Professional Documents
Culture Documents
Um2197 Electronic Speed Controller For BLDC and PMSM Three Phase Brushless Motor Stmicroelectronics
Uploaded by
Sebas FrojanOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Um2197 Electronic Speed Controller For BLDC and PMSM Three Phase Brushless Motor Stmicroelectronics
Uploaded by
Sebas FrojanCopyright:
Available Formats
UM2197
User manual
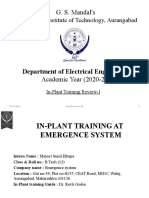
Electronic speed controller for BLDC and PMSM three phase brushless motor
Introduction
The STEVAL-ESC001V1 reference design for electronic speed controllers (ESC) for drones fits entry-level commercial drone
designs and drives any three-phase brushless (or PMSM) motor running off 6S LiPo battery packs, or any equivalent DC supply,
up to 30 A peak current.
The STEVAL-ESC001V1 lets you spin a motor and its propeller in minutes thanks to a complete pre-configured firmware
package (STSW-ESC001V1), implementing a sensorless Field Oriented Controlled algorithm with 3-shunt current reading,
speed control and full active braking.
The reference design board can accept commands from a flight control unit through PWM signals; other communication bus
interfaces like UART, CAN, and I²C are also available. The reference embeds a battery eliminator circuit working at 5 V, an NTC
sensor for temperature measurement and circuitry for overcurrent / overvoltage protection (OCP/OVP). The compact form factor
and current capability render this reference design suitable for electronic speed controllers on small and light unmanned aerial
vehicles like professional drones.
The STSW-ESC001V1 firmware/software package plus STM32 PMSM FOC software development kit - MC library let you refine
your electronic speed controller design by acting on the field oriented control parameters embedded in the STM32 and
experiment with the ST motor profiler to rapidly retrieve the motor parameters. The ST sensorless FOC algorithm ensures
longer flight times and optimal dynamic performance.
The STEVAL-ESC001V1 has been designed around the highly efficient, low Rdson STripFET F7 power MOSFETs, the high-
performance STM32F303CBT7 microcontroller with ARM® Cortex®-M4 core and the L6398 drivers.
Figure 1. STEVAL-ESC001V1 evaluation board
UM2197 - Rev 2 - November 2018 www.st.com
For further information contact your local STMicroelectronics sales office.
UM2197
Main features
1 Main features
• Complete reference design for electronic speed controller implementing a sensorless FOC algorithm
• Designed for drones with 6S pack of LiPo batteries or systems with an equivalent suitable DC supply
• ESC ready for communication with any standard flight control unit (FCU): PWM or CAN
• Temperature overheating protection
• Nominal operating voltage range: 3S-6S Li-Po battery DC voltage level (11.1 to 22.2 V)
• Maximum RMS output current: 20 Arms
• Output peak current: 30 A
• Battery eliminator circuit (BEC): 5 V/0.5 A for external receiver or FCU
• Complete pre-configured firmware package available (STSW-ESC001V1)
• Supported by ST motor control software SDK and ST motor profiler
• Compact PCB design: 29.1 x 58 mm
• Further target applications:
– motor driving for RC vehicles: electric cars, helicopter, trucks, etc.
– any three-phase BLDC or PMSM motor application
• RoHS and WEEE compliant
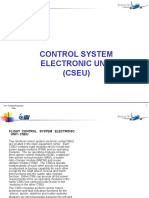
1.1 Target application
Motor driving for remote control vehicles, UAV drones, electrical cars and boats, etc.
Figure 2. STEVAL-ESC001V1 target applications
UM2197 - Rev 2 page 2/26
UM2197
Description
2 Description
The STEVAL-ESC001V1 electronic speed controller (ESC) evaluation board drives a single three phase
brushless motor with very high performance in sensorless mode (without position sensor).
It is designed to provide fast and efficient propulsion for remote control applications like electric cars, boats and
drones and is capable of low and very high speed regulation and strong dynamic response under different load
conditions.
An external signal via a communication bus between the board and a generic central unit sets the speed
regulation reference and another signal reports the status of the system, including faults, which the central unit
can use to trigger corrective events..
The same 6Step (or trapezoidal) control algorithm (often with no shunt resistors) drives the many different ESCs
offering various motor current, size and input voltages for remote control applications.
A more sophisticated control algorithm is used in the STEVAL-ESC001V1, based on field oriented control (FOC);
it features:
• better torque control
• motor current regulation in case of fast load change
• vibration reduction
• active braking function
• better efficiency
• noise reduction
• a real-time monitor of the rotor speed
• energy recovery during the deceleration
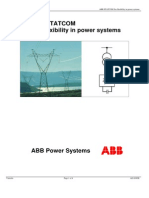
The typical system architecture pictured below shows individual ESC boards connected to single brushless
motors in a quadcopter system. An external Li-Po battery powers the four boards and a wired bus carries
communication between each board and an external unit such as a flight control board.
UM2197 - Rev 2 page 3/26
UM2197
Description
Figure 3. System structure overview
Figure 4. Typical quadcopter architecture
UM2197 - Rev 2 page 4/26
UM2197
STEVAL-ESC001V1 hardware overview
The on-board I²C, UART, PWM and CAN communication protocols provide maximum flexibility and a DC-DC
converter with 5 V output connector (BEC) can supply an external control unit or sensor board.
2.1 STEVAL-ESC001V1 hardware overview
The STEVAL-ESC001V1 power and control platform is based on the ST componentry illustrated below.
Figure 5. STEVAL-ESC001V1 block diagram
2.1.1 STEVAL-ESC001V1 top side components
The inverter section is formed by the L6398 gate driver and the STL160N4F7 and the Power MOSFETs.
Figure 6. Top side features
L6398 high voltage high and low-side driver
The L6398 is a high voltage device manufactured with the BCD™ “offline” technology. It is a single-chip half
bridge gate driver for the N-channel power MOSFET or IGBT.
