You might also like
- Wopho ProblemsDocument17 pagesWopho Problemshantarto5844100% (1)
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- On The Low Frequency Elastic Response of A Spherical ParticleDocument8 pagesOn The Low Frequency Elastic Response of A Spherical ParticlesteveNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Matt Visser - Traversable Wormholes: Some Simple ExamplesDocument7 pagesMatt Visser - Traversable Wormholes: Some Simple ExamplesRtpomNo ratings yet
- Wopho Problems PDFDocument17 pagesWopho Problems PDFIonel ChiosaNo ratings yet
- Orthotropic Skew Slab - Coull PDFDocument13 pagesOrthotropic Skew Slab - Coull PDFjnshreyNo ratings yet
- Sliding On The Inside of A Conical Surface: R. L Opez-Ruiz and A. F. PachecoDocument26 pagesSliding On The Inside of A Conical Surface: R. L Opez-Ruiz and A. F. PachecoSubhankar HowladerNo ratings yet
- Advances in Structure Research by Diffraction Methods: Fortschritte der Strukturforschung mit BeugungsmethodenFrom EverandAdvances in Structure Research by Diffraction Methods: Fortschritte der Strukturforschung mit BeugungsmethodenR. BrillNo ratings yet
- Gauging Away Polarization States of WavesDocument5 pagesGauging Away Polarization States of WavesJovan OdavicNo ratings yet
- Lin Stab AnalysisDocument7 pagesLin Stab AnalysisMohammad RameezNo ratings yet
- 1 Bragg Scattering in A Periodic Medium: 1.138J/2.062J/18.376J, WAVE PROPAGATIONDocument15 pages1 Bragg Scattering in A Periodic Medium: 1.138J/2.062J/18.376J, WAVE PROPAGATIONwenceslaoflorezNo ratings yet
- Linton 1991 - RADIATION AND DIFFRACTION OF WATER WAVES BY A SUBMERGED SPHERE IN FINITE DEPTHDocument14 pagesLinton 1991 - RADIATION AND DIFFRACTION OF WATER WAVES BY A SUBMERGED SPHERE IN FINITE DEPTHNadji ChiNo ratings yet
- Solved ProblemsDocument43 pagesSolved ProblemsTamara HerediaNo ratings yet
- Accelerated Scalar Dissipation in A Vortex: Byp - Flohr J.C.VassilicosDocument23 pagesAccelerated Scalar Dissipation in A Vortex: Byp - Flohr J.C.VassilicosSimona DraghiciNo ratings yet
- FlnotesDocument165 pagesFlnotesRodrigo GarcíaNo ratings yet
- Potential ScatteringDocument54 pagesPotential ScatteringChandrakant ChatterjeeNo ratings yet
- Aieee-2012 Physics SolutionsDocument5 pagesAieee-2012 Physics SolutionsAman Bhutta100% (1)
- Behaviour of bolted circular flange joints under bending & axial loadsDocument10 pagesBehaviour of bolted circular flange joints under bending & axial loadsarkadjyothiprakashNo ratings yet
- J. R. Herring Et Al - Statistical and Dynamical Questions in Strati Ed TurbulenceDocument23 pagesJ. R. Herring Et Al - Statistical and Dynamical Questions in Strati Ed TurbulenceWhiteLighteNo ratings yet
- Yuan-Xiu Miao Et Al - Coexisting Condensates of Weakly Interacting Bose Gas in A Harmonic TrapDocument5 pagesYuan-Xiu Miao Et Al - Coexisting Condensates of Weakly Interacting Bose Gas in A Harmonic TrapQMDhidnwNo ratings yet
- VectorsDocument82 pagesVectorsNaledi xuluNo ratings yet
- A: Dispersive and Nondispersive WavesDocument10 pagesA: Dispersive and Nondispersive WavesKyungHwan OhNo ratings yet
- Engineering Fracture Mechanics Formulas for Dynamic Crack Stress Intensity FactorsDocument4 pagesEngineering Fracture Mechanics Formulas for Dynamic Crack Stress Intensity FactorsvhgaitanNo ratings yet
