You might also like
- Paper 3A3 The Equations of Fluid Flow and Their Numerical SolutionDocument30 pagesPaper 3A3 The Equations of Fluid Flow and Their Numerical SolutionHelmut Soehn100% (1)
- Technology For Chemical Cleaning of Industrial EquipmentDocument167 pagesTechnology For Chemical Cleaning of Industrial EquipmentSachikanta Pradhan67% (6)
- BS EN 61439-2 LV SwitchgearDocument30 pagesBS EN 61439-2 LV SwitchgearMichael Camit EsoNo ratings yet
- SeamanshipDocument23 pagesSeamanshipC T UNNIKRISHNAN NAIRNo ratings yet
- Prescriptive AnalyticsDocument7 pagesPrescriptive AnalyticsAlfredo Romero GNo ratings yet
- New Obiee 11gDocument287 pagesNew Obiee 11gVijayabhaskarareddy VemireddyNo ratings yet
- Supported by The Austrian Science Fund (FWF) Under Grant SFB F32 "Mathematical Optimization and Applications in Biomedical Sciences"Document4 pagesSupported by The Austrian Science Fund (FWF) Under Grant SFB F32 "Mathematical Optimization and Applications in Biomedical Sciences"Yacer Hadadi RadwanNo ratings yet
- Practical Solution of Partial Differential Equations in Finance PDFDocument27 pagesPractical Solution of Partial Differential Equations in Finance PDFyuzukiebaNo ratings yet
- KadaneDocument15 pagesKadaneTARIK EL BARAKYNo ratings yet
- Exam - Time Series AnalysisDocument8 pagesExam - Time Series AnalysisSheehan Dominic HanrahanNo ratings yet
- Ee-522: Lecture-6: Event-Driven Schedulers-Ii Quick Review of Gpios and InterruptsDocument27 pagesEe-522: Lecture-6: Event-Driven Schedulers-Ii Quick Review of Gpios and Interruptsjunaid ahmadNo ratings yet
- Lec 2 - Module 2Document116 pagesLec 2 - Module 2vopoc21212No ratings yet
- Argonne National Laboratory 9700 South Cass Avenue Argonne, Illinois 60439Document57 pagesArgonne National Laboratory 9700 South Cass Avenue Argonne, Illinois 60439putririzkiahNo ratings yet
- Solving The 2-Disjoint Connected Subgraphs Problem Faster Than 2Document13 pagesSolving The 2-Disjoint Connected Subgraphs Problem Faster Than 2shashank guptaNo ratings yet
- CSE-205 Algorithms: Algorithm, Asymptotic Notation & Complexity AnalysisDocument43 pagesCSE-205 Algorithms: Algorithm, Asymptotic Notation & Complexity AnalysisMD.ASHADUZZAMAN AyonNo ratings yet
- Fea HandoutsDocument51 pagesFea HandoutsDr.A.Maniram KumarNo ratings yet
- This Content Downloaded From 140.112.26.187 On Mon, 10 Apr 2023 09:29:57 UTCDocument31 pagesThis Content Downloaded From 140.112.26.187 On Mon, 10 Apr 2023 09:29:57 UTCNothing ConnoisseurNo ratings yet
- Ecd202 Lec09 2023Document18 pagesEcd202 Lec09 2023Joshua ChikaratiNo ratings yet
- Curvilinear Mesh AdaptationDocument15 pagesCurvilinear Mesh AdaptationGogyNo ratings yet
- Mathematical Preliminaries: 1.2 Roundoff Errors and Computer ArithmeticDocument16 pagesMathematical Preliminaries: 1.2 Roundoff Errors and Computer ArithmeticguyNo ratings yet
- Performance Analysis Tools Applied To A Finite Adaptive Mesh Free Boundary Seepage Parallel AlgorithmDocument62 pagesPerformance Analysis Tools Applied To A Finite Adaptive Mesh Free Boundary Seepage Parallel AlgorithmSalam FaithNo ratings yet
- 2D Cellular AutomataDocument24 pages2D Cellular AutomataraskhyNo ratings yet
- Crack Modelling Using Zero-Thickness Interface ElementsDocument33 pagesCrack Modelling Using Zero-Thickness Interface Elementsyong yangNo ratings yet
- MIT6 006F11 Lec01 PDFDocument6 pagesMIT6 006F11 Lec01 PDFAnjali GhoshNo ratings yet
- Method of FEMDocument27 pagesMethod of FEMVedansh SinghNo ratings yet
- High-Efficiency and Low-Power Architectures For 2-D DCT and IDCT Based On CORDIC RotationDocument6 pagesHigh-Efficiency and Low-Power Architectures For 2-D DCT and IDCT Based On CORDIC RotationGopinathan MuthusamyNo ratings yet
- Lecture 4 - FD Analysis of Anisotropic Transmission LinesDocument20 pagesLecture 4 - FD Analysis of Anisotropic Transmission Linesjesus1843No ratings yet
