You might also like
- BreathControl PDFDocument11 pagesBreathControl PDFClaudio Andrés Mendez CerdaNo ratings yet
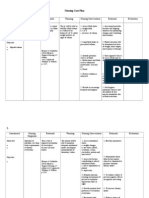
- Nursing Care Plan CKDDocument6 pagesNursing Care Plan CKDReylan Deo Rallo Asio100% (5)
- Starter Program For Catalyst Athletics Online Workouts by Greg Everett PDFDocument8 pagesStarter Program For Catalyst Athletics Online Workouts by Greg Everett PDFdline99100% (1)
- CP System For BulletsDocument37 pagesCP System For BulletsAnonymous TBAzJ8Ejd100% (1)
- Advanced Planning and SchedulingDocument7 pagesAdvanced Planning and Schedulingsheebakbs5144100% (1)
- CC Assignments CurrentDocument53 pagesCC Assignments Currentranjeet100% (3)
- A-Survey Paper Context Awareness for-Smart-EnvironmentDocument6 pagesA-Survey Paper Context Awareness for-Smart-EnvironmentAnre Thanh HungNo ratings yet
- Applied Ergonomics: Dina Burkolter, Benjamin Weyers, Annette Kluge, Wolfram LutherDocument8 pagesApplied Ergonomics: Dina Burkolter, Benjamin Weyers, Annette Kluge, Wolfram LutherFauzan KurniawanNo ratings yet
- Active PerceptionDocument35 pagesActive PerceptionShirin BudhwaniNo ratings yet
- 0chapter-1: Poly-House Is A Elongated Protected Structure Usually For Cultivation of OffDocument76 pages0chapter-1: Poly-House Is A Elongated Protected Structure Usually For Cultivation of OffAvadhani SharmaNo ratings yet
- Udayan Saxena: UsaxenaDocument3 pagesUdayan Saxena: UsaxenaUdayan SaxenaNo ratings yet
- Smartphones As A Light Measurement Tool: Case of Study: ArticleDocument18 pagesSmartphones As A Light Measurement Tool: Case of Study: ArticleAndrei VasileNo ratings yet
- Rescue Wings-Computing and Active Services Support For Disaster Rescue Using PHPDocument4 pagesRescue Wings-Computing and Active Services Support For Disaster Rescue Using PHPLogaNathanNo ratings yet
- H264 Encoder ShortDocument8 pagesH264 Encoder ShortRaoul BitenboisNo ratings yet
- User Modeling in UCSDDocument8 pagesUser Modeling in UCSDPauline Bogador MayordomoNo ratings yet
- Chapter 3Document12 pagesChapter 3marfcelisNo ratings yet
- HCI Ch-4 Interaction LastsDocument65 pagesHCI Ch-4 Interaction LastsAschenakiNo ratings yet
- THESISDocument21 pagesTHESISNithish AnandNo ratings yet
- Chapter 1 - IntroductionDocument9 pagesChapter 1 - IntroductionNithish AnandNo ratings yet
- Weather Prediction SystemDocument17 pagesWeather Prediction SystemSatyanarayan GuptaNo ratings yet
- Lecture 8Document20 pagesLecture 8Muhammad AltamashNo ratings yet
- Abdelrahman Et Al. (2017)Document20 pagesAbdelrahman Et Al. (2017)Oliver GuidettiNo ratings yet
- Context For HCI: - Presented by - Hadiya Ali - LecturerDocument10 pagesContext For HCI: - Presented by - Hadiya Ali - LecturerUltimate SmartWorldNo ratings yet
- Ortega 2015Document9 pagesOrtega 2015m.priyonoNo ratings yet
- 18 Cheng2009Document16 pages18 Cheng2009Rahul ShandilyaNo ratings yet
- Gupta 2016Document6 pagesGupta 2016jj PaniaguaNo ratings yet
- Computer Laboratory Time Monitoring System Capstone and Thesis DocumentationDocument4 pagesComputer Laboratory Time Monitoring System Capstone and Thesis DocumentationVampireNo ratings yet
- Week 6 CH 16 Distributed ProcessorsDocument8 pagesWeek 6 CH 16 Distributed ProcessorsAdnan Alam KhanNo ratings yet
- Automatic Stress Detection in Working enDocument9 pagesAutomatic Stress Detection in Working enMeartyNuzululIfriatriNo ratings yet
- The Growth of Cognitive Modeling in Human-Computer Interaction Since GOMSDocument53 pagesThe Growth of Cognitive Modeling in Human-Computer Interaction Since GOMSSkencNo ratings yet
- User Interface Golden RulesDocument5 pagesUser Interface Golden RulesarjNo ratings yet
- Ubiccjournalvolume2no3 2 28Document10 pagesUbiccjournalvolume2no3 2 28Usman TariqNo ratings yet
- Software Usability Evaluation Method: Piyush Jain, Sanjay Kumar Dubey, Prof. (DR.) Ajay RanaDocument6 pagesSoftware Usability Evaluation Method: Piyush Jain, Sanjay Kumar Dubey, Prof. (DR.) Ajay RanaIjarcet JournalNo ratings yet