The high-side (floating) section is designed to stand a voltage rail up to 600 V. The logic inputs are CMOS/TTL
compatible down to 3.3 V for the easy interfacing microcontroller/DSP.
Key features:
• High voltage rail up to 600 V
UM2197 - Rev 2 page 5/26
UM2197
STEVAL-ESC001V1 hardware overview
• dV/dt immunity ±50 V/ns in full temperature range
• Driver current capability:
– 290 mA source
– 430 mA sink
• Switching times 75/35 ns rise/fall with 1 nF load
• 3.3 V, 5 V TTL/CMOS input comparators with hysteresis
• Integrated bootstrap diode
• Fixed 320 ns deadtime
• Interlocking function
• Compact and simplified layout
• Bill of material reduction
• Flexible, easy and fast design
STL160N4F7 160 A STripFET™ F7 Power MOSFETs
This N-channel Power MOSFET uses STripFET™ F7 technology with an enhanced trench gate structure that
results in very low on-state resistance, while also reducing internal capacitance and gate charge for faster and
more efficient switching.
L7986, LD1117S50 and LD39050PU33R
These devices provide the appropriate voltage for gate driving, BEC output and MCU power.
2.1.2 STEVAL-ESC001V1 bottom side components
Bottom side componentry is mainly for the digital section; featuring an STM32F303 microcontroller for three-shunt
sensorless FOC control in an LQFP 48-pin package.
STM32F303xB 32-bit ARM Cortex-M4 MCU with 128 Kbytes Flash and 72 MHz CPU
The family of microcontrollers is based on the high-performance ARM®Cortex®-M4 32-bit RISC core plus FPU
operating at 72 MHz max and embedded memory protection unit (MPU).
Figure 7. Bottom side features
UM2197 - Rev 2 page 6/26
UM2197
Communication, programming and command interfaces
2.1.3 Board dimensions (29.1 x 58 mm)
Figure 8. STEVAL-ESC001V1 board dimensions (not including capacitors)
2.2 Communication, programming and command interfaces
The STEVAL-ESC001V1 features these communication interfaces:
• CAN port (J1): comes with an on-board transceiver; the J1 connector includes 3V3 and GND pins.
• UART/I²C port (J2): normally used for serial communication between the ESC board and a PC; ST MC
Workbench can be connected with the STM32, adding an external circuit (requires USB/RS232
converter-3v3 level)
Figure 9. UART TX/RX (3v3 level)
• PWM signal input (J3): connects with an external board (e.g., flight control unit), to receive commands; the
signal level (at 3v3) sets the motor speed according to the Ton duration (i.e., 1060 µs for min. speed and
1860 µs for max. speed). Other pins are for GND and a +5Vdc power line to supply an external board
• SWD debug port (J4): provides the SWD connection between the STM32 and ST-LINK programmer; other
pins like 3V3 and GND are available.
2.3 STM32 pinout for motor control
Table 1. Main STM32 pinout for motor control
Pin Default Signal Solder Bridge
1 VBAT 3V3
2 PC13/TAMP/RTC TP4
3 PC14 N.C.
UM2197 - Rev 2 page 7/26
UM2197
STM32 pinout for motor control
Pin Default Signal Solder Bridge
4 PC15 N.C.
5 PF0/OSC-IN OSC 8Mhz
6 PF1/OSC-OUT OSC 8Mhz R4
7 NRST RESET
8 VSSA/VREF- GND
9 VDDA/VREF+ 3V3
10 PA0-WKUP Curr_fdbk1
11 PA1 Curr_fdbk2
12 PA2 Curr_fdbk3
13 PA3 Temperature feedback
14 PA4 VREF, DAC1, TP8 R6 N.M.
15 PA5 DAC2, TP9
16 PA6 N.C.
17 PA7 Vshunt_1_filtered
18 PB0 Vshunt_2_filtered
19 PB1 TIM1_CH3N
20 PB2 STATUS
21 PB10 N.C.
22 PB11 Vshunt_3_filtered
23 VSS1 GND
24 VDD1 3V3
25 PB12 PHASE_1
26 PB13 VBUS R5
27 PB14 PHASE_2
28 PB15 PHASE_3
29 PA8 TIM1_CH1
30 PA9 TIM1_CH2 R51
31 PA10 TIM1_CH3
32 PA11 TIM1_CH1N
33 PA12 TIM1_CH2N
34 PA13 SWDIO
35 VSS2 GND
36 VDD2 3V3
37 PA14 SWCLK
38 PA15 INPUT
39 PB3 N.C.
40 PB4 TP3
41 PB5 N.C.
42 PB6 USART1_TX/I2C1_SCL
43 PB7 USART1_RX/I2C1_SDA
UM2197 - Rev 2 page 8/26
UM2197
STM32 pinout for motor control
Pin Default Signal Solder Bridge
44 BOOT0 BOOT0 R3
45 PB8 CAN_RX
46 PB9 CAN_TX
47 VSS
48 VDD
Table 2. Input/output terminals
Screw Terminal Function
J5/J6 Li-Po battery power input (3S-6S)
J7 3-PH Motor connector
UM2197 - Rev 2 page 9/26
UM2197
Initializing and using the STEVAL-ESC001V1 ESC board
3 Initializing and using the STEVAL-ESC001V1 ESC board
Step 1. Connect the ST-LINK/V2 programmer to the J4 connector on the board.
Table 3. Relationship between the STEVAL board SWD pinout and SWD on ST-Link/V2
programmer
ST-LINK/V2 Target connection Pin no. in STEVAL-
Pin no. in STLINK ST-LINK/V2 function
connector (SWD) ESC001V1 (J4 connector)
1 VAPP Target VCC MCU VDD 1
2 VAPP Target VCC MCU VDD 1
6 GND 4
7 SW IO SWDIO 3
9 SW CLK SWCLK 2
Figure 10. STEVAL-ESC001V1 connection for MCU programming
Step 2. Set the SWD interface in the IDE tool
UM2197 - Rev 2 page 10/26
UM2197
Initializing and using the STEVAL-ESC001V1 ESC board
Figure 11. Sample SWD configuration on IAR tool
Step 3. Solder the three motor wires U,V,W at the motor connector with no particular color sequence.
