You might also like
- Satellite Image Segmenation and Classification For Environmental AnalysisDocument8 pagesSatellite Image Segmenation and Classification For Environmental AnalysisIJRASETPublicationsNo ratings yet
- LIDAR TechnologyDocument9 pagesLIDAR TechnologyIJRASETPublicationsNo ratings yet
- Interferometric Synthetic Aperture Radar and RadargrammetryDocument239 pagesInterferometric Synthetic Aperture Radar and RadargrammetryvrixscribdNo ratings yet
- 13 Yathunathan Et Al ASEGDocument5 pages13 Yathunathan Et Al ASEGGalang FahmiNo ratings yet
- Remotesensing 14 04220Document36 pagesRemotesensing 14 04220BENNANI MUSTAPHA1No ratings yet
- 1 s2.0 S0034425717306193 MainDocument26 pages1 s2.0 S0034425717306193 MainLeoNo ratings yet
- Kussul Et Al 2017 GRSL DeepLearningDocument6 pagesKussul Et Al 2017 GRSL DeepLearninghelmi storeNo ratings yet
- SMPR2019 Paper Seydi Rastiveis ISPRSDocument8 pagesSMPR2019 Paper Seydi Rastiveis ISPRSJohn CoucNo ratings yet
- Isprs Archives XLIV M 3 2021 105 2021Document7 pagesIsprs Archives XLIV M 3 2021 105 2021Theeraruk ManeenartNo ratings yet
- Digitizingthe Forest Resource Map Using Arc GISDocument8 pagesDigitizingthe Forest Resource Map Using Arc GISNisNo ratings yet
- Optimum Route Planning of A City Using Gis Technology: April 2019Document12 pagesOptimum Route Planning of A City Using Gis Technology: April 2019Reynaldo AldamarNo ratings yet
- Ijgi 10 00332 With CoverDocument17 pagesIjgi 10 00332 With CoverOmatoukNo ratings yet
- Landslide Risk Analysis Using Artificial Neural Ne PDFDocument16 pagesLandslide Risk Analysis Using Artificial Neural Ne PDFBambang SiswantoNo ratings yet
- Aman, Murtaza Khan, Khurshid - 2018 - Comparative Analysis of Different Methodologies For Local Climate Zone ClassificationDocument11 pagesAman, Murtaza Khan, Khurshid - 2018 - Comparative Analysis of Different Methodologies For Local Climate Zone ClassificationHiền MaiNo ratings yet
- Change Detection From Remotely Sensed Images - From Pixel-Based To Object-Based ApproachesDocument16 pagesChange Detection From Remotely Sensed Images - From Pixel-Based To Object-Based ApproachesAlinutza StancescuNo ratings yet
- Deep Learning UAV ReviewDocument21 pagesDeep Learning UAV ReviewAlexandre AlbuquerqueNo ratings yet
- Applsci 12 06387 With CoverDocument36 pagesApplsci 12 06387 With Coversid202pkNo ratings yet
- Kussul Et Al 2017 GRSL DeepLearningDocument6 pagesKussul Et Al 2017 GRSL DeepLearningManish MeenaNo ratings yet
- Accuracy Assessment of Land Use/Land Cover Classification Using Remote Sensing and GISDocument13 pagesAccuracy Assessment of Land Use/Land Cover Classification Using Remote Sensing and GISNgọc PhanNo ratings yet
- Remote SensingDocument17 pagesRemote Sensingsaran kumar100% (1)
- Artificial Intelligence and Data Analytics For Geosciences and Remote Sensing: Theory and ApplicationDocument28 pagesArtificial Intelligence and Data Analytics For Geosciences and Remote Sensing: Theory and Applicationmohamed boumehdiNo ratings yet
- Sadeghvaziri Et. Al., 2016 - Comprehensive Review of Travel Behavior and Mobility Pattern Studies That Used Mobile Phone DataDocument10 pagesSadeghvaziri Et. Al., 2016 - Comprehensive Review of Travel Behavior and Mobility Pattern Studies That Used Mobile Phone DataWilliam LindgreenNo ratings yet
