You might also like
- Carburetor Circuits and Its Purpose and OperationDocument20 pagesCarburetor Circuits and Its Purpose and Operationandrewbilla240% (5)
- Agriculture Drone For Spraying Fertilizer and PesticidesDocument4 pagesAgriculture Drone For Spraying Fertilizer and PesticidesMohit Kumar AasnaniNo ratings yet
- 1000 JavaScript Interview QuestionsDocument200 pages1000 JavaScript Interview Questionsnarayanamoorthy knm100% (1)
- Artificial Intelligence Big Data 01 Research PaperDocument32 pagesArtificial Intelligence Big Data 01 Research PapermadhuraNo ratings yet
- Fortinet Fortigate Cli CheatsheetDocument2 pagesFortinet Fortigate Cli CheatsheetAyanNo ratings yet
- UntitledDocument880 pagesUntitledmahdi beheshti100% (1)
- Implementation and Comparison of Recommender Systems Using Various ModelsDocument13 pagesImplementation and Comparison of Recommender Systems Using Various ModelsIshan100% (1)
- Scania 5-Series Engine Inspection ManualDocument275 pagesScania 5-Series Engine Inspection Manualgiovani martinsNo ratings yet
- Gixxer 250 GSX250FRLZM0Document81 pagesGixxer 250 GSX250FRLZM0Nelson Rodrigo100% (1)
- DC Motor Speed Control Using Artificial Neural Network: Yogesh, Swati Gupta, Mahesh GargDocument6 pagesDC Motor Speed Control Using Artificial Neural Network: Yogesh, Swati Gupta, Mahesh GargSunitha RajuNo ratings yet
- DC Motor Speed Control Using Microcontroller: AbstractDocument5 pagesDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuNo ratings yet
- Design of Sensor Less Sliding-Mode BLDC Motor Speed Regulator Using Class of Uncertain Takagi-Sugeno Nonlinear SystemsDocument5 pagesDesign of Sensor Less Sliding-Mode BLDC Motor Speed Regulator Using Class of Uncertain Takagi-Sugeno Nonlinear SystemsijcnesNo ratings yet
- Energies 15 08260 v3Document39 pagesEnergies 15 08260 v313.ธนดล กองธรรมNo ratings yet
- Actuators 11 00117Document22 pagesActuators 11 00117Phanxay ChanthavongNo ratings yet
- Digital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniqueDocument6 pagesDigital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniquevendiNo ratings yet
- Speed Control and Direction Control of DC Motor Using Arm7: K.A.Wadile, S.R.Chillarge, D.D.JadhavDocument5 pagesSpeed Control and Direction Control of DC Motor Using Arm7: K.A.Wadile, S.R.Chillarge, D.D.JadhavNithish RameshNo ratings yet
- Papaer - Simulink With Cover Page v2Document8 pagesPapaer - Simulink With Cover Page v2RaghavNo ratings yet
- Neural Network ControlDocument2 pagesNeural Network ControlAamir YousufNo ratings yet
- ISA Transactions: Jinzhu Peng, Rickey DubayDocument11 pagesISA Transactions: Jinzhu Peng, Rickey DubayVictor PassosNo ratings yet
- Design and Implementation of Speed Control of Induction Motor Using Arduino Based FLCDocument5 pagesDesign and Implementation of Speed Control of Induction Motor Using Arduino Based FLCEditor IJTSRDNo ratings yet
- Dsp-Controlled Intelligent High-Performance AC Present FutureDocument8 pagesDsp-Controlled Intelligent High-Performance AC Present FuturePraful YadavNo ratings yet
- ANN-Based DTC Speed Control of Induction MotorDocument6 pagesANN-Based DTC Speed Control of Induction MotormazenNo ratings yet
- NCETSEM03Document5 pagesNCETSEM03Deepu ShellgiNo ratings yet
- Neurocomputing: K. Premkumar, B.V. ManikandanDocument11 pagesNeurocomputing: K. Premkumar, B.V. ManikandanAswani MucharlaNo ratings yet
- 1 s2.0 S0196890410003560 Main PDFDocument12 pages1 s2.0 S0196890410003560 Main PDFSelami AslanNo ratings yet
- Indirect Field Oriented Speed Control of An Induction Motor Drive by Using Pso AlgorithmDocument5 pagesIndirect Field Oriented Speed Control of An Induction Motor Drive by Using Pso AlgorithmĦana RababȜhNo ratings yet
- Implementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveDocument14 pagesImplementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveGery VerzaztNo ratings yet
- Speed Control of Induction Motor Using Fuzzy LogicDocument4 pagesSpeed Control of Induction Motor Using Fuzzy LogicEditor IJRITCCNo ratings yet
- ANN Based DTC for Variable Speed Wind Turbine Driven IGDocument11 pagesANN Based DTC for Variable Speed Wind Turbine Driven IGWeda SuryawanNo ratings yet