As shown in Figure 12. STEVAL-ESC001V1 input/output connection, the right side is for the motor
connection with three pads provided for soldering.
Step 4. Solder the PWM input at J3 connector.
The INPUT pin level must not exceed 3V3.
Step 5. Connect the STEVAL-ESC001V1 with a Li-Po battery (or DC power supply: min 3S – max 6S) with the
right polarity and turn ON.
The input connector has two large pads for soldering: the top layer for GND and bottom for Vdc+. A
transil device prevents damage in case of reverse polarity.
UM2197 - Rev 2 page 11/26
UM2197
Initializing and using the STEVAL-ESC001V1 ESC board
Figure 12. STEVAL-ESC001V1 input/output connection
Step 6. Verify if the green led is turned on.
Step 7. Open ST MC
Figure 13. ST MC Workbench
Step 8. Fill in the motor parameters
UM2197 - Rev 2 page 12/26
UM2197
Initializing and using the STEVAL-ESC001V1 ESC board
Figure 14. ST MC Workbench – electrical motor parameters
Step 9. Fill in the startup parameters
UM2197 - Rev 2 page 13/26
UM2197
Initializing and using the STEVAL-ESC001V1 ESC board
Figure 15. ST MC Workbench – startup parameters
Step 10. Open the correct workspace in your IAR IDE tool (STM32F30x_Workspace)
Step 11. Select the STM32303C-EVAL_SINGLEDRIVE project configuration (blue arrow), compile the source
code and upload the binary to the MCU (red arrow)
Figure 16. IAR tool select, compile and upload
Step 12. Generate a PWM signal at 490 Hz and duty cycle between 1060 µs and 1860 µs
The ESC is not armed (no driving signals generated) if the duty cycle is lower than 1060 µs.
UM2197 - Rev 2 page 14/26
UM2197
Initializing and using the STEVAL-ESC001V1 ESC board
If the motor is already started, a blank time of 1500 ms on the PWM signal switches the system off
(ESC turned OFF).
Figure 17. PWM input signal for motor speed regulation
Step 13. The motor starts to rotate between the minimum and maximum speed.
UM2197 - Rev 2 page 15/26
UM2197
Schematic diagrams
4 Schematic diagrams
Figure 18. STEVAL-ESC001V1 circuit schematic (1 of 4)
+3v3 +3.3V TP1 R1 J1
CAN_TX 0 CAN
1
2
1
U1 3
CAN_TX 1 8 +3.3V 4
2 D RS 7 R2
3 GND CANH 6 120
+3.3V VCC CANL
C1 CAN_RX 4 5
100nF R VREF
SN65HVD230
1
TP2
CAN_RX
V-
Figure 19. STEVAL-ESC001V1 circuit schematic (2 of 4)
+3v3 +3.3V
4 GND
GREEN RED 3 SWDIO
D2 D1 SWCLK
2
+3.3V
1
3 SWD
+5V J4
2
INPUT
1
510 510 PWMINPUT
R8 R7 J3
4 GND
+3.3V
3
PPM from FC unit 2
USART1_RX/I2C1_SDA
USART1_TX/I2C1_SCL
+3.3V STATUS 1
UART
J2
Vshunt_2_filtered
Vshunt_1_filtered
TIM1_CH3N
STATUS TP9
1
Vshunt_3_filtered
TP8 100nF
C13
PB1-WL
0N.M
DAC_OUT2
VREF
DAC_OUT
R6
Temperature feedback
100nF 1nF 100nF PhW
C12 C11 C10 TP7 PhV
TP6 PhU
21
22
24
23
20
19
16
14
18
17
13
15
VBUS PB13-BUSV +3.3V TP5 1µF 100nF
0
1
R5 C9 10nF 4.7µF
VDD1
VSS1
PB1
PB11
PB2
PB0
PB10
PA7
PA6
PA4
PA3
PA5
PA2 Curr_fdbk3 C7 C6 C8
1
PA1 12 PA2-PhW Curr_fdbk2
PHASE_1 PB12 STM32F303CBT7 PA0-WKUP 11 PA1-PhV Curr_fdbk1
25 PB13 VDDA/VREF+ 10 PA0-PhU
+3.3V
PHASE_2 26 PB14 VSSA/VREF- 9
PHASE_3 27 PB15 NRST 8
TIM1_CH1 28 PA8 PF1/OSC-OUT 7
TIM1_CH2 PA8-UH 29 PA9 PF0/OSC-IN 6
TIM1_CH3 PA9-VH 30 PA10 PC15 5
TIM1_CH1N PA10-WH 31 PA11 PC14 4
TIM1_CH2N PA11-UL 32 PA12 PC13/TAMP/RTC 3 220
PA12-VL 33 PA13 VBAT 2 R4
SWDIO
34 VSS2 1
BOOT0
35
PA14
PA15
VDD2
VDD
VSS
PB4
PB3
PB6
PB7
PB8
PB9
PB5
36 X18MHz
1nF
100nF C4 U2
41
42
40
44
43
46
47
48
45
37
38
39
C5 1nF 100nF
C3 C2 1
TP4
+3.3V
SWCLK
+3.3V
GPIO1 INPUT
CAN_TX
CAN_RX V-
10k
TP3 1 R3
USART1_TX/I2C1_SCL
USART1_RX/I2C1_SDA
UM2197 - Rev 2 page 16/26
UM2197
Schematic diagrams
Figure 20. STEVAL-ESC001V1 circuit schematic (3 of 4)
3V3
For internal comparator
OCP circuit
R9
33K
VREF Vshunt_1 R10 Vshunt_1_filtered Vshunt_2 R11 Vshunt_2_filtered Vshunt_3 R12 Vshunt_3_filtered
C14 680 680 680
