You might also like
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- drv11873 Yamaha Mio IcDocument24 pagesdrv11873 Yamaha Mio IcJoseph YumulNo ratings yet
- TLV61225 Single-Cell High-Efficient Step-Up Converter in 6-Pin SC-70 PackageDocument21 pagesTLV61225 Single-Cell High-Efficient Step-Up Converter in 6-Pin SC-70 Packagearsi bariyaNo ratings yet
- SN74LVC2G14 Dual Schmitt-Trigger InverterDocument25 pagesSN74LVC2G14 Dual Schmitt-Trigger InverterhogaoftNo ratings yet
- SN 74 LVC 2 G 14Document25 pagesSN 74 LVC 2 G 14parvualexandruNo ratings yet
- DRV8821 Dual Stepper Motor Controller and Driver: 1 Features 3 DescriptionDocument32 pagesDRV8821 Dual Stepper Motor Controller and Driver: 1 Features 3 DescriptionVictor CuevasNo ratings yet
- SN 74 LVC 3 G 17Document27 pagesSN 74 LVC 3 G 17joaica5046No ratings yet
- UCC27324-Q1 Dual 4-A Peak High-Speed Low-Side Power MOSFET DriverDocument25 pagesUCC27324-Q1 Dual 4-A Peak High-Speed Low-Side Power MOSFET DriverMarcel SavioloNo ratings yet
- TS3A5018RSVRDocument37 pagesTS3A5018RSVRThomas GuoNo ratings yet
- SN74LVC125A Quadruple Bus Buffer Gate With 3-State Outputs: 1 Features 3 DescriptionDocument28 pagesSN74LVC125A Quadruple Bus Buffer Gate With 3-State Outputs: 1 Features 3 DescriptionSvv KarthikNo ratings yet
- Tps 53014Document27 pagesTps 53014nebiyu mulugetaNo ratings yet
- lm2576 PDFDocument44 pageslm2576 PDFLeonid MavroskiNo ratings yet
- LM2576xx Series SIMPLE SWITCHER 3-A Step-Down Voltage RegulatorDocument44 pagesLM2576xx Series SIMPLE SWITCHER 3-A Step-Down Voltage Regulator111No ratings yet
- Snx5Lbc184 Differential Transceiver With Transient Voltage SuppressionDocument29 pagesSnx5Lbc184 Differential Transceiver With Transient Voltage SuppressionGabriel EscamillaNo ratings yet
- Drv 8843Document29 pagesDrv 8843brajmohanNo ratings yet
- SN74LVC2G125 Dual Bus Buffer Gate With 3-State Outputs: 1 Features 3 DescriptionDocument27 pagesSN74LVC2G125 Dual Bus Buffer Gate With 3-State Outputs: 1 Features 3 Descriptionviatr0nicNo ratings yet
- sn74lvc2g04 PDFDocument29 pagessn74lvc2g04 PDFEko Dicky PrasetyoNo ratings yet
- UCC21530Document47 pagesUCC21530Silvio QuerzoliNo ratings yet
- LM 2586Document43 pagesLM 2586Cristobal MartinezNo ratings yet
- LM2576xx Series SIMPLE SWITCHER 3-A Step-Down Voltage RegulatorDocument43 pagesLM2576xx Series SIMPLE SWITCHER 3-A Step-Down Voltage RegulatorqwertyNo ratings yet
- sn74lvc1g17 q1Document26 pagessn74lvc1g17 q1Cloud EngineeringNo ratings yet
- Ucc28051 PFCDocument34 pagesUcc28051 PFCluis.moralesNo ratings yet
- SN754410 Quadruple Half-H Driver: 1 Features 3 DescriptionDocument16 pagesSN754410 Quadruple Half-H Driver: 1 Features 3 DescriptionJeanpierre H. AsdikianNo ratings yet
- sn754410Document17 pagessn754410jeanclaudespilmont40550No ratings yet
- LM2594MXDocument44 pagesLM2594MXtecnicogato27No ratings yet
- LM2576xx Series SIMPLE SWITCHER 3-A Step-Down Voltage RegulatorDocument43 pagesLM2576xx Series SIMPLE SWITCHER 3-A Step-Down Voltage RegulatorAntonio ChiarelliNo ratings yet
