You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- EX380 Operator Maint ManualDocument35 pagesEX380 Operator Maint ManualChandra Sekar50% (2)
- BFH Pinout Spreadsheet v2Document4 pagesBFH Pinout Spreadsheet v2adrianNo ratings yet
- K&H - Em-3000Document9 pagesK&H - Em-3000waleed.murad@gmail.comNo ratings yet
- For DUMMIES - STT All VersionsDocument54 pagesFor DUMMIES - STT All VersionsChristian J. GonzálezNo ratings yet
- Advances in Unmanned Underwater Vehicles TechnologDocument15 pagesAdvances in Unmanned Underwater Vehicles TechnologBurak PalaNo ratings yet
- Preliminary Design of Underwater Unmanned Vehicle Integrated System EvaluationDocument6 pagesPreliminary Design of Underwater Unmanned Vehicle Integrated System EvaluationBurak PalaNo ratings yet
- Design and Control of Unmanned Underwater Vehicle: January 2019Document8 pagesDesign and Control of Unmanned Underwater Vehicle: January 2019Burak PalaNo ratings yet
- Design of Low-Cost Unmanned Underwater Vehicle For Shallow WatersDocument13 pagesDesign of Low-Cost Unmanned Underwater Vehicle For Shallow WatersBurak PalaNo ratings yet
- United States Patent: Wasserman (10) Patent No .: US 10,794,618 B2 (45) Date of PatentDocument19 pagesUnited States Patent: Wasserman (10) Patent No .: US 10,794,618 B2 (45) Date of PatentBurak PalaNo ratings yet
- United States Patent: Chang Et Al. (10) Patent No.: US 8,026,567 B2Document6 pagesUnited States Patent: Chang Et Al. (10) Patent No.: US 8,026,567 B2Burak PalaNo ratings yet
- United States Patent: Nagyetal. (45) Date of Patent: Oct. 20, 2020Document11 pagesUnited States Patent: Nagyetal. (45) Date of Patent: Oct. 20, 2020Burak PalaNo ratings yet
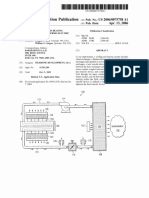
- Patent Application Publication (10) Pub. No.: US 2006/0075758A1Document7 pagesPatent Application Publication (10) Pub. No.: US 2006/0075758A1Burak PalaNo ratings yet
- United States Patent (10) Patent No.: US 6,293,107 B1: Kitagawa Et Al. (45) Date of Patent: Sep. 25, 2001Document19 pagesUnited States Patent (10) Patent No.: US 6,293,107 B1: Kitagawa Et Al. (45) Date of Patent: Sep. 25, 2001Burak PalaNo ratings yet
- Thermoelectric Cooling of Heat-Loaded Electronics: E. N. Vasil'evDocument9 pagesThermoelectric Cooling of Heat-Loaded Electronics: E. N. Vasil'evBurak PalaNo ratings yet
- United States Patent (19) 11 Patent Number: 5,862,669: Davis Et Al. (45) Date of Patent: Jan. 26, 1999Document26 pagesUnited States Patent (19) 11 Patent Number: 5,862,669: Davis Et Al. (45) Date of Patent: Jan. 26, 1999Burak PalaNo ratings yet
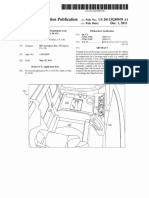
- Patent Application Publication (10) Pub. No.: US 2011/0289939 A1Document16 pagesPatent Application Publication (10) Pub. No.: US 2011/0289939 A1Burak PalaNo ratings yet
- Thermoelectric Power Generation: Converting Low-Grade Heat Into ElectricityDocument3 pagesThermoelectric Power Generation: Converting Low-Grade Heat Into ElectricityBurak PalaNo ratings yet
