You might also like
- Solar Based Garbage Cleaning BoatDocument4 pagesSolar Based Garbage Cleaning BoatPoonam KilaniyaNo ratings yet
- Fabrication of Plant Irrigation Water SprinklerDocument10 pagesFabrication of Plant Irrigation Water SprinklerSanjayNo ratings yet
- Face Mask DetectionDocument44 pagesFace Mask DetectionRasool ReddyNo ratings yet
- Automatic Railway Track Crack DetectionDocument16 pagesAutomatic Railway Track Crack Detectionmrsugar18No ratings yet
- Design, Fabrication AND Analysis OF Rocker Bogie Mechanism: Mukt Shabd Journal ISSN NO: 2347-3150Document15 pagesDesign, Fabrication AND Analysis OF Rocker Bogie Mechanism: Mukt Shabd Journal ISSN NO: 2347-3150Tejas PrakashNo ratings yet
- Iot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaDocument17 pagesIot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaakashlogicNo ratings yet
- Design & Analysis of Camshaft: S.G.Thorat, Nitesh Dubey, Arvind Shinde, Pushkar Fulpagare, Manish SuryavanshiDocument5 pagesDesign & Analysis of Camshaft: S.G.Thorat, Nitesh Dubey, Arvind Shinde, Pushkar Fulpagare, Manish SuryavanshibebiNo ratings yet
- IoT Based Hydroponic Monitoring SystemDocument9 pagesIoT Based Hydroponic Monitoring SystemUrmatan MarvinNo ratings yet
- Wireless Power Transfer For Electric Vehicle: University of Padova, ItalyDocument142 pagesWireless Power Transfer For Electric Vehicle: University of Padova, ItalyVenkat GoudNo ratings yet
- PIR NoteDocument46 pagesPIR NotenmyusufNo ratings yet
- Accident Prevention Road Safety Modal With Speed Breaker Power GeneratorDocument13 pagesAccident Prevention Road Safety Modal With Speed Breaker Power GeneratorRudrani WalekarNo ratings yet
- Aircraft Hybrid Electric Aircraft MotorsDocument5 pagesAircraft Hybrid Electric Aircraft MotorsAdis Har-yo CahyonoNo ratings yet
- On "GSM BASED E-NOTICE BOARD"Document28 pagesOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Report of IoT Based Power Theft Detection System (01 Suit)Document49 pagesReport of IoT Based Power Theft Detection System (01 Suit)sumit.copy12No ratings yet
- 1.solar Wireless Electric Vehicle Charging SystemDocument38 pages1.solar Wireless Electric Vehicle Charging SystemDinesh KumarNo ratings yet
- Final Year Project SynopsisDocument5 pagesFinal Year Project SynopsisAshok KumarNo ratings yet
- 102 Laser Engraving MachineDocument15 pages102 Laser Engraving MachineChaitanya ghewareNo ratings yet
- Research Paper On AgribotDocument5 pagesResearch Paper On AgribotAnshul AgarwalNo ratings yet
- Acs PDFDocument2 pagesAcs PDFAkshay PowarNo ratings yet
- Microcontroller Based Radar SystemDocument19 pagesMicrocontroller Based Radar SystemMeet MakwanaNo ratings yet
- Pce Mini Project Report: "RF Transmitter and Receiver"Document9 pagesPce Mini Project Report: "RF Transmitter and Receiver"sumit sanchetiNo ratings yet
- Automatic Traffic Light Control System Using Image Processing in EthiopiaDocument1 pageAutomatic Traffic Light Control System Using Image Processing in EthiopiaShubham LandeNo ratings yet
- Final DocDocument128 pagesFinal DocMourya MandavaNo ratings yet
- Title in Caps (Font Size 16) : Visvesvaraya Technological University, BelagaviDocument11 pagesTitle in Caps (Font Size 16) : Visvesvaraya Technological University, Belagavidarshan kuppaswamyNo ratings yet
- 80-Watt Piezoelectric Crosswalk Energy Harvesting System: Technological Institute of The Philippines Manila CampusDocument22 pages80-Watt Piezoelectric Crosswalk Energy Harvesting System: Technological Institute of The Philippines Manila CampusJan Vher ampeloquioNo ratings yet