- 1-s2.0-S0263224117301847 Highway-MainDocument10 pages1-s2.0-S0263224117301847 Highway-MainRinno Iqsyam PriyanantaNo ratings yet
- Remote SensingDocument29 pagesRemote SensingAfiat KhanNo ratings yet
- Evaluating Pixel-Based Vs Object-Based Image AnalyDocument17 pagesEvaluating Pixel-Based Vs Object-Based Image AnalyAugustoSuárezNo ratings yet
- Automated Extraction of Road Features Using Lidar Data: A Review of Lidar Applications in TransportationDocument12 pagesAutomated Extraction of Road Features Using Lidar Data: A Review of Lidar Applications in TransportationJohn CoucNo ratings yet
- ConvertWebPage WebPageDocument19 pagesConvertWebPage WebPagekNo ratings yet
- Project2 Part-1Document50 pagesProject2 Part-1Madhukalyan ChodisettyNo ratings yet
- Understanding Synthetic Aperture Radar Images: SciteghDocument15 pagesUnderstanding Synthetic Aperture Radar Images: SciteghBăh ŢăraneeNo ratings yet
- Understanding Synthetic Aperture Radar Images PDFDocument522 pagesUnderstanding Synthetic Aperture Radar Images PDFGaurav Singh100% (1)
- (IJCST-V10I4P18) :fatima Ibrahim Abdelmoutalib, Dieter FritschDocument10 pages(IJCST-V10I4P18) :fatima Ibrahim Abdelmoutalib, Dieter FritschEighthSenseGroupNo ratings yet
- Lidar Technology (Hard Copy)Document15 pagesLidar Technology (Hard Copy)Trupti ParidaNo ratings yet
- 3 Isroset Ijsrms 05656Document9 pages3 Isroset Ijsrms 05656Hedi HNo ratings yet
- Geo-Information: Tracking 3D Moving Objects Based On GPS/IMU Navigation Solution, Laser Scanner Point Cloud and GIS DataDocument16 pagesGeo-Information: Tracking 3D Moving Objects Based On GPS/IMU Navigation Solution, Laser Scanner Point Cloud and GIS DataGopi Krishna ValluriNo ratings yet
- SSRN Id4373987Document32 pagesSSRN Id4373987sibille.bayon.de.noyerNo ratings yet
- Sensors 18 02484Document22 pagesSensors 18 02484Martella PeronoNo ratings yet
- 1517203853LIDARbasicprincipleandapplications (1Document20 pages1517203853LIDARbasicprincipleandapplications (1sg.gis279No ratings yet
- A Survey On Visual Analysis of Ocean DataDocument16 pagesA Survey On Visual Analysis of Ocean DataAnu ParameswaranNo ratings yet
- GIS Past Paper ExamsDocument11 pagesGIS Past Paper ExamsShoturu100% (4)
- LiDAR Mapping A Remote Sensing TechnologyDocument3 pagesLiDAR Mapping A Remote Sensing Technologyvishwas sNo ratings yet
- Pplications OF Emote Ensing: Kaushik K. Shandilya, Sheo Prasad Shukla and Virendra PathakDocument12 pagesPplications OF Emote Ensing: Kaushik K. Shandilya, Sheo Prasad Shukla and Virendra Pathakyuan yoyoNo ratings yet
- Remote Sensing (RS) and GIS Research Paper R2Document7 pagesRemote Sensing (RS) and GIS Research Paper R2jamesbondmsd07No ratings yet
- Assessment of Vertical Accuracy From UAV-LiDAR and Structure FromDocument85 pagesAssessment of Vertical Accuracy From UAV-LiDAR and Structure FromTheeraruk ManeenartNo ratings yet
- Remote SensingDocument21 pagesRemote SensingMathan KumarNo ratings yet
- Automated Lineament Extraction Applied To High-Resolution Imagery Worldview-3 and LiDAR Data For Pegmatite Mineral ExplorationDocument10 pagesAutomated Lineament Extraction Applied To High-Resolution Imagery Worldview-3 and LiDAR Data For Pegmatite Mineral ExplorationDouglas SantosNo ratings yet