- Finitepoint2D: A Meshless Gid Code For Linear Elasticity Enrique Escolano and Franco PerazzoDocument4 pagesFinitepoint2D: A Meshless Gid Code For Linear Elasticity Enrique Escolano and Franco PerazzoUrva TailorNo ratings yet
- Procesamiento Digital de Se Nales: Rodolfo GordilloDocument23 pagesProcesamiento Digital de Se Nales: Rodolfo GordilloJavier TutilloNo ratings yet
- Computers and Mathematics With Applications: Dinh Nho Hào, Phan Xuan Thanh, Bandar Bin-Mohsin, Nguyen Huu CongDocument18 pagesComputers and Mathematics With Applications: Dinh Nho Hào, Phan Xuan Thanh, Bandar Bin-Mohsin, Nguyen Huu CongNguyễn Quang HuyNo ratings yet
- Estimating Surface Normals in Noisy Point Cloud Data: Niloy J. Mitra, An NguyenDocument36 pagesEstimating Surface Normals in Noisy Point Cloud Data: Niloy J. Mitra, An NguyenJaya MuthuvelNo ratings yet
- EECS 16B Summer 2020 Midterm 2 (Form 1) : InstructionsDocument16 pagesEECS 16B Summer 2020 Midterm 2 (Form 1) : InstructionsJohn CrankstonNo ratings yet
- Differentiable Quantization of Deep Neural Networks: Equal ContributionDocument21 pagesDifferentiable Quantization of Deep Neural Networks: Equal ContributionganeshNo ratings yet
- CasadiDocument1 pageCasadiRAHMANI NASR-EDDINENo ratings yet
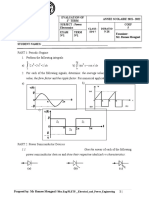
- DX B) X Cos X DX: Class: Eps 7 Duratio N2HDocument2 pagesDX B) X Cos X DX: Class: Eps 7 Duratio N2HRomeo MougnolNo ratings yet
- Tac 2006 875019Document5 pagesTac 2006 875019Bá Linh NguyễnNo ratings yet
- Econometrics 2 Aflevering 2 New RevideretDocument13 pagesEconometrics 2 Aflevering 2 New RevideretJonathan AndersenNo ratings yet
- Predictive Coding For Locally-Linear ControlDocument10 pagesPredictive Coding For Locally-Linear ControlThế Anh NguyễnNo ratings yet
- Up 24654 1076487923Document17 pagesUp 24654 1076487923Guivis ZeufackNo ratings yet
- (Main) : Computer Based Test (CBT)Document49 pages(Main) : Computer Based Test (CBT)M KalpanaNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document7 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- NLO NotesDocument75 pagesNLO NotesVanessa RomeroNo ratings yet
- GUI Program For 2D-Truss Analysis: Developed in MATLAB 7.0Document13 pagesGUI Program For 2D-Truss Analysis: Developed in MATLAB 7.0Fabiola GiNo ratings yet
- Assignment ModelDocument8 pagesAssignment ModelAMIYA KUMAR SAMALNo ratings yet
- Grinfeldstrang-Eigenvalues On PolygonsDocument15 pagesGrinfeldstrang-Eigenvalues On Polygonslogsdad291No ratings yet
- Scaman17a SuppDocument3 pagesScaman17a SuppzeSky ArmourNo ratings yet
- Parallel MACDocument6 pagesParallel MACSeuneedhi SinghNo ratings yet
- Inverse Kinematics Solution of 3DOF Planar Robot Using ANFISDocument7 pagesInverse Kinematics Solution of 3DOF Planar Robot Using ANFISasasNo ratings yet
- EC004 OutputDynamics - Microfoundation 2022 Lecture5Document21 pagesEC004 OutputDynamics - Microfoundation 2022 Lecture5Titu SinghNo ratings yet
- Assignment Math2-FinalDocument3 pagesAssignment Math2-FinalIbrahim MusaNo ratings yet
- Basic Automatic Control: March 18, 2014 Academic Year 2013/14Document5 pagesBasic Automatic Control: March 18, 2014 Academic Year 2013/14Lau Siong KwongNo ratings yet
- IQ Imbalance Estimation and Compensation in Receiver System: November 2019Document6 pagesIQ Imbalance Estimation and Compensation in Receiver System: November 2019Nam TàoNo ratings yet
- Discrete Fractional Sobolev Norms For Domain Decomposition PreconditioningDocument25 pagesDiscrete Fractional Sobolev Norms For Domain Decomposition Preconditioningshihomasami14No ratings yet
- Lecture 12Document20 pagesLecture 12ankiosaNo ratings yet
- An Overview of Machine LearningDocument42 pagesAn Overview of Machine LearningMaitreyee PalNo ratings yet
- Intro To Finite Element Modeling and COMSOLDocument18 pagesIntro To Finite Element Modeling and COMSOLSCR_010101No ratings yet