100nF 0.5 V
R13 C15 C16
5.9K 15nF 6.3V C17 15nF 6.3V
15nF 6.3V
3V3 3V3
3V3 3V3 3V3
3V3 C18
C19
100nF C21
R15 100nF C23
C20 R14 680pF 10V 8060 1% C22 R16
8060 1% 8060 1% 100nF
5
5
Vshunt_1 680pF 10V U5 Vshunt_2 U3 680pF 10V
Vshunt_3
5
R17 3 TSV991ILT R19 3 TSV991ILT
+ +
787 1 Curr_fdbk1 787 1 Curr_fdbk2 R20 3
Vshunt_1_GND Vshunt_2_GND +
4 4 787 1
- - Curr_fdbk3
R18 Vshunt_3_GND 4
R21 -
3.4k 1% 3.4k 1% R22 U4
2
2
3.4k 1% TSV991ILT
2
R23 13k 1%
R25 13k 1% R24
C24 13k 1%
C25 N.M. 100pF C26
N.M. 100pF N.M. 100pF
External op-amp
+3v3 3V3
V-
Figure 21. STEVAL-ESC001V1 circuit schematic (4 of 4)
AUX POWER SUPPLY
U6
J5
L7986TR
+10V
38Vmax 10
VCC10 1
LPS4018-333MR Coilcraft
33uH/0.5A
1
OUT1
V+ 9
VCC9
L1 33uH
0.5A CON1
C28 8 OUT2
2
POWER SECTION
220nF 11 GND 3 C27
V- EP SYNC J6
3.9nF
7 4 R26 1 VIN+
1MHz Fsw EN R27 V+
4.7k 1%
C29 6 5 62
FB COMP R28 CON1
2
D3 D4 C31 1uF X7R
10uF, 50V STPS1L40M C30 TP11 1 2 C32 C35
22uF 25V TP10 TP CH1N 330uF,35V 330uF,35V C33 C34
C36 TP CH1 STPS0560Z 0 D6 D5 + +
V-
27pF R30 56 STL160N4F7 SMBJ26A-TR
1
R29 R31 U7 Q1 100nF 100V 100nF 100V
1
34.8k 1% R32 C37 300 1% 1 8 BAT30KFILM
TIM1_CH1N LIN BOOT
8.2k 4.7nF TIM1_CH1 2 7 R33 100
3 HIN HVG 6
+10V VCC OUT
4 5 R34
small signal GND LVG 10k
C38 C39 C40 L6398DTR
100pF 100pF 470nF X7R
D7
R35 56 R36
1
BAT30KFILM
R37 100
Q2
R38
STL160N4F7
BEC 5V, 0.5A D8
R39
10k C41
10nF
TP13 1 2 C42 1uF X7R
+10V +5V TP12 TP CH2N BAT30KFILM
TP CH2 Vshunt_1
U8 STPS0560Z 0
U9 LD1117S50 TR R41 LD39050PU33R +3v3 R40 56 STL160N4F7
1
3 2 +5V 0 6 5 U10 Q3
Vin Vout VIN NC 4
1
1 1 8 D9
GND EN VOUT TIM1_CH2N LIN BOOT
3 TIM1_CH2 2 7 R42 100
PG GND GND1 C43 3 HIN HVG 6
1 +10V VCC OUT
C46 1uF 4 5 R43
C44 C45 1uF 7 2 GND LVG 10k
100nF 10uF C47 C48 C49 L6398DTR Motor
100pF 100pF 470nF X7R
OUT1 3
D10 OUT2 2
R44 56 OUT3 1
BAT30KFILM R46 J7
R45 100 1
Q4
R47 STL160N4F7
R48
D11 10k
TP15 1 2 C50 1uF X7R C51
TP14 TP CH3N
TP CH3
PHASE SENSING CIRCUIT STPS0560Z 0
R49 56 D12 STL160N4F7
Vshunt_2 10nF
1
PHASE_1 U11 Q5
1
TIM1_CH3N 1 8 BAT30KFILM
2 LIN BOOT 7 R50 100
PHASE_2 TIM1_CH3 HIN HVG
3 6
+10V VCC OUT
PHASE_3 4 5 R51
GND LVG 10k
OUT1 R52 C52 C53 C54 L6398DTR
33k 1% 100pF 100pF 470nF X7R
OUT2 R53
33k 1%
OUT3 R54 R55 56 D13
33k 1%
R56 C55 C56 C57 BAT30KFILM R58
4.02k 1% R57 100nF 100nF 100nF R59 100 1
4.02k 1% Q6
R60 R61 STL160N4F7
4.02k 1% 10k
C58
Vshunt_3
10nF
+3v3
VIN+
R62 D14
SHUNT RESISTOR
Temperature feedback
BAT30KFILM
169K 1% Vshunt_1 Vshunt_2 Vshunt_3
C59
+3v3 10nF 10V VBUS_SENS
VBUS
R63 R64 R66 R67
1 2 R65 0.010 3W 0.010 3W 0.010 3W
4.7k Vshunt_1_GND Vs h u n t _ 2 _ GND Vs h u n t _ 3 _ GND
NTC 10K R68 C60
4.7nF 10V
18K 1%
VBUS
UM2197 - Rev 2 page 17/26
UM2197
Bill of materials
5 Bill of materials
Table 4. STEVAL-ESC001V1 bill of materials
Item Q.ty Ref. Part / Value Description Manufacturer Order code
C1, C2, C5, C8, C10
C12, C13, C14, C18 100 nF 25 V
1 15 Ceramic capacitor any
C19, C23, C44, C55 ±10% X7R
C56, C57
1 nF 50 V
2 3 C3, C4, C11 Ceramic capacitor any
±10% X7R
4.7 µF 10 V
3 1 C6 Ceramic capacitor Murata GRM188R61A475KE15D
±10% X5R
10 nF 50 V
4 2 C7, C59 Ceramic capacitor any
±10% X7R
1 µF 16 V
5 3 C9, C43, C46 Ceramic capacitor TDK C1608X7R1C105K080AC
±10% X7R
15 nF 10 V
6 3 C15, C16, C17 Ceramic capacitor any
±10% X7R
680 pF 10 V
7 3 C20, C21, C22 Ceramic capacitor any
±5% C0G
Capacitors (not
8 3 C24, C25, C26 100 pF ±0%
mounted)
3.9 nF 50 V
9 1 C27 Ceramic capacitor any
±10% X7R
220 nF 50 V
10 1 C28 Ceramic capacitor any
±10% X7R
10 µF 50 V
11 1 C29 Ceramic capacitor any
±10% X5R
22 µF 25 V
12 1 C30 Ceramic capacitor any
±10% X5R
1 µF X7R 50 V
13 3 C31, C42, C50 Ceramic capacitor any
±10%
330 µF,35 V
14 2 C32, C35 Electrolytic capacitor Rubycon 35ZLH330MEFC10X12.5
±20%
100 nF 100 V
