You might also like
- DownloadDocument7 pagesDownloadnootsamNo ratings yet
- School of Computer Science and Applied MathematicsDocument5 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
- (1.5.2) Unconstrained Nonlinear ProgrammingDocument25 pages(1.5.2) Unconstrained Nonlinear ProgrammingBartowsky1991No ratings yet
- Gradient-Based Optimization TechniquesDocument21 pagesGradient-Based Optimization TechniquesNeha Randhar DagaNo ratings yet
- Gradient Descent PDFDocument9 pagesGradient Descent PDFbouharaouamanalNo ratings yet
- Module 3Document35 pagesModule 3waqasNo ratings yet
- Numerical Optimization: 1 AnalysisDocument10 pagesNumerical Optimization: 1 AnalysisnarendraNo ratings yet
- Journal of Computational and Applied Mathematics Model-Trust AlgorithmDocument11 pagesJournal of Computational and Applied Mathematics Model-Trust AlgorithmCândida MeloNo ratings yet
- Steepest DescentDocument7 pagesSteepest DescentstankccNo ratings yet
- Global convergence of trust-region SQP filter algorithmDocument25 pagesGlobal convergence of trust-region SQP filter algorithmAndressa PereiraNo ratings yet
- Matrix norms and error analysis summaryDocument15 pagesMatrix norms and error analysis summaryulbrich100% (1)
- ManuscriptDocument9 pagesManuscriptxfliuNo ratings yet
- ConvergeofHybridSpaceMapping AlgDocument12 pagesConvergeofHybridSpaceMapping AlgSofian Harissa DarmaNo ratings yet
- MIT Lectures on Nonlinear Programming MethodsDocument6 pagesMIT Lectures on Nonlinear Programming MethodsRoshan SinghNo ratings yet
- Levenberg-Marquardt Algorithms Vs Trust Region Algorithms: Frank Vanden BerghenDocument4 pagesLevenberg-Marquardt Algorithms Vs Trust Region Algorithms: Frank Vanden Berghenseyed mohammadNo ratings yet
- Defazio NIPS2014Document15 pagesDefazio NIPS2014Montassar MhamdiNo ratings yet
- Scientific Computing - LESSON 8: Nonlinear Equations II 1Document5 pagesScientific Computing - LESSON 8: Nonlinear Equations II 1Lee Hei LongNo ratings yet
- E ≡ 1 f x x aj (x) ∆ wj=η f x x aj (x) η: x∈ D x∈DDocument2 pagesE ≡ 1 f x x aj (x) ∆ wj=η f x x aj (x) η: x∈ D x∈DTameemuddinNo ratings yet
- BarrDocument15 pagesBarrYash MehrotraNo ratings yet
- Advanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsDocument4 pagesAdvanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsKasapaNo ratings yet
- A Randomized Kaczmarz Algorithm With Exponential ConvergenceDocument21 pagesA Randomized Kaczmarz Algorithm With Exponential Convergencesrobik123No ratings yet
- 4curve Fitting TechniquesDocument32 pages4curve Fitting TechniquesSubhankarGangulyNo ratings yet
- Conjugate Gradient MethodDocument8 pagesConjugate Gradient MethodDavid HumeNo ratings yet
- (k+1) K (K) (K) (K) : Recall That A Direction Is A Vector of Unit LengthDocument5 pages(k+1) K (K) (K) (K) : Recall That A Direction Is A Vector of Unit LengthHilal Akmal AdiputraNo ratings yet
- Hintermüller M. Semismooth Newton Methods and ApplicationsDocument72 pagesHintermüller M. Semismooth Newton Methods and ApplicationsパプリカNo ratings yet
- Lecture 12Document4 pagesLecture 12amanmatharu22No ratings yet
- Nagel 2022 - Analytic Model For StriplineDocument12 pagesNagel 2022 - Analytic Model For StriplineKundan SumanNo ratings yet