- Deep Learning Method of Landslide Inventory Map With Imbalanced Samples in Optical Remote SensingDocument17 pagesDeep Learning Method of Landslide Inventory Map With Imbalanced Samples in Optical Remote Sensingnicolascabellos99No ratings yet
- Comprehensive Airborne Laser Scanning (ALS) SimulationDocument20 pagesComprehensive Airborne Laser Scanning (ALS) SimulationANo ratings yet
- 015 Reef-Insight A Framework For ReefDocument17 pages015 Reef-Insight A Framework For ReefVINESSE JUMAWIDNo ratings yet
- Accuracy Assessment of Supervised Classification MDocument14 pagesAccuracy Assessment of Supervised Classification Mabraham admassieNo ratings yet
- Thesis Corrected 28sep06 J E 1 CutePdfDocument196 pagesThesis Corrected 28sep06 J E 1 CutePdfA. D. PrasadNo ratings yet
- RS GIS 18CV651 Notes MODULE 1Document13 pagesRS GIS 18CV651 Notes MODULE 1Brundaja D NNo ratings yet
- An Algorithm For Automatic Detection and Orientation Estim 2016 ComputersDocument9 pagesAn Algorithm For Automatic Detection and Orientation Estim 2016 ComputersAnurag PawarNo ratings yet
- Uav Ugv 1Document20 pagesUav Ugv 1Mauricio DIAZNo ratings yet
- DesignofRailwayalignment 2Document6 pagesDesignofRailwayalignment 2shymaa elbakryNo ratings yet
- State Exam QDocument71 pagesState Exam QAngie LoayzaNo ratings yet
- Is Arc 2013 Paper 220Document11 pagesIs Arc 2013 Paper 220IamEm B. MoNo ratings yet
- Remotesensing 14 03855 PDFDocument31 pagesRemotesensing 14 03855 PDFShekhar TomarNo ratings yet
- Course Brochure-1Document2 pagesCourse Brochure-1manohar manuNo ratings yet
- Robust Estimation of Landslide Displacement From Multitemporal UAV Photogrammetry-Derived Point CloudsDocument15 pagesRobust Estimation of Landslide Displacement From Multitemporal UAV Photogrammetry-Derived Point Cloudssha istaNo ratings yet
- Geography NotesDocument13 pagesGeography Notessomnathmandal89No ratings yet
- Resolution: Submitted by Somnath Mandal Batch-9Document8 pagesResolution: Submitted by Somnath Mandal Batch-9somnathmandal89No ratings yet
- Lidar Exam PreparationDocument8 pagesLidar Exam Preparationsomnathmandal89100% (1)
- TR302Document256 pagesTR302somnathmandal89No ratings yet
- Q1. What Is Orbit?Document9 pagesQ1. What Is Orbit?somnathmandal89No ratings yet
- Advanced Lidar Data Processing With LastoolsDocument6 pagesAdvanced Lidar Data Processing With Lastoolssomnathmandal89No ratings yet
- Report of Bandel Thermal Power PlantsDocument1 pageReport of Bandel Thermal Power Plantssomnathmandal89No ratings yet
- Thermal Power PlantDocument1 pageThermal Power Plantsomnathmandal89No ratings yet
- Friend and FamilyDocument1 pageFriend and Familysomnathmandal89No ratings yet
- History of Development of TppsDocument2 pagesHistory of Development of Tppssomnathmandal89No ratings yet
- FNCPDocument3 pagesFNCPDarcey NicholeNo ratings yet
- Research ProposalDocument2 pagesResearch ProposalAnika AroviNo ratings yet
- DSS+ SH Risk Management HandbookDocument20 pagesDSS+ SH Risk Management HandbookAlan PicazzoNo ratings yet