- Pavi ppt-1Document21 pagesPavi ppt-1Priya KabirNo ratings yet
- ACC FinalDocument18 pagesACC FinalRaj SomaiyaNo ratings yet
- Visvesvaraya Technological University, Belgaum: Technical Seminar Report OnDocument18 pagesVisvesvaraya Technological University, Belgaum: Technical Seminar Report OnShyam RajNo ratings yet
- Smart Helmet For Bike Rider Safety Final PPT Copy 2Document15 pagesSmart Helmet For Bike Rider Safety Final PPT Copy 2Ashish PandeyNo ratings yet
- Guru, Inter Vehicle CommunicationDocument2 pagesGuru, Inter Vehicle Communicationnaveengoyal66No ratings yet
- Automatic Street Light and Power Generation: Bachelor of Science (Information Technology)Document36 pagesAutomatic Street Light and Power Generation: Bachelor of Science (Information Technology)vivekNo ratings yet
- Mini Project Report: A Dissertation Submitted in Partial Fulfilment of The Requirements For The Award of Degree ofDocument38 pagesMini Project Report: A Dissertation Submitted in Partial Fulfilment of The Requirements For The Award of Degree ofS R I K A N T HNo ratings yet
- Project Title: Wildlife Observation RobotDocument13 pagesProject Title: Wildlife Observation RobotVishal LabdeNo ratings yet
- Artificial Intelligence Based Farmer Assistant ChatbotDocument4 pagesArtificial Intelligence Based Farmer Assistant Chatbotkali linuxNo ratings yet
- Literature Survey On Variable Frequency Drive: Anuradha Tomar Devesh SinghDocument8 pagesLiterature Survey On Variable Frequency Drive: Anuradha Tomar Devesh SinghAjay DSElectrical100% (1)
- PCB Drilling MachineDocument15 pagesPCB Drilling MachinelalitlakshyNo ratings yet
- Voice Controled Robot - Sonali NahakDocument30 pagesVoice Controled Robot - Sonali Nahaksriku519No ratings yet
- Tree Climber PDFDocument42 pagesTree Climber PDFJeevan Landge PatilNo ratings yet
- Smart Notice BoardDocument42 pagesSmart Notice BoardDhiraj BhattNo ratings yet
- Design and Implementation of An Advanced Security System For Farm Protection From Wild AnimalsDocument5 pagesDesign and Implementation of An Advanced Security System For Farm Protection From Wild AnimalsGRD JournalsNo ratings yet
- Intelligent Traffic Control System For Smart AmbulanceDocument16 pagesIntelligent Traffic Control System For Smart AmbulanceShivendu PandeyNo ratings yet
- Automatic Toll CollectionDocument27 pagesAutomatic Toll CollectionRakibul HassanNo ratings yet
- EE PowerElectronicsAndPowerSystemsDocument88 pagesEE PowerElectronicsAndPowerSystemsBenitta MaryNo ratings yet
- An Industry Oriented Mini Project Report: "Authentication by Face Recognition Using Open-Cv Python"Document40 pagesAn Industry Oriented Mini Project Report: "Authentication by Face Recognition Using Open-Cv Python"nick furiasNo ratings yet
- Underwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureDocument19 pagesUnderwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureSudarshan RautNo ratings yet
- MSI CEP Lab Project Report Final Version Report...Document23 pagesMSI CEP Lab Project Report Final Version Report...ghazi abbasNo ratings yet
- Technical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed SensorsDocument3 pagesTechnical Specifications:: Over Speed & Unauthorized Vehicle Detection Using Ir Based Speed Sensorshamed razaNo ratings yet
- Adaptive Lighting For AutomobileDocument18 pagesAdaptive Lighting For Automobilekavitha mNo ratings yet