- Recognizing User Context Using MobileDocument5 pagesRecognizing User Context Using MobileAshwin Kishor BangarNo ratings yet
- Process of An Existing Industrial Environment ChamberDocument6 pagesProcess of An Existing Industrial Environment ChamberJoshua MenesesNo ratings yet
- Paper 0469Document10 pagesPaper 0469namratabiswas245No ratings yet
- Understanding Situations in Map-Based ApplicationsDocument6 pagesUnderstanding Situations in Map-Based ApplicationsHua MingNo ratings yet
- A Home-Based Functional Hand-Extremity Assessment System For Stroke RehabilitationDocument2 pagesA Home-Based Functional Hand-Extremity Assessment System For Stroke Rehabilitationwijaya ajaaNo ratings yet
- A Plan-Based Self-Adaptive Intelligent EnvironmentDocument16 pagesA Plan-Based Self-Adaptive Intelligent Environmentel mehdi makNo ratings yet
- Human Centered Design For Nuclear Power Plant Control Room ModernizationDocument9 pagesHuman Centered Design For Nuclear Power Plant Control Room Modernizationcorina-pitestiNo ratings yet
- Hci RevisionDocument16 pagesHci RevisionJoshua MercyNo ratings yet
- Question (1) Discuss The Concept of Feasibility and AffordabilityDocument5 pagesQuestion (1) Discuss The Concept of Feasibility and AffordabilityhayerpaNo ratings yet
- TMP 2 DEEDocument13 pagesTMP 2 DEEFrontiersNo ratings yet
- Quantifying The Effectiveness of Alarm Management Systems Through Human Factors StudeisDocument12 pagesQuantifying The Effectiveness of Alarm Management Systems Through Human Factors StudeisBhavaNo ratings yet
- T Rosrojper1 1605255372 ROJANO PÉREZ 02Document150 pagesT Rosrojper1 1605255372 ROJANO PÉREZ 02Abel Julian Sosa VillamorNo ratings yet
- PV Hybrid System Sizing and Simulation Tools: Status and NeedsDocument10 pagesPV Hybrid System Sizing and Simulation Tools: Status and Needsel_ruso__83No ratings yet
- The Project and Its BackgroundDocument32 pagesThe Project and Its BackgroundJay Jay MendozaNo ratings yet
- MOSH-Chapter 8 (Human Machine System)Document20 pagesMOSH-Chapter 8 (Human Machine System)siti zubaidahNo ratings yet
- Human Problem-Solving ModelDocument3 pagesHuman Problem-Solving ModelEman ChanNo ratings yet
- Shubham Litreature ReviewDocument1 pageShubham Litreature ReviewshubhaMNo ratings yet
- ErgonomicsDocument7 pagesErgonomicsKhushi SalgaonkarNo ratings yet
- Gaze, Posture and Gesture Recognition To Minimize Focus Shifts For Intelligent Operating Rooms in A Collaborative Support SystemDocument20 pagesGaze, Posture and Gesture Recognition To Minimize Focus Shifts For Intelligent Operating Rooms in A Collaborative Support SystemJasi WachsNo ratings yet
- SystemsDocument33 pagesSystemsStuti Aggarwal 2K21/BBA/148No ratings yet
- Ergonomics Analysis of A Control Room OpDocument11 pagesErgonomics Analysis of A Control Room OpNur FajarNo ratings yet
- A Pervasive Approach For Intelligent Decision Support in Critical Health CareDocument1 pageA Pervasive Approach For Intelligent Decision Support in Critical Health CareSemana da Escola de Engenharia da Universidade do MinhoNo ratings yet
- Course: Climate Responsive Design (3672) Semester: Spring, 2020 Assignment - 1Document5 pagesCourse: Climate Responsive Design (3672) Semester: Spring, 2020 Assignment - 1adeel raziNo ratings yet
- Social Adaptation: When Software Gives Users A VoiceDocument10 pagesSocial Adaptation: When Software Gives Users A VoiceRaja SharmaNo ratings yet
- Chapter One 1.1 Background of The StudyDocument17 pagesChapter One 1.1 Background of The Studyosho risqatNo ratings yet
- Air Quality Prediction Using Linear RegressionDocument22 pagesAir Quality Prediction Using Linear RegressionMisba nausheenNo ratings yet
- It Mod 1-1Document13 pagesIt Mod 1-1SHARMIKA SINGHNo ratings yet
