You might also like
- Self Driving Car Using Aurdin and Rasberry PiDocument6 pagesSelf Driving Car Using Aurdin and Rasberry PiSahana GuddadNo ratings yet
- Behavior Cloning For Self Driving Cars Using Attention ModelsDocument5 pagesBehavior Cloning For Self Driving Cars Using Attention ModelsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- IoTbasedsmartparkingsystemDocument5 pagesIoTbasedsmartparkingsystemanawaz007No ratings yet
- Vehicle Detection Trackingand CountingDocument8 pagesVehicle Detection Trackingand Countingkarthik bandlaNo ratings yet
- Self Drive IEEE Conference Template 1Document5 pagesSelf Drive IEEE Conference Template 1Anant vikram SinghNo ratings yet
- Tits 2020 2980855Document15 pagesTits 2020 2980855rahul rNo ratings yet
- Self-driving car model using Raspberry Pi detects accidents and alerts emergency contactsDocument5 pagesSelf-driving car model using Raspberry Pi detects accidents and alerts emergency contactsSai TejaNo ratings yet
- Ijet V3i4p6Document6 pagesIjet V3i4p6International Journal of Engineering and TechniquesNo ratings yet
- Iot Format WordDocument13 pagesIot Format WordNikhil SnNo ratings yet
- Self Operating CarDocument5 pagesSelf Operating CarkillerNo ratings yet
- AI-based Self-Driving CarDocument9 pagesAI-based Self-Driving CarInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Self-Driving Robotic Car Utilizing Image ProcessinDocument14 pagesSelf-Driving Robotic Car Utilizing Image ProcessinAboubaker IguilizNo ratings yet
- Experiment 8 AISCDocument6 pagesExperiment 8 AISCfacad22886No ratings yet
- EasyChair Preprint 10252Document6 pagesEasyChair Preprint 10252hiraithapeNo ratings yet
- Monocular Camera Based Computer Vision System For Cost Effective Autonomous VehicleDocument5 pagesMonocular Camera Based Computer Vision System For Cost Effective Autonomous Vehicle4728Vishakha KambleNo ratings yet
- Unregistered Vehicle Reorganization On Number Plate Using Raspberry Pi KitDocument6 pagesUnregistered Vehicle Reorganization On Number Plate Using Raspberry Pi KitIJRASETPublicationsNo ratings yet
- Smart Car Parking SystemDocument5 pagesSmart Car Parking SystemGRD JournalsNo ratings yet
- Design & Implementation of Real Time Autonomous Car by Using Image Processing & IoTDocument7 pagesDesign & Implementation of Real Time Autonomous Car by Using Image Processing & IoTTv BraviaNo ratings yet
- A Survey of Technical Trends of ADAS and Autonomous DrivingDocument4 pagesA Survey of Technical Trends of ADAS and Autonomous DrivingFang YuanNo ratings yet
- 308048Document5 pages308048Bhuvan RockNo ratings yet
- Smart Parking ApplicationDocument7 pagesSmart Parking ApplicationDeroly AlfredNo ratings yet
- Online Booking System For Car ParkingDocument4 pagesOnline Booking System For Car Parkingkalanakal9669No ratings yet
- Ieee Paper On IotDocument6 pagesIeee Paper On IotrakshitaNo ratings yet
- Driver Assistance using Raspberry pi: An HD camera and IR sensorDocument4 pagesDriver Assistance using Raspberry pi: An HD camera and IR sensorIshaNo ratings yet
- IJSTEV2I10004Document6 pagesIJSTEV2I10004Bitthal ParidaNo ratings yet
- Onkar Adagale (41218) (Autonomous Vehicle)Document13 pagesOnkar Adagale (41218) (Autonomous Vehicle)Anuja VaishnavNo ratings yet
- ET203 Research Paper PDFDocument5 pagesET203 Research Paper PDFYash SonawaneNo ratings yet
- Self Driving CarsDocument4 pagesSelf Driving CarsMir Aqib HussainNo ratings yet
- B3 G1 AimlDocument27 pagesB3 G1 Aimldihosid99100% (1)
- Smart Car Parking System Using Arduino UNO: Suvarna Nandyal Sabiya Sultana Sadaf AnjumDocument6 pagesSmart Car Parking System Using Arduino UNO: Suvarna Nandyal Sabiya Sultana Sadaf AnjumOluwaseun AlhassanNo ratings yet
- Autonomous Vehicles: Challenges and Advancements in AI-Based Navigation SystemsDocument12 pagesAutonomous Vehicles: Challenges and Advancements in AI-Based Navigation SystemsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Detection System For Stolen Vehicles Using Vehicle Attributes With Deep LearningDocument4 pagesA Detection System For Stolen Vehicles Using Vehicle Attributes With Deep Learningociel felipe gomezNo ratings yet
- Intelligent Car Parking SystemDocument8 pagesIntelligent Car Parking SystemLeo BoyNo ratings yet