- LM 2576Document43 pagesLM 2576Hồ Minh HớiNo ratings yet
- lm53625 q1 PDFDocument56 pageslm53625 q1 PDFPrabhansh PandeyNo ratings yet
- SN74LVC1G34 Single Buffer Gate: 1 Features 3 DescriptionDocument47 pagesSN74LVC1G34 Single Buffer Gate: 1 Features 3 Descriptionlogiciel en ligneNo ratings yet
- SN 74 CBTLV 3257Document31 pagesSN 74 CBTLV 3257sas999333No ratings yet
- Lm2593Hv Simple Switcher Power Converter 150-Khz, 2-A Step-Down Voltage RegulatorDocument31 pagesLm2593Hv Simple Switcher Power Converter 150-Khz, 2-A Step-Down Voltage RegulatorPrasad ChabbiNo ratings yet
- Lm2593Hv Simple Switcher Power Converter 150-Khz, 2-A Step-Down Voltage RegulatorDocument32 pagesLm2593Hv Simple Switcher Power Converter 150-Khz, 2-A Step-Down Voltage Regulatorgowrav_hassanNo ratings yet
- TPS54327 3-A Output Single Synchronous Step-Down Switcher With Integrated FETDocument28 pagesTPS54327 3-A Output Single Synchronous Step-Down Switcher With Integrated FETGuillermo González CastilloNo ratings yet
- TXS0102 2-Bit Bidirectional Voltage-Level Translator For Open-Drain and Push-Pull ApplicationsDocument47 pagesTXS0102 2-Bit Bidirectional Voltage-Level Translator For Open-Drain and Push-Pull Applicationskarthik4096No ratings yet
- LM2587 4-V To 40-V, 5-A Step-Up Wide V Flyback Regulator: IN 1 Features 3 DescriptionDocument39 pagesLM2587 4-V To 40-V, 5-A Step-Up Wide V Flyback Regulator: IN 1 Features 3 DescriptionBINIYAM BERHENo ratings yet
- SN 74 LVC 1 G 19Document33 pagesSN 74 LVC 1 G 19SyamsidarNo ratings yet
- SN74LVC1G17 Single Schmitt-Trigger Buffer: 1 Features 3 DescriptionDocument48 pagesSN74LVC1G17 Single Schmitt-Trigger Buffer: 1 Features 3 DescriptioncicNo ratings yet
- DRV 5013Document36 pagesDRV 5013vishwas gaurNo ratings yet
- DRV5013 Digital-Latch Hall Effect SensorDocument36 pagesDRV5013 Digital-Latch Hall Effect SensorEcus ElectronicsNo ratings yet
- DRV8303Document37 pagesDRV8303Lu HoaNo ratings yet
- Lm2594, Lm2594Hv Simple Switcher Power Converter 150-Khz 0.5-A Step-Down Voltage RegulatorDocument41 pagesLm2594, Lm2594Hv Simple Switcher Power Converter 150-Khz 0.5-A Step-Down Voltage RegulatorErasmo Franco SNo ratings yet
- Lm2674 Simple Switcher Power Converter High Efficiency 500-Ma Step-Down Voltage RegulatorDocument35 pagesLm2674 Simple Switcher Power Converter High Efficiency 500-Ma Step-Down Voltage RegulatorTécnico 04 LógicaNo ratings yet
- LM 2588Document40 pagesLM 25888403c36589584aNo ratings yet
- TL5209Document25 pagesTL5209dinhdtdNo ratings yet
- A78xx Fixed Positive Voltage Regulators: 1 Features 3 DescriptionDocument27 pagesA78xx Fixed Positive Voltage Regulators: 1 Features 3 DescriptionGeraldo Aparecido SantosNo ratings yet
- lm2574 PDFDocument39 pageslm2574 PDFDrteslaNo ratings yet
- LM2574x SIMPLE SWITCHER® 0.5-A Step-Down Voltage Regulator: 1 Features 3 DescriptionDocument38 pagesLM2574x SIMPLE SWITCHER® 0.5-A Step-Down Voltage Regulator: 1 Features 3 DescriptionluizNo ratings yet