- Image Steganography Using Deep Learning TechniquesDocument62 pagesImage Steganography Using Deep Learning TechniquesabcNo ratings yet
- Design and Implementation of An Intelligent Animal Intrusion Detection SystemDocument17 pagesDesign and Implementation of An Intelligent Animal Intrusion Detection SystemYash ChNo ratings yet
- Alarm System For Medicine Reminder Based On MicrocontrollerDocument4 pagesAlarm System For Medicine Reminder Based On MicrocontrollerEditor IJTSRD100% (1)
- Seminar Report On The Bionic HandDocument26 pagesSeminar Report On The Bionic HandNishanth B KNo ratings yet
- Dokumen - Tips Density Based Traffic Signal System Using MicrocontrollerDocument30 pagesDokumen - Tips Density Based Traffic Signal System Using Microcontroller01fe20bcs181No ratings yet
- Women Safety Night Patrolling RobotDocument8 pagesWomen Safety Night Patrolling RobotIJRASETPublicationsNo ratings yet
- Multipurpose Agricultural EquipmentDocument8 pagesMultipurpose Agricultural EquipmentManiranjan KumarNo ratings yet
- Modeling of An Electric Vehicle With MATLAB/Simulink: January 2019Document8 pagesModeling of An Electric Vehicle With MATLAB/Simulink: January 2019Rhyno WrittersNo ratings yet
- Reverse Engineering of A Spur Gear: A Minor Project ReportDocument31 pagesReverse Engineering of A Spur Gear: A Minor Project ReportRAMACHANDRA DASNo ratings yet
- AbstractDocument28 pagesAbstractKetan MeshramNo ratings yet
- Vinayak Birajdar 8320Document42 pagesVinayak Birajdar 8320subhabirajdarNo ratings yet
- Design and Operation of Human Locomotion SystemsFrom EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNo ratings yet
- Byju'S A Minor Project Report Revaram Malee MBA Under The Guidance of Prof. Rajesh Gupta (Assistant Professor in MBA)Document6 pagesByju'S A Minor Project Report Revaram Malee MBA Under The Guidance of Prof. Rajesh Gupta (Assistant Professor in MBA)saurabh rajakNo ratings yet
- Byju'S A Minor Project Report Revaram Malee MBA Under The Guidance of Prof. Rajesh Gupta (Assistant Professor in MBA)Document60 pagesByju'S A Minor Project Report Revaram Malee MBA Under The Guidance of Prof. Rajesh Gupta (Assistant Professor in MBA)saurabh rajakNo ratings yet
- Analyzing The Hyperlocal Delivery Business Model Using Operations Research TechniquesDocument6 pagesAnalyzing The Hyperlocal Delivery Business Model Using Operations Research Techniquessaurabh rajakNo ratings yet
- Happiness GroupDocument15 pagesHappiness Groupsaurabh rajakNo ratings yet
- BYJU1Document61 pagesBYJU1saurabh rajakNo ratings yet
- Entrepreneurship Presentation of RevaDocument11 pagesEntrepreneurship Presentation of Revasaurabh rajakNo ratings yet
- Byju'S A Minor Project Report Revaram Malee MBA Under The Guidance of Prof. Rajesh Gupta (Assistant Professor in MBA)Document8 pagesByju'S A Minor Project Report Revaram Malee MBA Under The Guidance of Prof. Rajesh Gupta (Assistant Professor in MBA)saurabh rajakNo ratings yet
- Topic 4 Differential Pressure and Flow Sensors (Bernoulli Principle Venturi Effect)Document8 pagesTopic 4 Differential Pressure and Flow Sensors (Bernoulli Principle Venturi Effect)Vefa MustafazadeNo ratings yet
- Topological InsulatorsDocument9 pagesTopological InsulatorsRiturajNo ratings yet
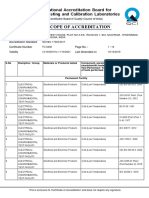
- Laboratory NameDocument16 pagesLaboratory Namegopinadh57No ratings yet
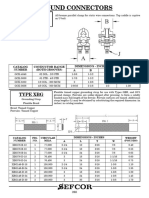
- 289 Sefcor XBGDocument1 page289 Sefcor XBGalejandro SoteloNo ratings yet