- Implementation of An Image Processing Based Smart Parking System Using Haar-Cascade MethodDocument6 pagesImplementation of An Image Processing Based Smart Parking System Using Haar-Cascade MethodSatrio AmiruddinNo ratings yet
- Automated Parking Slot Design and DevelopmentDocument3 pagesAutomated Parking Slot Design and Development123123123No ratings yet
- J Matpr 2020 04 736Document8 pagesJ Matpr 2020 04 736atul bhagatNo ratings yet
- literature-3Document8 pagesliterature-3vini75526No ratings yet
- Shahrukh Ashraf Resume Highlighting Education, Projects, AwardsDocument1 pageShahrukh Ashraf Resume Highlighting Education, Projects, AwardsKhan Shahrukh AshrafNo ratings yet
- Conf 2016 IEEEConf IMAGEPROCESSINGBASEDINTELLIGENTTrafficcontrollDocument5 pagesConf 2016 IEEEConf IMAGEPROCESSINGBASEDINTELLIGENTTrafficcontrollIdris KusumaNo ratings yet
- Self Driving Cars Article #02Document10 pagesSelf Driving Cars Article #02demithehomieNo ratings yet
- Autonomous Vehicle: The Architecture Aspect of Self Driving CarDocument6 pagesAutonomous Vehicle: The Architecture Aspect of Self Driving CarmokhtarNo ratings yet
- Presentation On Project: Presented byDocument26 pagesPresentation On Project: Presented byAnujNo ratings yet
- IoT AssignmentDocument5 pagesIoT AssignmentsumitNo ratings yet
- A_Real-Time_Collision_Detection_System_for_VehiclesDocument6 pagesA_Real-Time_Collision_Detection_System_for_VehiclesMayank LovanshiNo ratings yet
- 10 1109@IoT-SIU 2019 8777722 PDFDocument6 pages10 1109@IoT-SIU 2019 8777722 PDFAkshay KumarNo ratings yet
- Overview of Automated Parking System Using Esp32 and Cloud Computing IJERTCONV11IS04008Document4 pagesOverview of Automated Parking System Using Esp32 and Cloud Computing IJERTCONV11IS04008Hari PrasathNo ratings yet
- Shaping the Future of Transportation with AutomationDocument8 pagesShaping the Future of Transportation with AutomationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Convolutional Neural Network For A Self-Driving Car in A Virtual EnvironmentDocument6 pagesConvolutional Neural Network For A Self-Driving Car in A Virtual EnvironmentChandra LohithNo ratings yet
- MkAbdulJalil2004 APCBasedDrivingSimulatorDocument5 pagesMkAbdulJalil2004 APCBasedDrivingSimulatorPoorvish VenilNo ratings yet
- Parking Navigation and Payment System using IR Sensors and RFIDDocument3 pagesParking Navigation and Payment System using IR Sensors and RFIDutkarsha kundikarNo ratings yet
- Design and Development of Automated Parking Slot: March 2014Document3 pagesDesign and Development of Automated Parking Slot: March 2014Zahara175No ratings yet
- Self Drivingand Driver Relaxing Vehicle 07791248Document6 pagesSelf Drivingand Driver Relaxing Vehicle 07791248RAHUL K SEC 2020No ratings yet
- SPARKS Smart Parking SystemDocument5 pagesSPARKS Smart Parking SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Parking System Based On Cloud Computing Using Android and IotDocument3 pagesSmart Parking System Based On Cloud Computing Using Android and IotInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Self Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningDocument8 pagesSelf Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningKrishna KrishNo ratings yet
- Developing An Advanced Smart Parking SysDocument4 pagesDeveloping An Advanced Smart Parking SysEzzedine ShlibkNo ratings yet
- Fast-Tracking Advanced Driver Assistance Systems (ADAS) and Autonomous Vehicles Development With SimulationDocument7 pagesFast-Tracking Advanced Driver Assistance Systems (ADAS) and Autonomous Vehicles Development With SimulationSiddharth ChauhanNo ratings yet
- Car Parking System Using IR Sensors: International Journal of Advance Research in Engineering, Science & TechnologyDocument4 pagesCar Parking System Using IR Sensors: International Journal of Advance Research in Engineering, Science & TechnologySaqlainNo ratings yet
- Face Detection and Recognition on Mobile DevicesFrom EverandFace Detection and Recognition on Mobile DevicesRating: 1 out of 5 stars1/5 (1)
- Self-Driving Cars: A Platform For Learning and Research: 1 Jacob Newman 2 Zheng Sun 3 Dah-Jye LeeDocument5 pagesSelf-Driving Cars: A Platform For Learning and Research: 1 Jacob Newman 2 Zheng Sun 3 Dah-Jye LeevinothvinozonsNo ratings yet
- Prediction of Brain Tumor On Mri Images Using DeeplearningDocument3 pagesPrediction of Brain Tumor On Mri Images Using DeeplearningvinothvinozonsNo ratings yet