- Speed Control of DC Motor Using Neural Network ConfigurationDocument4 pagesSpeed Control of DC Motor Using Neural Network Configurationtariq76No ratings yet
- 06887513Document6 pages06887513Sidik HarijadiNo ratings yet
- Clamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachDocument10 pagesClamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachHsan HaddarNo ratings yet
- 5 Classical NCDocument14 pages5 Classical NCRaghavNo ratings yet
- Development and Implementation of A New Adaptive Intelligent Speed Controller For IPMSM DriveDocument10 pagesDevelopment and Implementation of A New Adaptive Intelligent Speed Controller For IPMSM DriveJose Leonardo Simancas GarciaNo ratings yet
- Back-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMDocument9 pagesBack-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMSaranji GuruNo ratings yet
- Design Nonlinear PID Neural Controller Speed Control Permanent Magnet DC MotorDocument12 pagesDesign Nonlinear PID Neural Controller Speed Control Permanent Magnet DC MotorAlghifariNo ratings yet
- Speed Control of A 2HP DC MotorDocument25 pagesSpeed Control of A 2HP DC MotorEdul BrianNo ratings yet
- PV Operated Fuzzy Based DC Motor Controlled Centrifugal Pump Used For IrrigationDocument4 pagesPV Operated Fuzzy Based DC Motor Controlled Centrifugal Pump Used For IrrigationSenthil KumarNo ratings yet
- Implementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmDocument7 pagesImplementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmMustafa AlhumayreNo ratings yet
- Effect of harmonics on asynchronous machinesDocument7 pagesEffect of harmonics on asynchronous machinespayalNo ratings yet
- Literature Review DC Motor Speed ControlDocument5 pagesLiterature Review DC Motor Speed Controlnynodok1pup3100% (1)
- Multilevel Inverter With Space Vector Modulation Intelligence Direct Torque Control of Induction Motor - IET Power ElectronicsDocument9 pagesMultilevel Inverter With Space Vector Modulation Intelligence Direct Torque Control of Induction Motor - IET Power ElectronicsAndre LimaNo ratings yet
- Microcontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMDocument4 pagesMicrocontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMSphasonke Daniel ZhouNo ratings yet
- Neural Network Based Induction Motor Speed ControllerDocument6 pagesNeural Network Based Induction Motor Speed ControllerYulia SetyaNingrumNo ratings yet
- Docslide - Us Hardware Assisted Energy Monitoring Architecture For Micro Sensor NodesDocument13 pagesDocslide - Us Hardware Assisted Energy Monitoring Architecture For Micro Sensor NodesRameshNo ratings yet
- Induction Motor Speed Control ThesisDocument7 pagesInduction Motor Speed Control ThesisPaperWritingServicesReviewsUK100% (2)
- Simulation and Implementation of An Embedded Hybrid Fuzzy Trained Artificial Neural Network Controller For Different DC MotorDocument18 pagesSimulation and Implementation of An Embedded Hybrid Fuzzy Trained Artificial Neural Network Controller For Different DC MotorvmspraneethNo ratings yet
- Speed Control of DC Motor Using Particle Swarm Optimization Technique IJERTV2IS60650Document7 pagesSpeed Control of DC Motor Using Particle Swarm Optimization Technique IJERTV2IS60650Yeduresapu SantoshNo ratings yet
- To Study, Analysis and Implementation of Power Quality Improvement Using DSTATCOM With ANN Back Propagation AlgorithmDocument8 pagesTo Study, Analysis and Implementation of Power Quality Improvement Using DSTATCOM With ANN Back Propagation AlgorithmEditor IJTSRDNo ratings yet
- R22 - D-STATCOM For Power Quality ImprovementDocument6 pagesR22 - D-STATCOM For Power Quality ImprovementAli Al-QattanNo ratings yet
- Relay Coordination Techniques Using SoftwareDocument4 pagesRelay Coordination Techniques Using Softwarerobertovm2002No ratings yet
- A Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandDocument8 pagesA Simple Robust Voltage Control of High Power Sensorless Induction Motor Drives With High Start Torque DemandsouravghimireyNo ratings yet
- Modrn Cont IMDocument25 pagesModrn Cont IMNAENWI YAABARINo ratings yet
- Application of Artificial Intelligence Controller For Dynamic Simulation of Induction Motor DrivesDocument7 pagesApplication of Artificial Intelligence Controller For Dynamic Simulation of Induction Motor DrivesDrPrashant M. MenghalNo ratings yet