- Extending Rt-Minix With Fault Tolerance Capabilities: Pablo J. RoginaDocument8 pagesExtending Rt-Minix With Fault Tolerance Capabilities: Pablo J. RoginaGWNo ratings yet
- Ubiccjournalvolume2no3 2 28Document10 pagesUbiccjournalvolume2no3 2 28Ubiquitous Computing and Communication JournalNo ratings yet
- Human Factors / ErgonomicsDocument32 pagesHuman Factors / ErgonomicsCaturrNo ratings yet
- 6-Redacción Del EnsayoDocument6 pages6-Redacción Del Ensayojohana dominguezNo ratings yet
- 10 1109icbaps 2015 7292220 PDFDocument6 pages10 1109icbaps 2015 7292220 PDFnike 1998No ratings yet
- Aloha - Low Cost Hardware RobotDocument18 pagesAloha - Low Cost Hardware RobotBora CobanogluNo ratings yet
- Boeing Off The GridDocument30 pagesBoeing Off The GridBora CobanogluNo ratings yet
- Validity Domains of Beams Behavioural Models Efficiency and Reduction With Artificial Neural NetworksDocument8 pagesValidity Domains of Beams Behavioural Models Efficiency and Reduction With Artificial Neural NetworksBora CobanogluNo ratings yet
- Slide3 THE USE OF GEOPHYSICAL DATA IN THE EVALUATION OF LANDSLIDE 1Document30 pagesSlide3 THE USE OF GEOPHYSICAL DATA IN THE EVALUATION OF LANDSLIDE 1Bora CobanogluNo ratings yet
- BIM and Fire Safety Engineering - Overview of State of The ArtDocument13 pagesBIM and Fire Safety Engineering - Overview of State of The ArtBora CobanogluNo ratings yet
- Urban Network Analysis Toolbox For Rhinoceros 3D: Version 5.10.10.3 R5RS10Document30 pagesUrban Network Analysis Toolbox For Rhinoceros 3D: Version 5.10.10.3 R5RS10Bora CobanogluNo ratings yet
- Symmetric Self Play For Automatic Goal Dis Covery in Robotic ManipulationDocument21 pagesSymmetric Self Play For Automatic Goal Dis Covery in Robotic ManipulationBora CobanogluNo ratings yet
- Depth-Adapted CNN For RGB-D CamerasDocument17 pagesDepth-Adapted CNN For RGB-D CamerasBora CobanogluNo ratings yet
- Flow: A Modular Learning Framework For Mixed Autonomy TrafficDocument18 pagesFlow: A Modular Learning Framework For Mixed Autonomy TrafficBora CobanogluNo ratings yet
- Example:: Traffic Flow Levels of ServiceDocument2 pagesExample:: Traffic Flow Levels of ServiceBora CobanogluNo ratings yet
- Behaviorally Diverse Traffic Simulation Via Reinforcement LearningDocument8 pagesBehaviorally Diverse Traffic Simulation Via Reinforcement LearningBora CobanogluNo ratings yet
- Microscopic Traffic Simulation by Cooperative Multi-Agent Deep Reinforcement LearningDocument9 pagesMicroscopic Traffic Simulation by Cooperative Multi-Agent Deep Reinforcement LearningBora CobanogluNo ratings yet
- A Machine Learning Method For The Large-Scale Evaluation of Urban Visual EnvironmentDocument16 pagesA Machine Learning Method For The Large-Scale Evaluation of Urban Visual EnvironmentBora CobanogluNo ratings yet
- Smart Building Design: Brought To You by - Lund University Libraries Authenticated Download Date - 12/1/19 1:47 PMDocument58 pagesSmart Building Design: Brought To You by - Lund University Libraries Authenticated Download Date - 12/1/19 1:47 PMBora CobanogluNo ratings yet
- Depth Estimation From Single Image Using CNN-Residual NetworkDocument8 pagesDepth Estimation From Single Image Using CNN-Residual NetworkBora CobanogluNo ratings yet
- Smart Home Infrastructure Recommended GuidelinesDocument16 pagesSmart Home Infrastructure Recommended GuidelinesBora CobanogluNo ratings yet
- Artificial Intelligence in Architecture: Generating Conceptual Design Via Deep LearningDocument22 pagesArtificial Intelligence in Architecture: Generating Conceptual Design Via Deep LearningBora CobanogluNo ratings yet
- 2 Ijcse 08682Document15 pages2 Ijcse 08682Bora CobanogluNo ratings yet
- Beyond Visualization - Vivid Frameworks For Ubiquitous Sensor DataDocument4 pagesBeyond Visualization - Vivid Frameworks For Ubiquitous Sensor DataBora CobanogluNo ratings yet