- Adc 0804 Data SheetDocument58 pagesAdc 0804 Data SheetOmar Chavez MontesNo ratings yet
- SN 74 LVC 1 G 32Document34 pagesSN 74 LVC 1 G 32Sebastian QuaroneNo ratings yet
- TS5A63157 12 - SPDT Analog Switch 5-V/3.3-V Single-Channel 2:1 Multiplexer/demultiplexerDocument34 pagesTS5A63157 12 - SPDT Analog Switch 5-V/3.3-V Single-Channel 2:1 Multiplexer/demultiplexerCarlos ArévaloNo ratings yet
- Snx4Lvc541A Octal Buffers/Drivers With 3-State Outputs: 1 Features 2 ApplicationsDocument36 pagesSnx4Lvc541A Octal Buffers/Drivers With 3-State Outputs: 1 Features 2 ApplicationsSugeng HariadiNo ratings yet
- Lm2733 0.6 and 1.6-Mhz Boost Converters With 40-V Internal Fet Switch in Sot-23Document26 pagesLm2733 0.6 and 1.6-Mhz Boost Converters With 40-V Internal Fet Switch in Sot-23magicecstaticNo ratings yet
- tpl0501 100Document31 pagestpl0501 100DaniesSetiawanNo ratings yet
- LM 555Document25 pagesLM 555api-276948567No ratings yet
- lm555 PDFDocument25 pageslm555 PDFAndes PutraNo ratings yet
- LM555 Timer: 1 Features 3 DescriptionDocument25 pagesLM555 Timer: 1 Features 3 DescriptionAugusto PolveriniNo ratings yet
- lm555 PDFDocument25 pageslm555 PDFrenatoNo ratings yet
- lm555 PDFDocument27 pageslm555 PDFsurinder singhNo ratings yet
- Trapezoidal Back EMF BLDC Motor Control TechniquesDocument4 pagesTrapezoidal Back EMF BLDC Motor Control TechniquesSitt Nyein SoeNo ratings yet
- Asynchronous Communications With The Picmicro UsartDocument28 pagesAsynchronous Communications With The Picmicro UsartBrankoObradovicNo ratings yet
- Tidudf 9Document24 pagesTidudf 9Sitt Nyein SoeNo ratings yet
- High-Side MOSFET Driver: Features General DescriptionDocument20 pagesHigh-Side MOSFET Driver: Features General DescriptionSitt Nyein SoeNo ratings yet
- L298N Motor DriverDocument7 pagesL298N Motor DrivercerenautaNo ratings yet
- CPE 0907334 Embeddedlab Sep 2016 FallDocument127 pagesCPE 0907334 Embeddedlab Sep 2016 FallSitt Nyein Soe100% (1)
- PWM Proportional DriverDocument7 pagesPWM Proportional DriverSitt Nyein SoeNo ratings yet
- PIC16F628ADocument178 pagesPIC16F628AEmanuele100% (1)
- MplabDocument1 pageMplabSitt Nyein SoeNo ratings yet
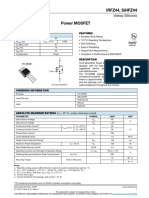
- Irfz44, Sihfz44: Vishay SiliconixDocument9 pagesIrfz44, Sihfz44: Vishay SiliconixSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- CTP Complete Line Of: Remanufactured EnginesDocument1 pageCTP Complete Line Of: Remanufactured EnginesSitt Nyein SoeNo ratings yet
- DRV 104Document26 pagesDRV 104Sitt Nyein SoeNo ratings yet
- DRV 104Document26 pagesDRV 104Sitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Bobcat 325 ServiceDocument137 pagesBobcat 325 ServiceBorsos István88% (8)
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- Scribd For Free Download PleaseDocument1 pageScribd For Free Download PleaseSitt Nyein SoeNo ratings yet
- 1N60 DecDocument2 pages1N60 Decdavid johnNo ratings yet
- Experiment 3 ECADDocument11 pagesExperiment 3 ECADAlvin TacordaNo ratings yet
- 1 - Ficha Técnica Electrobarra LS-IXDocument42 pages1 - Ficha Técnica Electrobarra LS-IXjuan david lopezNo ratings yet