15 2 C33, C34 Ceramic capacitor any
±10% X7R
27 pF 50 V
16 1 C36 Ceramic capacitor any
±5% C0G
4.7 nF 16 V
17 2 C37, C60 Ceramic capacitor any
±10% X7R
C38, C39, C47 100 pF 16 V
18 6 Ceramic capacitor any
C48, C52, C53 ±10% X7R
470 nF 25 V
19 3 C40, C49, C54 Ceramic capacitor any
±10% X7R
10 nF 100 V
20 3 C41, C51, C58 Ceramic capacitor any
±10% X7R
10 µF 25 V
21 1 C45 Ceramic capacitor Murata GRM21BR61E106KA73L
±10% X7R
UM2197 - Rev 2 page 18/26
UM2197
Bill of materials
Item Q.ty Ref. Part / Value Description Manufacturer Order code
22 1 D1 Red LED Lite-on LTST-C193KRKT-5A
23 1 D2 Red LED Lite-on LTST-C193KGKT-5A
Low drop power
24 1 D3 40 V 1 A ST STPS1L40M
Schottky diode
Power Schottky
25 3 D4, D8, D11 60V/0.5A ST STPS0560Z
diode
26 1 D5 Transil ST SMBJ26A-TR
D6, D7, D9, D10
27 7 30V, 0.3A Schottky diode ST BAT30KFILM
D12, D13, D14
CAN, UART: 4 WAYS
28 2 J1, J2 STRIP LINE - MALE any
1.27mm
PWM INPUT: 3 way
29 1 J3
wires welding
SWD: 4-way strip line
30 1 J4 any
- male 2.54mm
CON1 - Input power
31 2 J5, J6 connector: 1-way
wire welding
Motor Connetor: 3-
32 1 J7
way wire welding
33 1 L1 33 µH 0.5 A Power inductor Coilcraft LPS4018-333MRB
Q1, Q2, Q3 30 V, 160 A STL160NS3LLH7
34 6 Power MOSFETs ST
Q4, Q5, Q6 40 V, 160 A STL160N4F7
R1, R5, R28 0 62.5 mW
35 6 SMD resistor any
R39, R41, R48 ±5%
120 62.5 mW
36 1 R2 SMD resistor any
±5%
10 k 62.5 mW
37 1 R3 SMD resistor any
±5%
220 62.5 mW
38 1 R4 SMD resistor any
±5%
39 1 R6 62.5 mW ±5% SMD resistor any
510 62.5 mW
40 2 R7, R8 SMD resistor any
±5%
33 K 62.5 mW
41 1 R9 SMD resistor any
±5%
680 62.5 mW
42 3 R10, R11, R12 SMD resistor any
±5%
5.9 K 62.5 mW
43 1 R13 SMD resistor any
±5%
8.06 k 62.5
44 3 R14, R15, R16 SMD resistor Vishay CRCW04028K06FKED
mW ±1%
787 62.5 mW
45 3 R17, R19, R20 SMD resistor Panasonic ERJ2RKF7870X
±1%
3.4 k 62.5 mW
46 3 R18, R21, R22 SMD resistor Panasonic ERJ2RKF3401X
±1%
UM2197 - Rev 2 page 19/26
UM2197
Bill of materials
Item Q.ty Ref. Part / Value Description Manufacturer Order code
13 k 62.5 mW
47 2 R23, R24, R25 SMD resistor any
±1%
4.7 k 62.5 mW
48 1 R26 SMD resistor any
±1%
4.7 k 62.5 mW
49 1 R65 SMD resistor any
±5%
62 62.5 mW
50 1 R27 SMD resistor any
±1%
34.8 k 62.5
51 1 R29 SMD resistor any
mW ±1%
R30, R35, R40
52 6 56 0.1 W ±5% SMD resistor any
R44, R49, R55
300 62.5 mW
53 1 R31 SMD resistor any
±1%
8.2 k 62.5 mW
54 1 R32 SMD resistor any
±1%
R33, R37, R42 100 0.1 W
55 6 SMD resistor any
R45, R50, R59 ±5%
R34, R38, R43 10 k 0.1 W
56 6 SMD resistor any
R47, R51, R61 ±5%
1 0.125 W
57 3 R36, R46, R58 SMD resistor any
±5%
33 k 0.1 W
58 3 R52, R53, R54 SMD resistor any
±1%
4.02 k 62.5
59 3 R56, R57, R60 SMD resistor any
mW ±1%
169 K 62.5
60 1 R62 SMD resistor any
mW ±1%
NTC 10 K
61 1 R63 NTC Thermistor TDK NTCG103JF103F
±1%
10 mOhm shunt Bourns CRA2512-FZ-R010ELF
62 3 R64, R66, R67 0.01 3 W ±1%
resistor KOA Speer TLR3APDTE10L0F50
18 K 62.5 mW
63 1 R68 SMD resistor any
±1%
TP1, TP2, TP3, TP4
TP5, TP6, TP7, TP8
SMD PAD 1
64 1 TP9, TP10, TP11 Test point any
mm ±0%
TP12, TP13, TP14
TP15
65 1 U1 CAN transceiver TI SN65HVD230D
66 1 U2 32bit MCU ST STM32F303CBT7
Rail-to-rail input/
67 3 U3, U4, U5 output 20 MHz GBP ST TSV991ILT
operational amplifiers
3 A step-down
68 1 U6 ST L7986TR
switching regulator
High voltage high
69 3 U7, U10, U11 ST L6398D
and low-side driver
UM2197 - Rev 2 page 20/26
UM2197
Bill of materials
Item Q.ty Ref. Part / Value Description Manufacturer Order code
Low drop vo ltage
70 1 U8 ST LD39050PU33R
regulator
Low drop vo ltage
71 1 U9 ST LD1117S50TR
regulator
72 1 X1 Resonators 8 Mhz Murata CSTCE8M00G55-R0
UM2197 - Rev 2 page 21/26
UM2197
Revision history
Table 5. Document revision history
Date Version Changes
07-Apr-2017 1 Initial release.
