You might also like
- Tpcs Report (1) - 1Document18 pagesTpcs Report (1) - 1saurabh konjeNo ratings yet
- 3 - Automatic Wall Painting Machine PDFDocument41 pages3 - Automatic Wall Painting Machine PDFaalekhNo ratings yet
- Intelligent Motorized Wall Painting CraneDocument11 pagesIntelligent Motorized Wall Painting Cranesivarushi0% (1)
- DATA-Sheet Format - 250KW - 4POLE - 3.3KV - R02Document246 pagesDATA-Sheet Format - 250KW - 4POLE - 3.3KV - R02Subhajit BasakNo ratings yet
- Basic Guides: Electric Substation DesignDocument98 pagesBasic Guides: Electric Substation DesignMuruganNo ratings yet
- General PDFDocument304 pagesGeneral PDFAnirudh Joshi100% (1)
- Final Thesis1Document57 pagesFinal Thesis1Ruchita LanjewarNo ratings yet
- Science Investigatory Project Sample RoboticsDocument8 pagesScience Investigatory Project Sample RoboticsjELI BIEns100% (1)
- Review On Fabrication of 3 Axis Spray Painting Machine Ijariie1981Document4 pagesReview On Fabrication of 3 Axis Spray Painting Machine Ijariie1981Anonymous Clyy9NNo ratings yet
- DESIGN - AND - FABRICATION - OF - AUTOMATIC - SPRAY - PAINTING - MACHINE - Ijariie7676 PDFDocument7 pagesDESIGN - AND - FABRICATION - OF - AUTOMATIC - SPRAY - PAINTING - MACHINE - Ijariie7676 PDFHussain MuslimNo ratings yet
- DESIGN - AND - FABRICATION - OF - AUTOMATIC - SPRAY - PAINTING - MACHINE - Ijariie7676 PDFDocument7 pagesDESIGN - AND - FABRICATION - OF - AUTOMATIC - SPRAY - PAINTING - MACHINE - Ijariie7676 PDFHussain MuslimNo ratings yet
- Developmentofrobotforautomaticwallpaintingwritingdrawingandcrackdetection 1459241674Document5 pagesDevelopmentofrobotforautomaticwallpaintingwritingdrawingandcrackdetection 1459241674gokul outlanderNo ratings yet
- Remote Operated Wall Painting Machine 1 2 3 4: 1. AbstractDocument3 pagesRemote Operated Wall Painting Machine 1 2 3 4: 1. Abstractankush belkarNo ratings yet
- Automatic Wall Painting Robot JournalDocument2 pagesAutomatic Wall Painting Robot JournalAnonymous xhi01squNo ratings yet
- Design and Implementation of Automatic Painting Mobile RobotDocument7 pagesDesign and Implementation of Automatic Painting Mobile RobotIAES International Journal of Robotics and AutomationNo ratings yet
- Design and Fabrication of Interior Wall Painting MachineDocument4 pagesDesign and Fabrication of Interior Wall Painting MachineAbhishekNo ratings yet
- Design of An Autonomous Wall Painting Ro PDFDocument6 pagesDesign of An Autonomous Wall Painting Ro PDFHussain MuslimNo ratings yet
- Fabrication of Wall Painting RobotDocument3 pagesFabrication of Wall Painting RobotOmkarNo ratings yet
- Smart Wall Painting System: Mr.P.V.Prasad Reddy N.Vijaya Rami Reddy Dr. S Madhava ReddyDocument6 pagesSmart Wall Painting System: Mr.P.V.Prasad Reddy N.Vijaya Rami Reddy Dr. S Madhava ReddyEditor IJRITCCNo ratings yet
- Spray Painting Robot - Stage1 - ReportDocument71 pagesSpray Painting Robot - Stage1 - ReportwasundesagarNo ratings yet
- Modelling and Fabrication of Automatic Wall Plastering MachineDocument11 pagesModelling and Fabrication of Automatic Wall Plastering MachineyonasNo ratings yet
- Spray Painting Robot With Low Cost AutomDocument9 pagesSpray Painting Robot With Low Cost AutomMuhammad SulemanNo ratings yet
- " Design of Spray Paint Robot" Team M02: A Capstone Project Report OnDocument28 pages" Design of Spray Paint Robot" Team M02: A Capstone Project Report OnS JNo ratings yet
- Robotics in Construction IndustryDocument8 pagesRobotics in Construction IndustryAryadie Armien TseNo ratings yet
- Automatic Wall Painting RobotDocument3 pagesAutomatic Wall Painting RobotInternational Journal of Innovative Science and Research Technology0% (1)
- Project IdeaDocument11 pagesProject IdeaSagni TamiruNo ratings yet