- JNTUA - B Tech - 2018 - 3 2 - Dec - R15 - EEE - 15A02606 OPTIMIZATION TECHNIQUESDocument2 pagesJNTUA - B Tech - 2018 - 3 2 - Dec - R15 - EEE - 15A02606 OPTIMIZATION TECHNIQUESVinay ChinthaNo ratings yet
- Monotonicity Mamdani-Assilian Models: On The of With Two Input VariablesDocument6 pagesMonotonicity Mamdani-Assilian Models: On The of With Two Input VariablesSAAYAANTAAN NITNo ratings yet
- Optimal-Power-Flow-Report by Debasish ChoudhuryDocument29 pagesOptimal-Power-Flow-Report by Debasish ChoudhuryDebasish ChoudhuryNo ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument18 pages16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNo ratings yet
- EL2620 Nonlinear Control Today's GoalDocument9 pagesEL2620 Nonlinear Control Today's GoalAbdesselem BoulkrouneNo ratings yet
- Lecture Notes For Chapter 4 Artificial Neural Networks: Data MiningDocument25 pagesLecture Notes For Chapter 4 Artificial Neural Networks: Data MiningIshwar MhtNo ratings yet
- Khan-Munir2019 Article ANovelImageEncryptionTechniqueDocument19 pagesKhan-Munir2019 Article ANovelImageEncryptionTechniqueMajid KhanNo ratings yet
- Technical Information ASSET DOC LOC 1544930 PDFDocument73 pagesTechnical Information ASSET DOC LOC 1544930 PDFkmh33403No ratings yet
- Examination-Schedule BE-Arch-BCA-B.Sc .Env - Fall-2023 AllDocument4 pagesExamination-Schedule BE-Arch-BCA-B.Sc .Env - Fall-2023 Allsandhyakhadka909No ratings yet
- (IJCST-V6I6P22) :prof. Sudhir Morey, Prof. Sangpal SarkateDocument7 pages(IJCST-V6I6P22) :prof. Sudhir Morey, Prof. Sangpal SarkateEighthSenseGroupNo ratings yet
- Home Automation Using Hand GestureDocument19 pagesHome Automation Using Hand GestureChandrashekhar KatagiNo ratings yet
- WB 350Document27 pagesWB 350dionisio emilio reyes jimenezNo ratings yet
- Anaerobic RespirationDocument3 pagesAnaerobic RespirationPRINTDESK by DanNo ratings yet
- MTech QROR PQB 2019Document13 pagesMTech QROR PQB 2019DHIRAJ DILLEP S NAIRNo ratings yet
- 2140705Document3 pages21407059922116408No ratings yet
- Prolog, 2015, ExercitiiDocument3 pagesProlog, 2015, ExercitiiNick Y VladiceanuNo ratings yet
- ECE 6100 Project 3: Implementation of Cache Coherence ProtocolsDocument6 pagesECE 6100 Project 3: Implementation of Cache Coherence ProtocolsShantanu KotkarNo ratings yet
- Test Power 1Document3 pagesTest Power 1Aliff HaikalNo ratings yet
- PAHS 306: Session 5 - Simple CorrelationDocument14 pagesPAHS 306: Session 5 - Simple CorrelationSuhuyini GaribugliNo ratings yet
- M80 Motor Data Sheet - Rizel AutomotiveDocument1 pageM80 Motor Data Sheet - Rizel AutomotiveVarun Thana shekarNo ratings yet
- MD 2 FinalsDocument43 pagesMD 2 FinalsRea RebenqueNo ratings yet
- Countable and Uncountable Nouns 2013 PDFDocument2 pagesCountable and Uncountable Nouns 2013 PDFcajoca1No ratings yet
- Answer StepExercise Min EOLDocument2 pagesAnswer StepExercise Min EOLKamal SaravananNo ratings yet
- MTRP 2016 - 9Document3 pagesMTRP 2016 - 9Nimai Roy100% (1)
- SMC4-4-16A16B Four-Axis Motion Controller Instruction ManualDocument14 pagesSMC4-4-16A16B Four-Axis Motion Controller Instruction ManuallucaNo ratings yet
- Hosteck FolhpromocionalDocument64 pagesHosteck FolhpromocionalYury LorenzNo ratings yet
- Descriptive ResearchDocument5 pagesDescriptive Researchnagire_9100% (1)
- Missay Lesson Plan in Mathematics Guide For Your Lesson Plan Incase of NothingDocument9 pagesMissay Lesson Plan in Mathematics Guide For Your Lesson Plan Incase of Nothingangel shopNo ratings yet
- JNTU Old Question Papers 2007Document8 pagesJNTU Old Question Papers 2007Srinivasa Rao G94% (18)
- Pre Half Yearly STD X MathsDocument6 pagesPre Half Yearly STD X MathsnaeblahblahNo ratings yet
- Math - Q3 - Module 4 - Triangle Congruence (AutoRecovered)Document8 pagesMath - Q3 - Module 4 - Triangle Congruence (AutoRecovered)Jubie Ann EspenillaNo ratings yet
- Chapter1 GeneralIntroductiontoPLCDocument44 pagesChapter1 GeneralIntroductiontoPLCBùi Văn XêNo ratings yet