- Lattice Dynamics - 1: Book References: Solid State Physics by A. J. Dekker Solid State Physics by D. S. BlakemoreDocument12 pagesLattice Dynamics - 1: Book References: Solid State Physics by A. J. Dekker Solid State Physics by D. S. BlakemorePragyaNo ratings yet
- State-Of-The-Art of Research On Seismic Pounding Between Buildings With Aligned SlabsDocument24 pagesState-Of-The-Art of Research On Seismic Pounding Between Buildings With Aligned SlabsRui CbNo ratings yet
- Takashi Okamoto - Introduction To WormholesDocument14 pagesTakashi Okamoto - Introduction To WormholesHerftezNo ratings yet
- Potential Scattering: 2. Also in This Section, We Consider The Threshold Behaviour WhenDocument54 pagesPotential Scattering: 2. Also in This Section, We Consider The Threshold Behaviour WhenAlessandra Souza BarbosaNo ratings yet
- The Second-Order Theory of Heaving Cylinders in A Free SurfaceDocument15 pagesThe Second-Order Theory of Heaving Cylinders in A Free SurfacevictorNo ratings yet
- Y. Aharonov and T. Kaufherr - The Effect of A Magnetic Flux Line in Quantum TheoryDocument4 pagesY. Aharonov and T. Kaufherr - The Effect of A Magnetic Flux Line in Quantum Theory23213mNo ratings yet
- Tesch - On Invariants of Fluid Mechanics TensorsDocument8 pagesTesch - On Invariants of Fluid Mechanics TensorsSandeepNo ratings yet
- ES912 ExamppDocument4 pagesES912 ExamppgetsweetNo ratings yet
- Interatomic Potentials: Atoms Attract EaDocument9 pagesInteratomic Potentials: Atoms Attract EaDeri Andika BangunNo ratings yet
- Phys Sample GDocument11 pagesPhys Sample GAbhijit SanjeevNo ratings yet
- EmonopolDocument3 pagesEmonopolFlavio FontanaNo ratings yet
- Orbit DecayDocument5 pagesOrbit DecayJames MorseNo ratings yet
- Resonant Transport in Coupled Quantum Wells: A Probe For Scattering MechanismsDocument10 pagesResonant Transport in Coupled Quantum Wells: A Probe For Scattering MechanismsBayer MitrovicNo ratings yet
- p117 - LuminosityDocument14 pagesp117 - LuminosityMicMasNo ratings yet
- Kinetic Energy in Laminar Pipe FlowDocument4 pagesKinetic Energy in Laminar Pipe FlowCamille CrnNo ratings yet
- Turbulent ProblemsDocument15 pagesTurbulent ProblemsmukeshsinghtomarNo ratings yet
- STOKES DRAG Derivation PDFDocument4 pagesSTOKES DRAG Derivation PDFVadiraj HemadriNo ratings yet
- Stokes Drag FormulaDocument4 pagesStokes Drag FormulaAhmed UsmanNo ratings yet
- M. Axenides Et Al - Q RingsDocument4 pagesM. Axenides Et Al - Q RingsPomac232No ratings yet
- Stresses in spherical vessels from radial and moment loadsDocument11 pagesStresses in spherical vessels from radial and moment loadsbahmanNo ratings yet
- MIT OCW Wave Propagation Lecture Part 5Document22 pagesMIT OCW Wave Propagation Lecture Part 5Mohan NayakaNo ratings yet
- Chapt 6Document15 pagesChapt 6morphos777No ratings yet
- Silvertooth PDFDocument5 pagesSilvertooth PDFLusi FlorovaNo ratings yet
- Induced Fermion Current in the O(3) Model in (2+1) DimensionsDocument4 pagesInduced Fermion Current in the O(3) Model in (2+1) DimensionsAngel EduardoNo ratings yet
- Wamit Theory ManualDocument66 pagesWamit Theory Manualspsingh72No ratings yet
- O N Estimation of The Displacement in An Earthquake Source and of Source DimensionsDocument10 pagesO N Estimation of The Displacement in An Earthquake Source and of Source DimensionsketansingharoyNo ratings yet