- A Variable Leaky LMS Adaptive AlgorithmDocument4 pagesA Variable Leaky LMS Adaptive AlgorithmAkilesh MDNo ratings yet
- A Note On The Optimal Convergence Rate of DescentDocument11 pagesA Note On The Optimal Convergence Rate of Descentd. r. o. a.No ratings yet
- Hauser Lecture2Document26 pagesHauser Lecture2simranlps1405No ratings yet
- Local FieldsDocument60 pagesLocal FieldsJodeNo ratings yet
- Lec4 Gradient Method ReviseDocument33 pagesLec4 Gradient Method ReviseJose Lorenzo TrujilloNo ratings yet
- Nesterov CD 2012Document23 pagesNesterov CD 2012bzsahilNo ratings yet
- O'Connor - Common Errors in Numerical ProgrammingDocument17 pagesO'Connor - Common Errors in Numerical ProgrammingDerek O'ConnorNo ratings yet
- Numerical Experiments With Variations of The Gauss-Newton Algorithm For Nonlinear Least SquaresDocument17 pagesNumerical Experiments With Variations of The Gauss-Newton Algorithm For Nonlinear Least SquaresMárcioBarbozaNo ratings yet
- L23 - Postulates of QMDocument24 pagesL23 - Postulates of QMdomagix470No ratings yet
- Has AlgorithmDocument5 pagesHas Algorithm140557No ratings yet
- Numerical Solutions of The Schrodinger EquationDocument26 pagesNumerical Solutions of The Schrodinger EquationqrrqrbrbrrblbllxNo ratings yet
- Lect Notes 3Document63 pagesLect Notes 3Safis HajjouzNo ratings yet
- Curs Tehnici de OptimizareDocument141 pagesCurs Tehnici de OptimizareAndrei BurlacuNo ratings yet
- Hw3sol PDFDocument8 pagesHw3sol PDFShy PeachDNo ratings yet
- Lecture 5Document26 pagesLecture 5Nanditha ANo ratings yet
- Optimal Markovian CouplingsDocument25 pagesOptimal Markovian CouplingsDaniel Contreras SalinasNo ratings yet
- Spectral Projected Gradient Methods: E. G. Birgin J. M. Mart Inez M. Raydan January 17, 2007Document14 pagesSpectral Projected Gradient Methods: E. G. Birgin J. M. Mart Inez M. Raydan January 17, 2007Muhd Izwan IshakNo ratings yet
- Random Processes: Version 2, ECE IIT, KharagpurDocument8 pagesRandom Processes: Version 2, ECE IIT, KharagpurHarshaNo ratings yet
- 03b Notes - wk4Document6 pages03b Notes - wk4Omar Leon IñiguezNo ratings yet
- Symmetry: Extended Convergence Analysis of The Newton-Hermitian and Skew-Hermitian Splitting MethodDocument15 pagesSymmetry: Extended Convergence Analysis of The Newton-Hermitian and Skew-Hermitian Splitting MethodAlberto Magreñán RuizNo ratings yet
- Randomized Simplex Algorithms On Klee-Minty Cubes: Bernd G Artner Martin Henk G Unter M. ZieglerDocument23 pagesRandomized Simplex Algorithms On Klee-Minty Cubes: Bernd G Artner Martin Henk G Unter M. ZieglerPhuoc ThinhNo ratings yet
- A Truncated Nonmonotone Gauss-Newton Method For Large-Scale Nonlinear Least-Squares ProblemsDocument16 pagesA Truncated Nonmonotone Gauss-Newton Method For Large-Scale Nonlinear Least-Squares ProblemsMárcioBarbozaNo ratings yet
- Molecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDocument9 pagesMolecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDushyant PatelNo ratings yet
- Analysis of functional spaces and parabolic equationsDocument64 pagesAnalysis of functional spaces and parabolic equationsFUN FactorNo ratings yet
- Machine Learning For Quantitative Finance: Fast Derivative Pricing, Hedging and FittingDocument15 pagesMachine Learning For Quantitative Finance: Fast Derivative Pricing, Hedging and FittingJ Martin O.No ratings yet
