ReaderDocument2 pagesR21D ID RS232 ReadernalgrstealthNo ratings yet
- General Description: PT650F Instruction Manual 1Document10 pagesGeneral Description: PT650F Instruction Manual 1AbubackerNo ratings yet
- 392 027724 2 2Document4 pages392 027724 2 2perez_zeusNo ratings yet
- SDM630MCT Protocol-Nov-14Document14 pagesSDM630MCT Protocol-Nov-14Kadir OrtegaNo ratings yet
- KV-N60AR DatasheetDocument4 pagesKV-N60AR Datasheetasrulnizam matnorNo ratings yet
- JMX568 Data Sheet Ver A2Document13 pagesJMX568 Data Sheet Ver A2Anonymous o2N2OMhUBd100% (1)
- Ultrasonic Fuel Sensor User Manual - 181129Document11 pagesUltrasonic Fuel Sensor User Manual - 181129Carlos MontalvanNo ratings yet
- 6ES72121BD300XB0 Datasheet enDocument5 pages6ES72121BD300XB0 Datasheet ensalin zambranoNo ratings yet
- XZ-DG4 Technical Datasheet V21Document11 pagesXZ-DG4 Technical Datasheet V21Ricardo Mendez VargasNo ratings yet
- DFDFDFDFDDocument30 pagesDFDFDFDFDRaju KalyadapuNo ratings yet
- PT650f e 2002Document67 pagesPT650f e 2002lehahai100% (4)
- MH-Z19C-DZ-terminal Type CO2 Manual (Ver1.21) - 202103Document9 pagesMH-Z19C-DZ-terminal Type CO2 Manual (Ver1.21) - 202103testNo ratings yet
- Intelligent Infrared Carbon Dioxide Module (Model: MH-Z14A) : Issue Date. May 5, 2019Document10 pagesIntelligent Infrared Carbon Dioxide Module (Model: MH-Z14A) : Issue Date. May 5, 2019udara11No ratings yet
- Dokumen - Tips Cb900ke0203Document73 pagesDokumen - Tips Cb900ke0203Anh DucNo ratings yet
- ARANKA AIEF17 MODBUS ManualDocument15 pagesARANKA AIEF17 MODBUS ManualBinayak GhoshNo ratings yet
- HPC168 Passenger CounterDocument9 pagesHPC168 Passenger CounterRommel GómezNo ratings yet
- PH 1.5-Modbus InstructionDocument20 pagesPH 1.5-Modbus InstructionkepyarNo ratings yet
- TFmini Plus LiDAR SpecsDocument6 pagesTFmini Plus LiDAR SpecssteedNo ratings yet
- Economic Capacitive HmisDocument7 pagesEconomic Capacitive HmisJes ChuzNo ratings yet
- Pmac735 Modbus Register ListDocument31 pagesPmac735 Modbus Register ListjesankingNo ratings yet
- JCQ-8D Manual Instruction - 1Document9 pagesJCQ-8D Manual Instruction - 1MinhNo ratings yet
- Sigma2 Modbus - Jan 2016Document19 pagesSigma2 Modbus - Jan 2016Dave PotterNo ratings yet
- Es35 SW User Manual enDocument18 pagesEs35 SW User Manual enThái Trung TàiNo ratings yet
- XC3-24R-E PLC Controller 14 Inputs 10 Relay OutputsDocument4 pagesXC3-24R-E PLC Controller 14 Inputs 10 Relay OutputsgarylikeuNo ratings yet
- FAR Ultrasonic Wind SensorDocument4 pagesFAR Ultrasonic Wind Sensorkiên phạm trungNo ratings yet
- FLEXEM - Capacitive HMI 5000 Series Module : Isolated Power SupplyDocument5 pagesFLEXEM - Capacitive HMI 5000 Series Module : Isolated Power Supplybassit82No ratings yet
- ATO-TQS-D03 Digital Rotary Torque Sensor User ManualDocument7 pagesATO-TQS-D03 Digital Rotary Torque Sensor User ManualAung Naing OoNo ratings yet
- CPU 6ES72141BG400XB0 Datasheet enDocument9 pagesCPU 6ES72141BG400XB0 Datasheet enMitrita ZanetNo ratings yet
- Frsky D6FR ProtocolDocument4 pagesFrsky D6FR ProtocoljuansallasNo ratings yet
- SI-MAG110 ModBus Ptotocol ManualDocument12 pagesSI-MAG110 ModBus Ptotocol ManualSatya BarikNo ratings yet
- WJ69产品说明书V1 1Document21 pagesWJ69产品说明书V1 1John EerlNo ratings yet
- WSC1 ST Year NSQFFinalDocument186 pagesWSC1 ST Year NSQFFinalssegl 42No ratings yet
- MODBUS/TCP Network Module: Selection Guide Edition 19 - Revised April 1, 2019Document1 pageMODBUS/TCP Network Module: Selection Guide Edition 19 - Revised April 1, 2019AnandhsNo ratings yet
- BRUTER BRT38-ROM Encoder RS485 ProtocolDocument5 pagesBRUTER BRT38-ROM Encoder RS485 ProtocolAnandhsNo ratings yet
- CNC Lathe G-M Code ListDocument2 pagesCNC Lathe G-M Code ListAnandhsNo ratings yet
- BRT38 Hall Absolute Encoder - Drawing DimesionDocument2 pagesBRT38 Hall Absolute Encoder - Drawing DimesionAnandhsNo ratings yet
- Uface302: Multi-Biometric T&A and Access Control TerminalDocument2 pagesUface302: Multi-Biometric T&A and Access Control TerminalAnandhsNo ratings yet
- Past Life Discov Integration 96Document127 pagesPast Life Discov Integration 9677felix100% (1)
- SMART GLASS DATA SHEET v2Document3 pagesSMART GLASS DATA SHEET v2ayham.kuwait.2018No ratings yet
- Modernizing Classical Physics Experiments with Sensors and MicrocontrollersDocument24 pagesModernizing Classical Physics Experiments with Sensors and MicrocontrollersAnonymous mMc1M4g5BHNo ratings yet