- Iot in Agriculture Sector: Executive SummaryDocument4 pagesIot in Agriculture Sector: Executive SummaryvinothvinozonsNo ratings yet
- DPSD - 2Document85 pagesDPSD - 2vinothvinozonsNo ratings yet
- Cs8351-Digital Principles and System Design Ii Year - Iii Semester - R2017 Unit-IDocument44 pagesCs8351-Digital Principles and System Design Ii Year - Iii Semester - R2017 Unit-Ivinothvinozons100% (1)
- 8421Document4 pages8421vinothvinozonsNo ratings yet
- Crisis ManagementDocument53 pagesCrisis ManagementvinothvinozonsNo ratings yet
- Unit 2 Training Evaluation: StructureDocument15 pagesUnit 2 Training Evaluation: StructurevinothvinozonsNo ratings yet
- 11 - Chapter 4 PDFDocument44 pages11 - Chapter 4 PDFvinothvinozonsNo ratings yet
- 11 - Chapter 4 PDFDocument44 pages11 - Chapter 4 PDFvinothvinozonsNo ratings yet
- Unit 2 Training Evaluation: StructureDocument15 pagesUnit 2 Training Evaluation: StructurevinothvinozonsNo ratings yet
- Contoh Laporan OutputDocument7 pagesContoh Laporan OutputIvan Budi SusetyoNo ratings yet
- SV GuideDocument14 pagesSV GuideirfanmaoNo ratings yet
- openFoamUserManual PFMDocument300 pagesopenFoamUserManual PFMLuis BorrazNo ratings yet
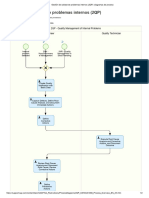
- Gestión de Calidad de Problemas Internos (2QP) - Diagramas de ProcesoDocument2 pagesGestión de Calidad de Problemas Internos (2QP) - Diagramas de ProcesoDiego CincottaNo ratings yet
- Administration Guide: Public 2023-11-25Document454 pagesAdministration Guide: Public 2023-11-25elisette.guittetNo ratings yet
- Financial Management Challenges of Sari-Sari StoresDocument12 pagesFinancial Management Challenges of Sari-Sari StoresloveliecjavierNo ratings yet
- Computer Studies: Paper 7010/01 Written PaperDocument7 pagesComputer Studies: Paper 7010/01 Written Papermstudy123456No ratings yet
- Numerical DifferentiationDocument26 pagesNumerical DifferentiationchibenNo ratings yet
- Toshiba 14DLV75Document116 pagesToshiba 14DLV75naseemNo ratings yet
- Unsteady Friction ModelsDocument32 pagesUnsteady Friction ModelsWalter F SilvaNo ratings yet
- Prabhav Prospectus 2023Document39 pagesPrabhav Prospectus 2023hemal.prabhavonlineNo ratings yet
- Organization of The IBM Personal Computer: Chapter-3Document41 pagesOrganization of The IBM Personal Computer: Chapter-3plabon kumar sahaNo ratings yet
- Lab Guide - CCNSPDocument6 pagesLab Guide - CCNSPRexford AdjeiNo ratings yet
- Anand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DDocument12 pagesAnand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DAashishNo ratings yet
- LibreOffice MSI Package GPO ErrorDocument6 pagesLibreOffice MSI Package GPO Errordbe26054No ratings yet
- Without A Budget: MarketingDocument15 pagesWithout A Budget: MarketingStanly ChristiawanNo ratings yet
- ATM ProjectDocument36 pagesATM Projectv68whrmhwbNo ratings yet
- Digital Phase Selector (Project Report)Document66 pagesDigital Phase Selector (Project Report)Ashish Verma91% (11)
- Answer To Selected Review Questions in Chapter 1Document3 pagesAnswer To Selected Review Questions in Chapter 1moahamd hashemNo ratings yet
- IM Appendix C UCL Verification Ed12Document34 pagesIM Appendix C UCL Verification Ed12Chong Fong KimNo ratings yet
- CloudSDLC Cloud Software Development Life CycleDocument5 pagesCloudSDLC Cloud Software Development Life CycleBlis 2018No ratings yet
- Engro - 9E Cofiring Field Testing Procedure - Rev1Document9 pagesEngro - 9E Cofiring Field Testing Procedure - Rev1Muhammad Younus ShahzadNo ratings yet
- Optical Fiber CommunicationDocument21 pagesOptical Fiber CommunicationKaranDhamijaNo ratings yet
- Curtis-1211 (Manual) 06cDocument46 pagesCurtis-1211 (Manual) 06cSANOMIONo ratings yet
- Imperfekt forms in SwedishDocument6 pagesImperfekt forms in SwedishjflescheNo ratings yet
- International Power Ball LotteryDocument1 pageInternational Power Ball LotteryIrina TetaNo ratings yet
- Verma TicketDocument3 pagesVerma TicketMichelle SandersNo ratings yet
- Detecting Trend Changes with the Head and Shoulders FormationDocument5 pagesDetecting Trend Changes with the Head and Shoulders Formationsatish sNo ratings yet
- 03 Power BI Governance - SureshChanges AutosavedDocument22 pages03 Power BI Governance - SureshChanges AutosavedBruno MartinsNo ratings yet
- VM Command MAPDocument9 pagesVM Command MAPAungkyaw ThuNo ratings yet