- Phonon dispersion relation with two atoms per unit cellDocument7 pagesPhonon dispersion relation with two atoms per unit cellabdul karim syahbaniNo ratings yet
- Phy102 Part1 Set2Document3 pagesPhy102 Part1 Set2Rajesh ChoudharyNo ratings yet
- 2016 Note On Stresses Chimney Due To Wind-Hoefakker & BlaauwendraadDocument10 pages2016 Note On Stresses Chimney Due To Wind-Hoefakker & BlaauwendraadOmar AvilaNo ratings yet
- Physics homework solutions for chapter 23 problemsDocument12 pagesPhysics homework solutions for chapter 23 problemsSandeep BadigantiNo ratings yet
- Contribution To The Theory Brownian MotionDocument4 pagesContribution To The Theory Brownian MotionVicente SamithNo ratings yet
- Shapley, 31,: Harlow, Age of (1919) - Ibid., 3'einstein, A., Trdgheit Korpers Energienhalt Abhdngig? Physik, (1905)Document4 pagesShapley, 31,: Harlow, Age of (1919) - Ibid., 3'einstein, A., Trdgheit Korpers Energienhalt Abhdngig? Physik, (1905)mihaiNo ratings yet
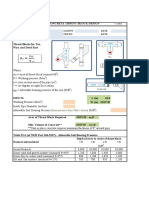
- THRUST BLOCK DESIGNDocument4 pagesTHRUST BLOCK DESIGNcherryNo ratings yet
- Thrust DsDocument4 pagesThrust DscherryNo ratings yet
- Client: County: Date: DSN By: CHK By: Date: Comments:: From Soil Test or From Table 1 BelowDocument1 pageClient: County: Date: DSN By: CHK By: Date: Comments:: From Soil Test or From Table 1 BelowcherryNo ratings yet
- Client: County: Date: DSN By: CHK By: Date: Comments:: From Soil Test or From Table 1 BelowDocument1 pageClient: County: Date: DSN By: CHK By: Date: Comments:: From Soil Test or From Table 1 BelowcherryNo ratings yet
- Unified Approach To Thrust Restraint DesignDocument6 pagesUnified Approach To Thrust Restraint DesigncherryNo ratings yet
- Thrust Block Specifications and DimensionsDocument1 pageThrust Block Specifications and DimensionscherryNo ratings yet
- Clay Cladding ASPECT PresentationDocument73 pagesClay Cladding ASPECT PresentationcherryNo ratings yet
- Operation of The System For Development of Force, Speed and PowerDocument10 pagesOperation of The System For Development of Force, Speed and PowercherryNo ratings yet
- Multiwall polycarbonate sheet provides strength and energy savingsDocument8 pagesMultiwall polycarbonate sheet provides strength and energy savingscherryNo ratings yet
- Fixed End MomentsDocument1 pageFixed End MomentsHarold DeanNo ratings yet
- Bs4 1 Specification For Hot Rolled Sections PDFDocument19 pagesBs4 1 Specification For Hot Rolled Sections PDFdashlucky88No ratings yet
- Gujarat State Petronet LTD Sn10 Eia2Document125 pagesGujarat State Petronet LTD Sn10 Eia2cherryNo ratings yet
- IS 2571 (1970) : Code of Practice For Laying In-Situ Cement Concrete Flooring (D 5 Flooring, Wall Finishing and Roofing)Document30 pagesIS 2571 (1970) : Code of Practice For Laying In-Situ Cement Concrete Flooring (D 5 Flooring, Wall Finishing and Roofing)Prashant MalikNo ratings yet
- Design Loads and Components of Gantry GirdersDocument54 pagesDesign Loads and Components of Gantry GirdersKatherine StuartNo ratings yet
- IS 2571 (1970) : Code of Practice For Laying In-Situ Cement Concrete Flooring (D 5 Flooring, Wall Finishing and Roofing)Document30 pagesIS 2571 (1970) : Code of Practice For Laying In-Situ Cement Concrete Flooring (D 5 Flooring, Wall Finishing and Roofing)Prashant MalikNo ratings yet