- Exp #3: Temperature Transducers: Objectives: To Understand The Operation of Thermistors and Realization of A TemperatureDocument15 pagesExp #3: Temperature Transducers: Objectives: To Understand The Operation of Thermistors and Realization of A TemperatureKhawar RiazNo ratings yet
- Comp Woofer: Technical SpecificationDocument1 pageComp Woofer: Technical SpecificationIvan PetrovNo ratings yet
- The Managing Director Odogunyan Industrial Estate Ikorodu - Lagos State Attention: MRDocument3 pagesThe Managing Director Odogunyan Industrial Estate Ikorodu - Lagos State Attention: MROlayiwola OnasanyaNo ratings yet
- Saudi Arabian Oil Company: 5.5 TANK H45-D-8B Fire Detection & Foam Skid H45-U-0104 ActivationDocument2 pagesSaudi Arabian Oil Company: 5.5 TANK H45-D-8B Fire Detection & Foam Skid H45-U-0104 Activationsalman1111aNo ratings yet
- Hardgrove Grindability Manual-1Document3 pagesHardgrove Grindability Manual-1Milos RadojevicNo ratings yet
- Networks: Dr. S.Meenatchi, SITE, VITDocument29 pagesNetworks: Dr. S.Meenatchi, SITE, VITDhanwanth JPNo ratings yet
- circutor max12-This manual is an easy guide for the use and operation of the Computer max 6/max 12. For more information, the complete manual can be downloaded from the web site of Circutor: www.circutor.es Any manipulation or use of the equipment out of the conditions specified by the manufacturer may put in risk the user safety. Before any maintenance operation the equipment must be disconnected from power supply. In case of miss operation or protection fault the equipment must be disconnected from supply and remain out of service ensuring against anyDocument2 pagescircutor max12-This manual is an easy guide for the use and operation of the Computer max 6/max 12. For more information, the complete manual can be downloaded from the web site of Circutor: www.circutor.es Any manipulation or use of the equipment out of the conditions specified by the manufacturer may put in risk the user safety. Before any maintenance operation the equipment must be disconnected from power supply. In case of miss operation or protection fault the equipment must be disconnected from supply and remain out of service ensuring against anybaguspermana7No ratings yet
- TTB-809015 182017 182017de-65fDocument1 pageTTB-809015 182017 182017de-65fhasib_muhammedNo ratings yet
- Fault Current Limiters Report On The Activities of CIGRE WG A3.10Document9 pagesFault Current Limiters Report On The Activities of CIGRE WG A3.10Sameer MalikNo ratings yet
- UPS Battery Maintenance 101 - EC&MDocument6 pagesUPS Battery Maintenance 101 - EC&MZiad BadrNo ratings yet
- Declaration: Synchronization of Multiple Motors in Industries " Is ADocument10 pagesDeclaration: Synchronization of Multiple Motors in Industries " Is Acity cyberNo ratings yet
- Group 3 Electrical Circuit OperationDocument14 pagesGroup 3 Electrical Circuit OperationTrần Quang ThuậnNo ratings yet
- Moto Guzzi Breva 1100 Manuale RiparazioneDocument106 pagesMoto Guzzi Breva 1100 Manuale RiparazioneAndrea NeriNo ratings yet
- Lecture 2Document41 pagesLecture 2trongnhansuper1No ratings yet
- Application Note An-00140: The FCC Road: Part 15 From Concept To ApprovalDocument2 pagesApplication Note An-00140: The FCC Road: Part 15 From Concept To Approvalinsomnium86No ratings yet
- 400 KV XLPE Cables Link Hydro Power Plant Transformers to GISDocument4 pages400 KV XLPE Cables Link Hydro Power Plant Transformers to GISsalvandyNo ratings yet
- Basics of Plc-Number SystemDocument44 pagesBasics of Plc-Number SystemDhanush SNo ratings yet
- TWDLMDA20DRT Product Data SheetDocument10 pagesTWDLMDA20DRT Product Data Sheetjoel_garcia_leeNo ratings yet
- MWO SI BrochureDocument4 pagesMWO SI BrochureAWR CorporationNo ratings yet
- No global clock in parallel computing uses synchronizationDocument7 pagesNo global clock in parallel computing uses synchronizationEllish ErisNo ratings yet
- LAB REPORT 1 Digital SystemDocument4 pagesLAB REPORT 1 Digital SystemKhairul Naim100% (1)
- Electrical Wiring Diagram Books PDFDocument109 pagesElectrical Wiring Diagram Books PDFHillaryNo ratings yet
- Odsi-090r17l02-Q DS 1-0-3 - 1Document4 pagesOdsi-090r17l02-Q DS 1-0-3 - 1romoNo ratings yet
- Agc From EtapDocument8 pagesAgc From EtapKiran KarthikNo ratings yet
- VadrajjDocument21 pagesVadrajjMahendra BoranaNo ratings yet
- CS8603 Distributed System Model QuestionDocument2 pagesCS8603 Distributed System Model QuestionPrasanna50% (2)
- Diode Equation ModelsDocument24 pagesDiode Equation ModelsJayann GonzalesNo ratings yet