Updated Introduction and Section 5 Bill of materials.
13-Nov-2018 2
Added references to STL160N4F7.
UM2197 - Rev 2 page 22/26
UM2197
Contents
Contents
1 Main features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2
1.1 Target application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3
2.1 STEVAL-ESC001V1 hardware overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 STEVAL-ESC001V1 top side components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.2 STEVAL-ESC001V1 bottom side components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.3 Board dimensions (29.1 x 58 mm). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Communication, programming and command interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 STM32 pinout for motor control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Initializing and using the STEVAL-ESC001V1 ESC board . . . . . . . . . . . . . . . . . . . . . . . . . .10
4 Schematic diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16
5 Bill of materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18
Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22
UM2197 - Rev 2 page 23/26
UM2197
List of figures
List of figures
Figure 1. STEVAL-ESC001V1 evaluation board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Figure 2. STEVAL-ESC001V1 target applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Figure 3. System structure overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Figure 4. Typical quadcopter architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Figure 5. STEVAL-ESC001V1 block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Figure 6. Top side features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Figure 7. Bottom side features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Figure 8. STEVAL-ESC001V1 board dimensions (not including capacitors) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Figure 9. UART TX/RX (3v3 level) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Figure 10. STEVAL-ESC001V1 connection for MCU programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 11. Sample SWD configuration on IAR tool . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 12. STEVAL-ESC001V1 input/output connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Figure 13. ST MC Workbench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Figure 14. ST MC Workbench – electrical motor parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Figure 15. ST MC Workbench – startup parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 16. IAR tool select, compile and upload. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 17. PWM input signal for motor speed regulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Figure 18. STEVAL-ESC001V1 circuit schematic (1 of 4). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 19. STEVAL-ESC001V1 circuit schematic (2 of 4). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 20. STEVAL-ESC001V1 circuit schematic (3 of 4). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 21. STEVAL-ESC001V1 circuit schematic (4 of 4). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
UM2197 - Rev 2 page 24/26
UM2197
List of tables
List of tables
Table 1. Main STM32 pinout for motor control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Table 2. Input/output terminals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Table 3. Relationship between the STEVAL board SWD pinout and SWD on ST-Link/V2 programmer. . . . . . . . . . . . . . . 10
Table 4. STEVAL-ESC001V1 bill of materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Table 5. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
UM2197 - Rev 2 page 25/26
UM2197
IMPORTANT NOTICE – PLEASE READ CAREFULLY
STMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and improvements to ST
products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on ST products before placing orders. ST
products are sold pursuant to ST’s terms and conditions of sale in place at the time of order acknowledgement.
Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or the design of
Purchasers’ products.
No license, express or implied, to any intellectual property right is granted by ST herein.
Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.
ST and the ST logo are trademarks of ST. All other product or service names are the property of their respective owners.
Information in this document supersedes and replaces information previously supplied in any prior versions of this document.