- Designofautomaticwallplasteringmachine Journal PDFDocument14 pagesDesignofautomaticwallplasteringmachine Journal PDFDave Robert HasibuanNo ratings yet
- Wall RobotDocument6 pagesWall RobotVignesh KNo ratings yet
- Automatic Wall Plastering and Repairing Robot Using Artificial IntelligenceDocument4 pagesAutomatic Wall Plastering and Repairing Robot Using Artificial IntelligenceEditor IJRITCC100% (1)
- Accutile For EvaluatorsDocument5 pagesAccutile For EvaluatorsGeoffrey KaraaNo ratings yet
- Design and Fabrication of High Velocity Impact Plaster MachineDocument12 pagesDesign and Fabrication of High Velocity Impact Plaster MachineTJPRC PublicationsNo ratings yet
- New Product DevelopmentDocument19 pagesNew Product DevelopmentFirdaus AbdullahNo ratings yet
- Development of Wall Painting RobotDocument5 pagesDevelopment of Wall Painting RobotPrakash Kumar SenNo ratings yet
- Automated Exterior Wall Painting Robot Using Raspberry PiDocument9 pagesAutomated Exterior Wall Painting Robot Using Raspberry PiHithesh GowdaNo ratings yet
- Development of The Can Crusher Machine (Chapter 1)Document3 pagesDevelopment of The Can Crusher Machine (Chapter 1)TTNo ratings yet
- Robotics in Construction IndustryDocument6 pagesRobotics in Construction IndustryJohn Gabriel A. MañozaNo ratings yet
- Automatic Wall Painting MachineDocument9 pagesAutomatic Wall Painting MachineaalekhNo ratings yet
- Automatic Wall Painting MachineDocument9 pagesAutomatic Wall Painting MachineaalekhNo ratings yet
- Please Note: The Matter Produced Below Is Reference Material Only For Preparing The Project Report. It Is Not The Complete Project ReportDocument45 pagesPlease Note: The Matter Produced Below Is Reference Material Only For Preparing The Project Report. It Is Not The Complete Project ReportGera Happy paulNo ratings yet
- Automatic Blackboard CleanerDocument4 pagesAutomatic Blackboard Cleanerharmanhoney_singh100% (1)
- Cpe ProjectDocument16 pagesCpe ProjectBhushanDabholkarNo ratings yet
- Design and Development of SemiDocument5 pagesDesign and Development of SemiLokesh JanaNo ratings yet
- Design & Development of Automated Spray PaintingDocument22 pagesDesign & Development of Automated Spray PaintingPran29No ratings yet
- Mechanical Engineer CDR Report SampleDocument34 pagesMechanical Engineer CDR Report Sampleanusha akurathiNo ratings yet
- Pneumatically Operated Automatic Spray Painting Robot: © February 2018 - IJIRT - Volume 4 Issue 9 - ISSN: 2349-6002Document4 pagesPneumatically Operated Automatic Spray Painting Robot: © February 2018 - IJIRT - Volume 4 Issue 9 - ISSN: 2349-6002Shanker PandeyNo ratings yet
- Plaster Is A BuchiDocument9 pagesPlaster Is A BuchiListlessNo ratings yet
- Copyof3 3 1 Report Template Pltw-MarblesorterDocument11 pagesCopyof3 3 1 Report Template Pltw-Marblesorterapi-268550278No ratings yet
- Design of Automatic Wall Plastering MachineDocument13 pagesDesign of Automatic Wall Plastering Machinelaukik_rautNo ratings yet
- REMF-111 Self-Directing Pneumatic Spray-Painting RobotDocument3 pagesREMF-111 Self-Directing Pneumatic Spray-Painting RobotretechNo ratings yet
- Salutillo and Mondejar ThesisDocument43 pagesSalutillo and Mondejar ThesisJoshua Ocariza Dingding100% (1)
- Electromagnetic Tool Changer For ABB IRB1200 by Chandrashekhar ChudmungeDocument5 pagesElectromagnetic Tool Changer For ABB IRB1200 by Chandrashekhar ChudmungeChandrashekhar ChudmungeNo ratings yet
- Semi-Automated Roller Painting Machine-IJRASETDocument4 pagesSemi-Automated Roller Painting Machine-IJRASETIJRASETPublicationsNo ratings yet
- Research PaperDocument5 pagesResearch PaperAtul Chauhan80% (5)