- ECOM 6302: Engineering Optimization: Chapter ThreeDocument56 pagesECOM 6302: Engineering Optimization: Chapter Threeaaqlain100% (1)
- Optimizing With GaDocument27 pagesOptimizing With GaFernando Nicolas Ureta GodoyNo ratings yet
- 17B4 1-AllwebnotesDocument68 pages17B4 1-AllwebnotesAtaaye ZahraNo ratings yet
- Equality Constrained Optimization: Daniel P. RobinsonDocument33 pagesEquality Constrained Optimization: Daniel P. RobinsonJosue CofeeNo ratings yet
- Lecture 17Document2 pagesLecture 17Tấn Long LêNo ratings yet
- Levenberg Marquardt AlgorithmDocument5 pagesLevenberg Marquardt AlgorithmNithin Mohan100% (5)
- Big Problems Incremental MethodsDocument27 pagesBig Problems Incremental MethodsfcordNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- School of Computer Science and Applied MathematicsDocument6 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
- School of Computer Science and Applied MathematicsDocument2 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
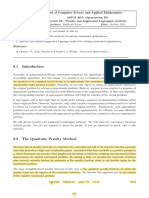
- Lecture 08 - Penalty and Augmented Lagrangian MethodsDocument7 pagesLecture 08 - Penalty and Augmented Lagrangian MethodsFanta CamaraNo ratings yet
- Lecture 09 - Sequential Quadratic ProgrammingDocument4 pagesLecture 09 - Sequential Quadratic ProgrammingFanta CamaraNo ratings yet
- School of Computer Science and Applied Mathematics: X I I NDocument9 pagesSchool of Computer Science and Applied Mathematics: X I I NFanta CamaraNo ratings yet
- School of Computer Science and Applied MathematicsDocument12 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
- Optimization Methods APPM 3017 Lecture 04: Conjugate Gradient MethodsDocument9 pagesOptimization Methods APPM 3017 Lecture 04: Conjugate Gradient MethodsFanta CamaraNo ratings yet
- Lecture 05 - Quasi Newthon MethodsDocument10 pagesLecture 05 - Quasi Newthon MethodsFanta CamaraNo ratings yet
- Turtorial 1Document2 pagesTurtorial 1Fanta CamaraNo ratings yet
- Math2019 - 2020 - Tut Test1 SolutionsDocument1 pageMath2019 - 2020 - Tut Test1 SolutionsFanta CamaraNo ratings yet
- Turtorial 2Document1 pageTurtorial 2Fanta CamaraNo ratings yet
- Scientific Computing With PythonDocument177 pagesScientific Computing With PythonAlbert TavaresNo ratings yet
- Appm 2007 Course Outline NumericsDocument2 pagesAppm 2007 Course Outline NumericsFanta CamaraNo ratings yet
- LA Objectives and Typical QuestionsDocument1 pageLA Objectives and Typical QuestionsFanta CamaraNo ratings yet
- LA Course OutlineDocument1 pageLA Course OutlineFanta CamaraNo ratings yet
- CM Exercise 04 March 2020Document4 pagesCM Exercise 04 March 2020Fanta CamaraNo ratings yet
- CalcIII StokesThmDocument6 pagesCalcIII StokesThmFanta CamaraNo ratings yet
- Classical Mechanics 2020Document158 pagesClassical Mechanics 2020Fanta CamaraNo ratings yet
- Why Eye Is The Important Sensory Organ in Our LifeDocument3 pagesWhy Eye Is The Important Sensory Organ in Our LifeAljhon DelfinNo ratings yet
- We The Digital Citizens - Common Sense EducationDocument5 pagesWe The Digital Citizens - Common Sense EducationMs. Rizza MagnoNo ratings yet