© 2018 STMicroelectronics – All rights reserved
UM2197 - Rev 2 page 26/26
You might also like
- Steval-Esc001v1 230905 042937Document7 pagesSteval-Esc001v1 230905 042937Nineveh Health DepartmentNo ratings yet
- Um2673 5 KW Low Voltage High Current Inverter For Automotive Motor Control Applications StmicroelectronicsDocument42 pagesUm2673 5 KW Low Voltage High Current Inverter For Automotive Motor Control Applications StmicroelectronicsResiaNo ratings yet
- Central BtyDocument5 pagesCentral BtyrishimaranNo ratings yet
- Control Panel Board ELEMPU User ManualDocument40 pagesControl Panel Board ELEMPU User Manualmohammad ghassan83% (6)
- Um2898 Getting Started With The Stdesemeter1pv1 Single Phase Smart Meter StmicroelectronicsDocument31 pagesUm2898 Getting Started With The Stdesemeter1pv1 Single Phase Smart Meter StmicroelectronicsLucasAndrade730No ratings yet
- Brake by Wire1Document21 pagesBrake by Wire1AdilNo ratings yet
- AVR430: MC300 Hardware User Guide: FeaturesDocument13 pagesAVR430: MC300 Hardware User Guide: FeaturesGoran ŠtetinNo ratings yet
- Submitted To: Mr. Sachin AngadiDocument5 pagesSubmitted To: Mr. Sachin AngadiSachin AngadiNo ratings yet
- Boeing Flight ControlsDocument70 pagesBoeing Flight ControlsCatts Admin100% (1)
- Adjusting Flicker On DisplayDocument11 pagesAdjusting Flicker On Displaywaynecard71No ratings yet
- Brake by Wire1Document21 pagesBrake by Wire1Srikanth HunterNo ratings yet
- Igbt Based On Vector Control of Induction Motor DriveDocument8 pagesIgbt Based On Vector Control of Induction Motor DriveesatjournalsNo ratings yet
- Joystick 1Document28 pagesJoystick 1Nuñez JesusNo ratings yet
- What is an Excitation System? ExplainedDocument24 pagesWhat is an Excitation System? ExplainedGnanaseharan ArunachalamNo ratings yet
- Modularanodecontrol Whitepaper FinalDocument2 pagesModularanodecontrol Whitepaper Finalapi-269200194No ratings yet
- Singh Mod 2003Document6 pagesSingh Mod 2003jains.boyNo ratings yet
- In-Plant Training Review at Emergence SystemsDocument16 pagesIn-Plant Training Review at Emergence SystemsShivaji deshmukhNo ratings yet
- Exciter Ex2100e AcronymsDocument12 pagesExciter Ex2100e AcronymsShamim AbbasNo ratings yet
- A350 Ata 24Document95 pagesA350 Ata 24이봉연100% (1)
- Elecrtical Thrust Vector Control Details - Tillo VanthuyneDocument7 pagesElecrtical Thrust Vector Control Details - Tillo VanthuyneCosmisteNo ratings yet
- t0008 Efm32 g8xx STK User ManualDocument40 pagest0008 Efm32 g8xx STK User Manualkunalkundanam1046No ratings yet
- Brushless Excitation SystemDocument26 pagesBrushless Excitation SystemManish TiwariNo ratings yet
- British Airways CFM56 Training ManualDocument86 pagesBritish Airways CFM56 Training ManualZbor ZborNo ratings yet
- Electrical Power Systems ExplainedDocument31 pagesElectrical Power Systems ExplainedBTMA6-0159 Guardado RivasNo ratings yet
- RTX - Basic Theory ExcitationDocument20 pagesRTX - Basic Theory ExcitationEliyanto E BudiartoNo ratings yet
- Chapter 23 - Engine Control System WECS 3000Document59 pagesChapter 23 - Engine Control System WECS 3000sezar100% (1)
- Airbus 24 A300 A310 Electrical PowerDocument136 pagesAirbus 24 A300 A310 Electrical PowerElijah Paul Merto100% (2)
- Brushless DC Motor Control Using The LPC2141Document18 pagesBrushless DC Motor Control Using The LPC2141Deepa DevarajNo ratings yet
- Manual-MCS1400-48V-25A-NSCSU - January 08Document54 pagesManual-MCS1400-48V-25A-NSCSU - January 08Laxmi Narayan Shakyawar100% (1)
- ECO-MPU Application GuideDocument23 pagesECO-MPU Application GuideAssir El DjazairiNo ratings yet
- An-9019 Motor Drive System Using SPM InverterDocument25 pagesAn-9019 Motor Drive System Using SPM InverterasokanenNo ratings yet
- AN2425 Application Note: Using An ST7ULTRALITE Microcontroller To Drive A TRIAC or An AC Switch For A Mains SupplyDocument21 pagesAN2425 Application Note: Using An ST7ULTRALITE Microcontroller To Drive A TRIAC or An AC Switch For A Mains SupplyMaha SoeNo ratings yet
- Aircraft Electrical System OverviewDocument474 pagesAircraft Electrical System OverviewBianco Yep100% (1)
- Flight Control System Electronic Unit (CSEU) ModulesDocument17 pagesFlight Control System Electronic Unit (CSEU) ModulesTalita CumiNo ratings yet
- Hardware SSNC Modules and ArchitectureDocument68 pagesHardware SSNC Modules and Architecturefiras1976No ratings yet
- ENS26 Automatic Isolation Unit - Product DescriptionDocument20 pagesENS26 Automatic Isolation Unit - Product DescriptiontongaiNo ratings yet
- Design of A Fuzzy Logic Controller Based STATCOM For IEEEDocument6 pagesDesign of A Fuzzy Logic Controller Based STATCOM For IEEEharini shivNo ratings yet
- A Stand-Alone Generating System Using Self-Excited Induction Generators in The Extraction of Petroleum ProductsDocument8 pagesA Stand-Alone Generating System Using Self-Excited Induction Generators in The Extraction of Petroleum ProductsPraveen KumarNo ratings yet
- Research On Differential Protection Algorithms of Power TransformersDocument6 pagesResearch On Differential Protection Algorithms of Power TransformersrstppNo ratings yet
- Steering ElectronicDocument18 pagesSteering ElectronicpricopdanielNo ratings yet
- Presentation on MSDAC: Block Diagram, Modules, Installation & ApplicationsDocument40 pagesPresentation on MSDAC: Block Diagram, Modules, Installation & ApplicationsSonu Alam100% (1)
- ASCVDocument51 pagesASCVJunaidNo ratings yet
- StatCom Application in Power SystemsDocument4 pagesStatCom Application in Power Systemssf111No ratings yet