- The Cactus and the SnowsDocument22 pagesThe Cactus and the SnowsCrisNo ratings yet
- Catalogo Tecnico Gb-S v07Document29 pagesCatalogo Tecnico Gb-S v07farou9 bmzNo ratings yet
- November 2010 (v1) QP - Paper 3 CIE Biology A-Level PDFDocument12 pagesNovember 2010 (v1) QP - Paper 3 CIE Biology A-Level PDFWiji NingNo ratings yet
- Bathymetry and Its Applications PDFDocument158 pagesBathymetry and Its Applications PDFArseni MaximNo ratings yet
- Capacitores Electroliticos SMDDocument8 pagesCapacitores Electroliticos SMDalvaro marrugoNo ratings yet
- Flange Insulation Sets: Technical SpecificationDocument6 pagesFlange Insulation Sets: Technical SpecificationNor Azlan AwangNo ratings yet
- Manual Bot With Relay CircuitDocument4 pagesManual Bot With Relay CircuitKarishma MishraNo ratings yet
- Accepted Manuscript: Process Safety and Environment ProtectionDocument51 pagesAccepted Manuscript: Process Safety and Environment Protectionimran shaukatNo ratings yet
- Aam April 2023Document198 pagesAam April 2023Adhitya DewantaraNo ratings yet
- Guess The Animal!: ModelDocument2 pagesGuess The Animal!: ModelGiovanni Vilcapoma LauraNo ratings yet
- CH 2.2: Separable Equations: X F DX DyDocument9 pagesCH 2.2: Separable Equations: X F DX DyPFENo ratings yet
- Global Resort List by Country (38 charactersDocument51 pagesGlobal Resort List by Country (38 charactersMaulik ShahNo ratings yet
- Water Spray Nozzle: Fire Fighting Equipment Data SheetDocument7 pagesWater Spray Nozzle: Fire Fighting Equipment Data SheetJosef MadronaNo ratings yet
- Steel Grid StructureDocument2 pagesSteel Grid StructureKusum RawatNo ratings yet
- Phychem Chapter 3 Part 1Document14 pagesPhychem Chapter 3 Part 1Skye DiazNo ratings yet
- 2011 02 Huijben Spie Why Every Urea Plant Needs A Continuous NC Meter PDFDocument9 pages2011 02 Huijben Spie Why Every Urea Plant Needs A Continuous NC Meter PDFfawadintNo ratings yet
- The Following Functional Health Pattern Assessment Is Based On A 65 Year Old Scottish Woman Who Lives Independently With Her Husband in Their Home at Happy ValleyDocument9 pagesThe Following Functional Health Pattern Assessment Is Based On A 65 Year Old Scottish Woman Who Lives Independently With Her Husband in Their Home at Happy ValleyJajangNo ratings yet
- Image Processing Based Leaf Rot Disease, Detection of Betel Vine (Piper Betlel.)Document7 pagesImage Processing Based Leaf Rot Disease, Detection of Betel Vine (Piper Betlel.)ManiNo ratings yet
- Heliflex Hose CatalogueDocument119 pagesHeliflex Hose CatalogueAugustine DharmarajNo ratings yet
- Fitness RX For Women - December 2013Document124 pagesFitness RX For Women - December 2013renrmrm100% (2)
- Alaina W - Food Project ReflectionDocument1 pageAlaina W - Food Project Reflectionapi-438601399No ratings yet
- Mitsubishi Colt 2007 Rear AxleDocument2 pagesMitsubishi Colt 2007 Rear AxlenalokinNo ratings yet
- EKO75 KW VST Air Cooled Electrical DiagramDocument13 pagesEKO75 KW VST Air Cooled Electrical DiagramBerat DeğirmenciNo ratings yet
- Iodine Summaryupdate 2016Document26 pagesIodine Summaryupdate 2016FrankNo ratings yet
- DM3xxx Accessory List LeafletDocument2 pagesDM3xxx Accessory List LeafletAdvantec SrlNo ratings yet
- CFD Answer KeyDocument12 pagesCFD Answer KeyRaahini IzanaNo ratings yet