- Philippines Supreme Court upholds constitutionality of law calling constitutional conventionDocument4 pagesPhilippines Supreme Court upholds constitutionality of law calling constitutional conventionVeah CaabayNo ratings yet
- Clipping (Advanced Grammar)Document3 pagesClipping (Advanced Grammar)Adriana MarcosNo ratings yet
- M.2 - R-Value References - Learn C++Document18 pagesM.2 - R-Value References - Learn C++njb25bcnqfNo ratings yet
- CRQ Sample Questions and AnswersDocument10 pagesCRQ Sample Questions and AnswersBadda SarNo ratings yet
- Group-5-Chapter-IV - Abstract, Summary, Conclusion, and ReccomendationDocument38 pagesGroup-5-Chapter-IV - Abstract, Summary, Conclusion, and Reccomendationjelian castroNo ratings yet
- NP 4Document4 pagesNP 4Hamad RayhanNo ratings yet
- Homework 6Document19 pagesHomework 6Trần Phạm Minh ĐăngNo ratings yet
- Evidence Law ProjectDocument20 pagesEvidence Law ProjectxyzNo ratings yet
- Sarah Lowthian.: Hello My Name IsDocument3 pagesSarah Lowthian.: Hello My Name Isapi-225679366No ratings yet
- 50 Hour Foundation Course Complete English Tenses Class 2 1Document79 pages50 Hour Foundation Course Complete English Tenses Class 2 1Riya KushwahNo ratings yet
- Paul's View of Justification and Last JudgmentDocument13 pagesPaul's View of Justification and Last JudgmentMik3reyesNo ratings yet
- BS EN ISO 14253 12017 (The British Standards Institution) (Z-Library) PDFDocument32 pagesBS EN ISO 14253 12017 (The British Standards Institution) (Z-Library) PDFMohammed SirelkhatimNo ratings yet
- Question Bank Topic 1 Economic Thinking and Choice in A World of ScarcityDocument19 pagesQuestion Bank Topic 1 Economic Thinking and Choice in A World of ScarcityHide Yasu NakajimaNo ratings yet
- Error of DispensationalismDocument3 pagesError of DispensationalismJesus Lives100% (1)
- Adverb Exercise AnswerDocument3 pagesAdverb Exercise AnswerNatalia ErvinaNo ratings yet
- Nmat Test Result-1017051213Document1 pageNmat Test Result-1017051213Dushyant SarvaiyaNo ratings yet
- RobertHalf UK Salary Guide 2016Document46 pagesRobertHalf UK Salary Guide 2016Pablo RuibalNo ratings yet
- Song - Nothing Man by Pearl JamDocument4 pagesSong - Nothing Man by Pearl JamLeticia PlazaNo ratings yet
- Analyzing Customer Support at eSewa FonepayDocument50 pagesAnalyzing Customer Support at eSewa FonepayGrishma DangolNo ratings yet
- Brain-Ring "What? Where? When?"Document4 pagesBrain-Ring "What? Where? When?"Оксана ГорькаяNo ratings yet
- Meaning of Population EducationDocument28 pagesMeaning of Population Educationanon_896879459No ratings yet
- Department of History, III BA A' Paper-VI Ancient Karnataka History KNMNC, Shivamogga. Historical SourcesDocument7 pagesDepartment of History, III BA A' Paper-VI Ancient Karnataka History KNMNC, Shivamogga. Historical SourcesBharat KumarNo ratings yet
- Reaction KineticsDocument37 pagesReaction KineticsDaisyNo ratings yet
- Multiple Bond in CovalentDocument24 pagesMultiple Bond in CovalentAshly GonNo ratings yet
- Biography: Rex NettlefordDocument1 pageBiography: Rex NettlefordYohan_NNo ratings yet
- Communicating in Teams and OrganizationsDocument6 pagesCommunicating in Teams and Organizationserielle mejicoNo ratings yet
- Elecius Franklin IndictmentDocument2 pagesElecius Franklin Indictmentthe kingfishNo ratings yet