- Section-I (Single Answer Correct Type)Document6 pagesSection-I (Single Answer Correct Type)pankaj agarwalNo ratings yet
- Cambridge International AS and A Level Physics (9702) : Practical Booklet 4Document10 pagesCambridge International AS and A Level Physics (9702) : Practical Booklet 4Abdul Ahad SajjadNo ratings yet
- English Assignment-3 23.11.2020 2Document3 pagesEnglish Assignment-3 23.11.2020 2Kshama SinghNo ratings yet
- Aspheric Lenses - Optometry TodayDocument4 pagesAspheric Lenses - Optometry TodaySourav KarmakarNo ratings yet
- Energy Wheel Article ASSP December 2021Document7 pagesEnergy Wheel Article ASSP December 2021moesleiman9No ratings yet
- Design of Stiffeners For Industrial Piping Under External Pressure Using FemDocument6 pagesDesign of Stiffeners For Industrial Piping Under External Pressure Using FemJosip KacmarcikNo ratings yet
- Bct-Module 5Document22 pagesBct-Module 5ValarlaksNo ratings yet
- 3CD358 145pcf ASD 40ksiDocument2 pages3CD358 145pcf ASD 40ksiLitharienNo ratings yet
- Agfa Cameras Accessories 1952Document31 pagesAgfa Cameras Accessories 1952pati.gualterosbNo ratings yet
- Model Answer Winter 2014Document21 pagesModel Answer Winter 2014Prashant KasarNo ratings yet
- HDXRF Vs ICP For Nickel and Vanadium in Crude OilDocument7 pagesHDXRF Vs ICP For Nickel and Vanadium in Crude OilMustafa AhsanNo ratings yet
- A) Title of Experiment: D) TheoryDocument7 pagesA) Title of Experiment: D) TheoryAtif BaigNo ratings yet
- Chapter 6 - 1st and 2nd Order Transient Analysis ElectricalDocument54 pagesChapter 6 - 1st and 2nd Order Transient Analysis ElectricalDouglas OngomNo ratings yet
- Simplifying Trigonometric Expressions: I. ObjectivesDocument14 pagesSimplifying Trigonometric Expressions: I. ObjectivesNery GranadaNo ratings yet
- Fleet Oceanographic and Acoustic (RP33)Document234 pagesFleet Oceanographic and Acoustic (RP33)Jose Ricardo MendeZ100% (4)
- Center of Gravity and Centroid:: Assignment 4Document2 pagesCenter of Gravity and Centroid:: Assignment 4Hozaifa ShahadatNo ratings yet
- Introduction To Motor DrivesDocument24 pagesIntroduction To Motor Drivessukhbat sodnomdorjNo ratings yet
- Caledonian College of Engineering: Laboratory ManualDocument35 pagesCaledonian College of Engineering: Laboratory ManualHafsa AlhaddabiNo ratings yet
- 2021 Calibration of Geometric Parameters and Error Compensation of Non-Geometric Parameters For Cable-Driven Parallel RobotsDocument12 pages2021 Calibration of Geometric Parameters and Error Compensation of Non-Geometric Parameters For Cable-Driven Parallel RobotsThanh Hai NguyenNo ratings yet
- Determining SIMS Relative Sensitivity Factors From Ion Implanted External StandardsDocument3 pagesDetermining SIMS Relative Sensitivity Factors From Ion Implanted External StandardsLuigi HernándezNo ratings yet
- Assignment 2Document14 pagesAssignment 2rodjie.hakeNo ratings yet
- Introduction To Robotics and Computer VisionDocument2 pagesIntroduction To Robotics and Computer Visionbereketab mulugetaNo ratings yet
- 8 ClocksDocument40 pages8 Clockshemanth kumarNo ratings yet
- Equilibrium Positions at Instant T 10 CM: A B C D E F G H IDocument17 pagesEquilibrium Positions at Instant T 10 CM: A B C D E F G H IVincent haNo ratings yet
- LOCALIZED INDIGENIZED INSTRUCTIONAL MATERIALS Science 8Document6 pagesLOCALIZED INDIGENIZED INSTRUCTIONAL MATERIALS Science 8joyce kris AlmacinNo ratings yet
- WWW - Manares U Lts - Co.In: Structural DynamicsDocument2 pagesWWW - Manares U Lts - Co.In: Structural Dynamicsvenkatesh.reddy.tabNo ratings yet