- Automatic Defect Detection and Classification Technique From Image ProcessingDocument6 pagesAutomatic Defect Detection and Classification Technique From Image ProcessingEditor IJRITCCNo ratings yet
- Eac MayuriDocument23 pagesEac Mayuriakshayawari758No ratings yet
- Recycle Bin Tin CrusherDocument39 pagesRecycle Bin Tin CrusherggombekNo ratings yet
- MikiasDocument32 pagesMikiasMikî MańNo ratings yet
- Wall PaintingDocument8 pagesWall PaintingVigneshwaran SrinivasanNo ratings yet
- Contour Crafting: A Step Towards Rapid ConstructionDocument2 pagesContour Crafting: A Step Towards Rapid ConstructionAkhil Nath P SNo ratings yet
- Engineering Drawing from First Principles: Using AutoCADFrom EverandEngineering Drawing from First Principles: Using AutoCADRating: 4.5 out of 5 stars4.5/5 (8)
- CW-3000 Industrial Chiller User ManualDocument12 pagesCW-3000 Industrial Chiller User ManualPARTHIBAN RETECHNo ratings yet
- SQL Contadores de PerformanceDocument7 pagesSQL Contadores de Performancejemfo761No ratings yet
- MGE Motors: Installation and Operating InstructionsDocument76 pagesMGE Motors: Installation and Operating InstructionsJocelito MaiaNo ratings yet
- PCB MakingDocument3 pagesPCB MakingAngelica Mae BanaagNo ratings yet
- High Quality Audiophile Operational Amplifier/Driver RT6863: RicoreDocument8 pagesHigh Quality Audiophile Operational Amplifier/Driver RT6863: Ricoreraoultrifan7560No ratings yet
- R5310203 Power Systems - IIDocument2 pagesR5310203 Power Systems - IIsivabharathamurthyNo ratings yet
- Build An Arduino-LabVIEW Analog Voltmeter - ProjectsDocument7 pagesBuild An Arduino-LabVIEW Analog Voltmeter - ProjectsMelinia HdyNo ratings yet
- Avanti Fridge Instructions Manual (Model FF993W)Document20 pagesAvanti Fridge Instructions Manual (Model FF993W)oxotnicNo ratings yet
- Load Cells Ideas and TipsDocument15 pagesLoad Cells Ideas and Tipsestebanshadow1No ratings yet
- CMOS Three Axis Hall Sensor and Joystick Application Schott3axisJoystickDocument4 pagesCMOS Three Axis Hall Sensor and Joystick Application Schott3axisJoystickbesttv046936No ratings yet
- Contact Details in UaeDocument2 pagesContact Details in Uaejackiee_262000No ratings yet
- SER90E1Document192 pagesSER90E1ElputoAmo XDNo ratings yet
- Umfluxus G6v4-2en 1 1Document244 pagesUmfluxus G6v4-2en 1 1Ali HadiNo ratings yet
- Computer Technician Resume Example: Professional SummaryDocument3 pagesComputer Technician Resume Example: Professional SummaryJean Fritznel PétionNo ratings yet
- VTX A8 Specsheet - 5108391-00CDocument3 pagesVTX A8 Specsheet - 5108391-00CIvan UzunovNo ratings yet
- Digital Systems III 2018 by Onke NkqwiliDocument143 pagesDigital Systems III 2018 by Onke NkqwiliOnke Avr-dude Nkqwili100% (1)
- Physics of Ferroelectrics: Pblittlewood January 27, 2002Document26 pagesPhysics of Ferroelectrics: Pblittlewood January 27, 2002Muhammd Usman MalikNo ratings yet
- Experiment 8: FM DemodulatorDocument20 pagesExperiment 8: FM Demodulatorslay17No ratings yet
- Manual Asus M4a77td Pro - QSGDocument38 pagesManual Asus M4a77td Pro - QSGYomoy ChongNo ratings yet
- Physics Sample Papers 2022-23 QPDocument42 pagesPhysics Sample Papers 2022-23 QPOJASisLiveNo ratings yet
- MD 280Document229 pagesMD 280nhu@nhuNo ratings yet
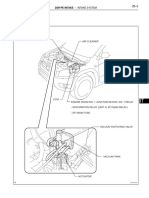
- Intake System: Parts LocationDocument7 pagesIntake System: Parts LocationMenzie Peter RefolNo ratings yet
- PGT316 Lecture 6Document111 pagesPGT316 Lecture 6mid_cycloneNo ratings yet
- KBL 7000 Circuit DiagramDocument15 pagesKBL 7000 Circuit DiagramPaulmanke0% (1)
- Data Sheet - iSH Servo Drive SystemDocument34 pagesData Sheet - iSH Servo Drive Systemm.etNo ratings yet
- Cheetah Log FileDocument231 pagesCheetah Log FileyosangyuNo ratings yet
- DC ServoDocument17 pagesDC ServoMuhammad Iqbal ZahidNo ratings yet