- United States Patent (19) : HarringtonDocument9 pagesUnited States Patent (19) : HarringtonBurak PalaNo ratings yet
- 5980 Series UTSDocument2 pages5980 Series UTSjohnardscullNo ratings yet
- Harmony Electromechanical Relays Catalog 2020Document45 pagesHarmony Electromechanical Relays Catalog 2020Gustavo PérezNo ratings yet
- An Ec 008 PDFDocument3 pagesAn Ec 008 PDFIsidoro OlveraNo ratings yet
- Vehicular Antenna CatalogDocument32 pagesVehicular Antenna CatalogArti SloboNo ratings yet
- Electrical Safety - Construction: OSHA Office of Training & Education 1Document41 pagesElectrical Safety - Construction: OSHA Office of Training & Education 1AmiibahNo ratings yet
- Safety Rules Final v3Document25 pagesSafety Rules Final v3S Rao CheepuriNo ratings yet
- A Mechatronic Seed Metering Control System For Improving Sowing Uniformity of PlantersDocument12 pagesA Mechatronic Seed Metering Control System For Improving Sowing Uniformity of PlantersChaitanya Madhaw PareekNo ratings yet
- 2020 CATALOG: Electric Fail-Safe UnitsDocument20 pages2020 CATALOG: Electric Fail-Safe UnitsleocastarlenasNo ratings yet
- Fmb50-Fmb80 Qs en v1Document4 pagesFmb50-Fmb80 Qs en v1Marcos Roberto de SouzaNo ratings yet
- Kumax: (1000 V / 1500 V) Cs3U-375 - 380 - 385 - 390 - 395MsDocument2 pagesKumax: (1000 V / 1500 V) Cs3U-375 - 380 - 385 - 390 - 395Mspatricio marin guerraNo ratings yet
- Series 6000: Description General SpecificationsDocument14 pagesSeries 6000: Description General SpecificationsGustavo AriasNo ratings yet
- Icp653443ar PCB ChangeDocument3 pagesIcp653443ar PCB ChangemarcelloNo ratings yet
- A. & H. Meyer Brochure 3Document21 pagesA. & H. Meyer Brochure 3Ivon LimNo ratings yet
- EV Catalog 2003Document88 pagesEV Catalog 2003tkhandelwalNo ratings yet
- PS2 ProtocolDocument3 pagesPS2 ProtocolFeli HermanNo ratings yet
- Mini, 7/8"-Round-Plug Connector, Single-Ended Cordsets, US Color CodeDocument2 pagesMini, 7/8"-Round-Plug Connector, Single-Ended Cordsets, US Color CodeAlfredo Hernandez FernandezNo ratings yet
- SIL3 230 Vac Relay Out Module For 10 A NE Loads: Features Technical DataDocument1 pageSIL3 230 Vac Relay Out Module For 10 A NE Loads: Features Technical DataSamim KhosraviNo ratings yet
- Rean Commercial Audio ConnectorsDocument1 pageRean Commercial Audio ConnectorsIbrahim NoorNo ratings yet
- User Manual: NeutronDocument34 pagesUser Manual: NeutronAldo TernavasioNo ratings yet
- User's Manual: Digital Video RecorderDocument71 pagesUser's Manual: Digital Video Recorderمارلون تشاريسNo ratings yet
- Session 2 - Mr. Piseth Chun, Corporate Planning, CambodiaDocument43 pagesSession 2 - Mr. Piseth Chun, Corporate Planning, CambodiaEnergy for AllNo ratings yet
- Sn74ls76a DDocument5 pagesSn74ls76a Djuanmmm41No ratings yet
- Hy-Gain 414 Big Gun 2Document11 pagesHy-Gain 414 Big Gun 2Robert GettyNo ratings yet
- CAN BusDocument7 pagesCAN BusMihnea DobreNo ratings yet
- Echometer WellDocument4 pagesEchometer WelljamesNo ratings yet
- Zenatti Final ThesisDocument160 pagesZenatti Final Thesisnayeem4444No ratings yet