- Seasons and WeatherDocument2 pagesSeasons and WeatherОлінька СтецюкNo ratings yet
- Various Executions MA: Series Foodstuffs ExecutionDocument17 pagesVarious Executions MA: Series Foodstuffs ExecutionKyriakos MichalakiNo ratings yet
- MonoSLAM Real-Time Single Camera SLAMDocument16 pagesMonoSLAM Real-Time Single Camera SLAMArmandoNo ratings yet
- ECC Strategic Plan BookletDocument20 pagesECC Strategic Plan BookletAida MohammedNo ratings yet
- Ancient AstronomyDocument26 pagesAncient AstronomyRodel RamosNo ratings yet
- Genomic and CDNA LibrariesDocument15 pagesGenomic and CDNA LibrariesPrabhleen KaurNo ratings yet
- Ficha Tecnica: KN 95 (Non - Medical)Document13 pagesFicha Tecnica: KN 95 (Non - Medical)Luis Buitrón RamírezNo ratings yet
- Intro To Bifurcation TheoryDocument47 pagesIntro To Bifurcation TheoryJohn StarrettNo ratings yet
- Filtergehà Use - Beutel Und - Kerzen - enDocument5 pagesFiltergehà Use - Beutel Und - Kerzen - ennabila OktavianiNo ratings yet
- SM52 PDFDocument28 pagesSM52 PDFtaqigata75% (4)
- Generative NLP Robert Dilts PDFDocument11 pagesGenerative NLP Robert Dilts PDFCristina LorinczNo ratings yet
- FS 2 - Learning Episode 4-7Document3 pagesFS 2 - Learning Episode 4-7dave puertollanoNo ratings yet
- Exp 3 Rahul Singh 2k20-A18-12Document8 pagesExp 3 Rahul Singh 2k20-A18-12Dummy Account-Rahul SinghNo ratings yet
- CTS Company Profile Rev0Document11 pagesCTS Company Profile Rev0khalesnabilNo ratings yet
- Gravity Distribution Systems: A System Design and ConstructionDocument40 pagesGravity Distribution Systems: A System Design and ConstructionTooma DavidNo ratings yet
- Jadual Waktu Pengajaran Fizikperubatan 2020-2021Document3 pagesJadual Waktu Pengajaran Fizikperubatan 2020-2021hrtnrnnyNo ratings yet
- Career Guidance WorksheetDocument2 pagesCareer Guidance WorksheetSitti Rohima MarajanNo ratings yet
- Frequency Distribution NewDocument18 pagesFrequency Distribution NewRishab Jain 2027203No ratings yet
- 302 Decision Science Question - PaperDocument3 pages302 Decision Science Question - Paperajay taleNo ratings yet
- INCOMPATIBILITIESDocument27 pagesINCOMPATIBILITIESArk Olfato Parojinog100% (1)
- (J. García-Prada) Methodology To Characterize The Von Misses Stress in The Contact Between Wheel and Rail (Test-Rig)Document5 pages(J. García-Prada) Methodology To Characterize The Von Misses Stress in The Contact Between Wheel and Rail (Test-Rig)luigi12244No ratings yet
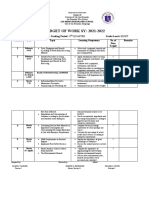
- BUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3Document2 pagesBUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3michelle dayritNo ratings yet
- The 4 Hour Work SummaryDocument6 pagesThe 4 Hour Work SummaryhgfhgNo ratings yet
- TanDocument8 pagesTanShourya RathodNo ratings yet
- Computed Radiography 1Document38 pagesComputed Radiography 1Charisa Antonette HuelvaNo ratings yet
- Illness Narratives - Positioned IdentitiesDocument35 pagesIllness Narratives - Positioned IdentitiesAnaNo ratings yet
- R.M. M, J. C, S.L. I S.M. H R C. M P J. M G : Aier Horover Verson AND Ayes Odney Aier and Eter C OldrickDocument1 pageR.M. M, J. C, S.L. I S.M. H R C. M P J. M G : Aier Horover Verson AND Ayes Odney Aier and Eter C OldrickPeter McGoldrickNo ratings yet