- CHAPT 12a PDFDocument2 pagesCHAPT 12a PDFindocode100% (1)
- Concept of StateDocument10 pagesConcept of StateAryansh ShuklaNo ratings yet
- Rites of Acceptance For Altar Servers PDFDocument3 pagesRites of Acceptance For Altar Servers PDFJohn Carl Aparicio100% (1)
- Estimating Hb Levels with Sahli's MethodDocument13 pagesEstimating Hb Levels with Sahli's MethodSANANo ratings yet
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 5 out of 5 stars5/5 (5)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 3.5 out of 5 stars3.5/5 (33)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessFrom EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessNo ratings yet
- Wayfinding: The Science and Mystery of How Humans Navigate the WorldFrom EverandWayfinding: The Science and Mystery of How Humans Navigate the WorldRating: 4.5 out of 5 stars4.5/5 (18)
- Fire Season: Field Notes from a Wilderness LookoutFrom EverandFire Season: Field Notes from a Wilderness LookoutRating: 4 out of 5 stars4/5 (142)
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionFrom EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionRating: 4 out of 5 stars4/5 (811)
- The Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorFrom EverandThe Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorRating: 4.5 out of 5 stars4.5/5 (137)
- The Other End of the Leash: Why We Do What We Do Around DogsFrom EverandThe Other End of the Leash: Why We Do What We Do Around DogsRating: 5 out of 5 stars5/5 (63)
- The Mind of Plants: Narratives of Vegetal IntelligenceFrom EverandThe Mind of Plants: Narratives of Vegetal IntelligenceRating: 4.5 out of 5 stars4.5/5 (11)
- The Lives of Bees: The Untold Story of the Honey Bee in the WildFrom EverandThe Lives of Bees: The Untold Story of the Honey Bee in the WildRating: 4.5 out of 5 stars4.5/5 (44)
- Why Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeFrom EverandWhy Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeRating: 4.5 out of 5 stars4.5/5 (699)
- World of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsFrom EverandWorld of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsRating: 4 out of 5 stars4/5 (222)
- When You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsFrom EverandWhen You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsRating: 3.5 out of 5 stars3.5/5 (13)
- The Secret Life of Lobsters: How Fishermen and Scientists Are Unraveling the Mysteries of Our Favorite CrustaceanFrom EverandThe Secret Life of Lobsters: How Fishermen and Scientists Are Unraveling the Mysteries of Our Favorite CrustaceanNo ratings yet
- Spoiled Rotten America: Outrages of Everyday LifeFrom EverandSpoiled Rotten America: Outrages of Everyday LifeRating: 3 out of 5 stars3/5 (19)
- Come Back, Como: Winning the Heart of a Reluctant DogFrom EverandCome Back, Como: Winning the Heart of a Reluctant DogRating: 3.5 out of 5 stars3.5/5 (10)
- Last Child in the Woods: Saving Our Children From Nature-Deficit DisorderFrom EverandLast Child in the Woods: Saving Our Children From Nature-Deficit DisorderRating: 4 out of 5 stars4/5 (283)
- The Hidden Life of Trees: What They Feel, How They CommunicateFrom EverandThe Hidden Life of Trees: What They Feel, How They CommunicateRating: 4 out of 5 stars4/5 (1002)