- Monitored Data On Occupants' Presence and Actions in An Office BuildingDocument5 pagesMonitored Data On Occupants' Presence and Actions in An Office BuildingBora CobanogluNo ratings yet
- Data Science in Heavy Industry and The Internet of ThingsDocument16 pagesData Science in Heavy Industry and The Internet of ThingsBora CobanogluNo ratings yet
- Analyzing A Net Zero Energy Building (NZEB) in The Climate Zone of AustraliaDocument19 pagesAnalyzing A Net Zero Energy Building (NZEB) in The Climate Zone of AustraliaBora CobanogluNo ratings yet
- Superseded Section F Level LV and L1Document74 pagesSuperseded Section F Level LV and L1Bora CobanogluNo ratings yet
- Smart Building Design: Conception, Planning, Realization, and OperationDocument3 pagesSmart Building Design: Conception, Planning, Realization, and OperationBora CobanogluNo ratings yet
- Type ECI Stressing Anchorage: VSL Multistrand SystemsDocument1 pageType ECI Stressing Anchorage: VSL Multistrand SystemsBora CobanogluNo ratings yet
- A Stated Preference (SP) Study On Individuals' Transportation Decisions, Focused On Marmaray Project in ØstanbulDocument8 pagesA Stated Preference (SP) Study On Individuals' Transportation Decisions, Focused On Marmaray Project in ØstanbulBora CobanogluNo ratings yet
- Brochure ILF Tunnel Ventilation enDocument12 pagesBrochure ILF Tunnel Ventilation enBora CobanogluNo ratings yet
- Vol - CXXV-No .184Document44 pagesVol - CXXV-No .184Sonu DeogunNo ratings yet
- Completed Project AjiDocument31 pagesCompleted Project AjiFawaz AzadNo ratings yet
- Honey Python TestingDocument2 pagesHoney Python Testinger.honeyraj2016No ratings yet
- Ui PATH - RE FRAMEWORKDocument2 pagesUi PATH - RE FRAMEWORKsaubhagya ranjan mohapatraNo ratings yet
- Paul Quennon HaikusDocument155 pagesPaul Quennon HaikusDiogo MizaelNo ratings yet
- Robert BurnsDocument4 pagesRobert BurnsMilana SavicNo ratings yet
- 2010 Skema Pat SBPDocument17 pages2010 Skema Pat SBPAfiqah RoshidiNo ratings yet
- Panasonic TVP200 Installation ManualDocument380 pagesPanasonic TVP200 Installation Manualrdmaclean100% (2)
- Automated Sand Gravity Sand Filter SystemDocument58 pagesAutomated Sand Gravity Sand Filter SystemMichaelNo ratings yet
- Literature Review and Case StudyDocument4 pagesLiterature Review and Case StudyNimNo ratings yet
- Adani Enterprises Limited: Financial Statement AnalysisDocument44 pagesAdani Enterprises Limited: Financial Statement AnalysisAyush FuseNo ratings yet
- Food and DrinkDocument5 pagesFood and DrinkHec Al-HusnaNo ratings yet
- Lecture3 PDFDocument12 pagesLecture3 PDFYogi AldinoNo ratings yet
- Filariasis: Dr. Saida SharminDocument35 pagesFilariasis: Dr. Saida SharminBishwajit BhattacharjeeNo ratings yet
- CV Fire Catalog PDFDocument112 pagesCV Fire Catalog PDFArul SankaranNo ratings yet
- Weather Proof LouvreDocument6 pagesWeather Proof Louvrentt_121987No ratings yet
- Imagining Persons Robert Duncans Lectures On Charles Olson (Robert Duncan) (Z-Library)Document265 pagesImagining Persons Robert Duncans Lectures On Charles Olson (Robert Duncan) (Z-Library)markNo ratings yet
- The IMA Volumes in Mathematics and Its Applications: Avner Friedman Willard Miller, JRDocument172 pagesThe IMA Volumes in Mathematics and Its Applications: Avner Friedman Willard Miller, JRPedro PereyraNo ratings yet
- Degree ExercisesDocument3 pagesDegree ExercisesArjit Kapoor100% (1)
- LSPU Self-Paced Learning Module (SLM) : CalculusDocument88 pagesLSPU Self-Paced Learning Module (SLM) : CalculusDharwyn Avy Advento CalmaNo ratings yet
- Golf Ball Paper Final DraftDocument18 pagesGolf Ball Paper Final DraftSiva RajNo ratings yet
- 02 - Catalogue - ENDocument27 pages02 - Catalogue - ENAlejandro SiavisnomNo ratings yet
- ECE-Class TT 21-22 EVEN-28.01.22Document13 pagesECE-Class TT 21-22 EVEN-28.01.22Sivakumar PothirajNo ratings yet
- (GHS SDS-en) - TAT - SOL-32 - 201901Document5 pages(GHS SDS-en) - TAT - SOL-32 - 201901Ian PrabowoNo ratings yet