- Um2933 Getting Started With The Stevalplc001v1 Industrial PLC Evaluation Board With Hmi Interface StmicroelectronicsDocument42 pagesUm2933 Getting Started With The Stevalplc001v1 Industrial PLC Evaluation Board With Hmi Interface StmicroelectronicsivanreyNo ratings yet
- AzLM Axle COunters ReportDocument44 pagesAzLM Axle COunters Reportcdevikar50% (2)
- JVL AC Servo Motor Controllers AMC20, AMC21 and AMC22Document4 pagesJVL AC Servo Motor Controllers AMC20, AMC21 and AMC22ElectromateNo ratings yet
- Design of PLC-based PI Controller For TH PDFDocument5 pagesDesign of PLC-based PI Controller For TH PDFRamesh SahniNo ratings yet
- Basics For Updated Electrohydraulic Axis: A Due Stadi, Pilotate, Dimensioni ISO/Cetop 07 e 08Document4 pagesBasics For Updated Electrohydraulic Axis: A Due Stadi, Pilotate, Dimensioni ISO/Cetop 07 e 08Leo VanNo ratings yet
- IVR - Setting SoftwareDocument16 pagesIVR - Setting SoftwareHachimou Rohingya RoufaiNo ratings yet
- Electrical System: Systems OperationDocument7 pagesElectrical System: Systems OperationTri WahyuningsihNo ratings yet
- Bea Sistemas VolvoDocument32 pagesBea Sistemas Volvoricardov_met100% (11)
- JCB 444 Tier III Electronic Supplement - Issue2Document38 pagesJCB 444 Tier III Electronic Supplement - Issue2Epure Gabriel100% (4)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Protection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsFrom EverandProtection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachFrom EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachNo ratings yet
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Mushroom Storage and ProcessingDocument5 pagesMushroom Storage and ProcessingKho Siong Thong80% (5)
- Greenville Chapter NRHS Aug 2009 NewsletterDocument8 pagesGreenville Chapter NRHS Aug 2009 Newsletterjshopper1No ratings yet
- BTP Presentation - Sem 8Document24 pagesBTP Presentation - Sem 8Nihal MohammedNo ratings yet
- Project Feasibility Study For The Establishment of Footwear and Other AccessoriesDocument12 pagesProject Feasibility Study For The Establishment of Footwear and Other Accessoriesregata4No ratings yet
- TM 9-1651 Data Transmission System m3, January 1942Document78 pagesTM 9-1651 Data Transmission System m3, January 1942Advocate100% (1)
- Microsystems Course Covers Sensors, DesignDocument11 pagesMicrosystems Course Covers Sensors, DesignRaviNo ratings yet
- SQL Server Management Studio Database Engine Query Editor Window - Microsoft DocsDocument6 pagesSQL Server Management Studio Database Engine Query Editor Window - Microsoft DocsAchamyeleh TamiruNo ratings yet
- Meita Juniar - 41921200002 - Teknik Sipil Reg b2 Uas English For EngineerDocument18 pagesMeita Juniar - 41921200002 - Teknik Sipil Reg b2 Uas English For EngineerREG.B/41921200002/MEITA JUNIARNo ratings yet
- ACL Reconstruction BookDocument18 pagesACL Reconstruction BookSergejs JaunzemsNo ratings yet
- Drilling Products and Solutions CatalogDocument141 pagesDrilling Products and Solutions CatalogAlex Boz100% (1)
- Standards in Nursing Education ProgrammeDocument13 pagesStandards in Nursing Education ProgrammeSupriya chhetryNo ratings yet
- GCSE History Revision Guide and Workbook Examines Henry VIII's Reign 1509-1540Document23 pagesGCSE History Revision Guide and Workbook Examines Henry VIII's Reign 1509-1540Haris KhokharNo ratings yet
- Social and cultural geographies of Southeast Asia exploredDocument18 pagesSocial and cultural geographies of Southeast Asia exploredJohn Lemuel MagnayeNo ratings yet
- Big Kaiser2019 PDFDocument624 pagesBig Kaiser2019 PDFGoto SamNo ratings yet
- Penetron Admix FlyerDocument2 pagesPenetron Admix Flyernght7942No ratings yet
- Segilola Gold ProjectDocument11 pagesSegilola Gold ProjectaishaNo ratings yet
- Pulse of Fintech h2 2020Document72 pagesPulse of Fintech h2 2020OleksandraNo ratings yet
- Lab Exercise 3 SoilScie Group4Document10 pagesLab Exercise 3 SoilScie Group4Jhunard Christian O. AsayasNo ratings yet
- Republic of The Philippines, Petitioner, vs. Sandiganbayan, Major General Josephus Q. Ramas and Elizabeth Dimaano, RespondentsDocument23 pagesRepublic of The Philippines, Petitioner, vs. Sandiganbayan, Major General Josephus Q. Ramas and Elizabeth Dimaano, RespondentsKenzo RodisNo ratings yet
- Absorbance at 405Nm: United States PatentDocument20 pagesAbsorbance at 405Nm: United States Patentfelipe_fismed4429No ratings yet
- Welcome To All: Fundamental Analysis Economic AnalysisDocument11 pagesWelcome To All: Fundamental Analysis Economic AnalysisMD.RUMON BAKSHINo ratings yet
- IVECO NEF SeriesDocument36 pagesIVECO NEF SeriesOlivier ORMANNo ratings yet
- Iwan Lab Guide v1.1 FinalDocument63 pagesIwan Lab Guide v1.1 FinalRicardo SicheranNo ratings yet
- Soc 1 Report Salesforce Services - 5EwWEDocument75 pagesSoc 1 Report Salesforce Services - 5EwWEArif IqbalNo ratings yet
- 452-Chapter 15 PDFDocument14 pages452-Chapter 15 PDFYoan Barriga BerriosNo ratings yet
- Capital Harness XC LaunchDocument36 pagesCapital Harness XC LaunchnizarfebNo ratings yet
- Chetan Tour and Travel: Pickup Spot: Destination SpotDocument2 pagesChetan Tour and Travel: Pickup Spot: Destination SpotRahulNo ratings yet
- Sensory Marketing: How Toothpaste Brands Appeal to the SensesDocument17 pagesSensory Marketing: How Toothpaste Brands Appeal to the SensesNavodi RathnasingheNo ratings yet
- Editable Classroom Officers TemplateDocument6 pagesEditable Classroom Officers TemplateRachelle AbalosNo ratings yet
- United States v. Bueno-Hernandez, 10th Cir. (2012)Document3 pagesUnited States v. Bueno-Hernandez, 10th Cir. (2012)Scribd Government DocsNo ratings yet