- Data Sheet: Genset Controller, GC-1FDocument20 pagesData Sheet: Genset Controller, GC-1FoscarafonsoNo ratings yet
- Electrical Equipment: LightingDocument31 pagesElectrical Equipment: LightinglimadacarlosNo ratings yet
- Physics Investigatory ProjectDocument12 pagesPhysics Investigatory ProjectambrishNo ratings yet
- FSDM0565R: Green Mode Fairchild Power Switch (FPS)Document20 pagesFSDM0565R: Green Mode Fairchild Power Switch (FPS)Najam Ul HassanNo ratings yet
- PD Instrument SDMT - PD13 Rev ADocument2 pagesPD Instrument SDMT - PD13 Rev Albk50No ratings yet
- Manual PROFIBUS Repeater OZD Profi 12MDocument40 pagesManual PROFIBUS Repeater OZD Profi 12MpatrickNo ratings yet
- 23pu200 SeriesDocument32 pages23pu200 SeriesKsatria PratamaNo ratings yet
- Generalized State Space AveragingDocument12 pagesGeneralized State Space AveragingArsalan AtharNo ratings yet
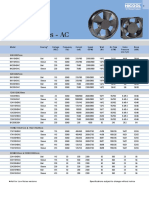
- Compact Fan Ac PDFDocument1 pageCompact Fan Ac PDFKanaga RajNo ratings yet
- EDS 01-0045 Overhead Line Ratings PDFDocument12 pagesEDS 01-0045 Overhead Line Ratings PDFDan StreetNo ratings yet
- Time Varying SignalsDocument17 pagesTime Varying SignalsDiego Cancino SilvaNo ratings yet
- Anern Hybrid Solar Inverter (EVO Series) Specification & Price List-202304Document2 pagesAnern Hybrid Solar Inverter (EVO Series) Specification & Price List-202304Bhs GroupNo ratings yet
- Chapter 3Document7 pagesChapter 3Viplav SachanNo ratings yet
- Microwave Amlifier Design Azrar PDFDocument48 pagesMicrowave Amlifier Design Azrar PDFZakaria MounirNo ratings yet
- GCS 0300-Earthing (200808)Document28 pagesGCS 0300-Earthing (200808)Mussa ElbarraniNo ratings yet
- Single Phase Controlled RectifierDocument49 pagesSingle Phase Controlled RectifierTuhin ShahNo ratings yet
- E Advanced Service Functional Blocks C-Arm C-ArmDocument78 pagesE Advanced Service Functional Blocks C-Arm C-ArmNirav Barot100% (3)
- ABB ACS800 37 Manual PDFDocument250 pagesABB ACS800 37 Manual PDFAnonymous 6IqOdxNo ratings yet
- HS25 Incremental EncoderDocument4 pagesHS25 Incremental Encoderoswaldo58No ratings yet
- PLDT Circuit Job Hazard AnalysisDocument2 pagesPLDT Circuit Job Hazard AnalysisDarwin AlvarezNo ratings yet
- TC8129CKWDocument17 pagesTC8129CKWVukica Ivic100% (1)
- Kathmandu UniversityDocument4 pagesKathmandu UniversitySagar ChaulagaiNo ratings yet
- RX25GV1NB RX35GV1NB FTX25GV1NB FTX35GV1NB PDFDocument174 pagesRX25GV1NB RX35GV1NB FTX25GV1NB FTX35GV1NB PDFMalay K GhoshNo ratings yet
- Instruction Manual of 3 Phase Induction MotorDocument25 pagesInstruction Manual of 3 Phase Induction MotorAruljyothy PCNo ratings yet
- 2012 Manual Tec Nico Power WizardDocument49 pages2012 Manual Tec Nico Power WizardЕвгений_Егоров94% (17)
- EDEXCEL CORE PRAC EMF & Internal Resistance WorksheetDocument5 pagesEDEXCEL CORE PRAC EMF & Internal Resistance WorksheetDiyaNo ratings yet
- Contactor D - LC1D50AM7Document4 pagesContactor D - LC1D50AM7KUKU KUNo ratings yet