- Shan Mug a Sun Dram 2012Document16 pagesShan Mug a Sun Dram 2012Sophia Petrea NogueiraNo ratings yet
- Matlab Simulation Model Design of Fuzzy Controller Based VF Speed Control of Three Phase Induction Motor IJERTV6IS010012Document6 pagesMatlab Simulation Model Design of Fuzzy Controller Based VF Speed Control of Three Phase Induction Motor IJERTV6IS010012NasserNo ratings yet
- 05 Articol 31 36Document6 pages05 Articol 31 36enghasan1969No ratings yet
- Precision Motion Control With Variable Speed AC Drives Using PLCDocument5 pagesPrecision Motion Control With Variable Speed AC Drives Using PLCMarulasiddappa H BNo ratings yet
- Speed Control of Three Phase Induction Motor Using Fuzzy Pid Controller IJERTV2IS110961Document6 pagesSpeed Control of Three Phase Induction Motor Using Fuzzy Pid Controller IJERTV2IS110961NithyashriNo ratings yet
- Speed Control of DC Motor Literature ReviewDocument5 pagesSpeed Control of DC Motor Literature Reviewea4gaa0g100% (1)
- Crossmark: Control Engineering PracticeDocument13 pagesCrossmark: Control Engineering PracticeLê Đức ThịnhNo ratings yet
- Using High-Control-Bandwidth FPGA and SiCDocument14 pagesUsing High-Control-Bandwidth FPGA and SiCDr. Ruqaiya KhanamNo ratings yet
- Neural Network-Based Robust Automatic Voltage Regulator (AVR) ofDocument14 pagesNeural Network-Based Robust Automatic Voltage Regulator (AVR) oftran duyNo ratings yet
- Automation of Belt Conveyor SystemDocument11 pagesAutomation of Belt Conveyor SystemSummA Learning CenterNo ratings yet
- A Project ProposalDocument5 pagesA Project ProposalMuhammad Umer FarooqNo ratings yet
- A Review: Speed Control of Brushless DC Motor: December 2017Document7 pagesA Review: Speed Control of Brushless DC Motor: December 2017Gopu MayyalaNo ratings yet
- FOC Design of PMSM by Multi-Objective OptimizationDocument7 pagesFOC Design of PMSM by Multi-Objective OptimizationHùng MạnhNo ratings yet
- H&M vs HM Megabrands Pvt. Ltd. & Ors: Analysis of Intellectual Property Rights Infringement CaseDocument13 pagesH&M vs HM Megabrands Pvt. Ltd. & Ors: Analysis of Intellectual Property Rights Infringement CaseIshanNo ratings yet
- Exp1 Ishan - 20211001023300Document10 pagesExp1 Ishan - 20211001023300IshanNo ratings yet
- Data Analysis For COVID-19: June 2020Document16 pagesData Analysis For COVID-19: June 2020IshanNo ratings yet
- Department of Computer Science and Engineering: Delhi Technological University Big Data Analysis Lab-BDA E3-G3Document4 pagesDepartment of Computer Science and Engineering: Delhi Technological University Big Data Analysis Lab-BDA E3-G3IshanNo ratings yet
- Get started with basic Excel formulasDocument84 pagesGet started with basic Excel formulasjerry kisuleNo ratings yet
- AltoQuadQuad-Dual v331 ReleaseNotesDocument8 pagesAltoQuadQuad-Dual v331 ReleaseNotespeichNo ratings yet
- Even 1819 Result - Results at IET LucknowDocument1 pageEven 1819 Result - Results at IET LucknowDurgesh MauryaNo ratings yet
- Harmonic Patterns: Guides To Profitable TradingDocument7 pagesHarmonic Patterns: Guides To Profitable TradingalokNo ratings yet
- DP Go 3Document2 pagesDP Go 3Ajeet KumarNo ratings yet
- 華語輔導系統使用說明 Mandarin Tutorial System GuidelineDocument11 pages華語輔導系統使用說明 Mandarin Tutorial System GuidelineAsnidar SiahaanNo ratings yet
- Organizational Structure TypeDocument7 pagesOrganizational Structure TypechaimaNo ratings yet
- The in Uence of The Building Shape On The Costs of Its ConstructionDocument14 pagesThe in Uence of The Building Shape On The Costs of Its ConstructionCornelius TapiwaNo ratings yet
- Massey Ferguson 1155 TRACTOR Service Parts Catalogue ManualDocument14 pagesMassey Ferguson 1155 TRACTOR Service Parts Catalogue Manualzhuangfuqian31No ratings yet
- Tugas CDocument3 pagesTugas CFatiaNo ratings yet
- IJSRED V2I5P1520190928 129446 F04isc Libre PDFDocument5 pagesIJSRED V2I5P1520190928 129446 F04isc Libre PDFHồ Mỹ DuyênNo ratings yet
- Job Aplication LetterDocument4 pagesJob Aplication LetterFebiola PurnamasariNo ratings yet
- LESSON 2 Roles of Educational Technology in LearningDocument14 pagesLESSON 2 Roles of Educational Technology in LearningJenny SamoranosNo ratings yet
- QRF For Supply Chain Social Audits (Sedex)Document4 pagesQRF For Supply Chain Social Audits (Sedex)anand shankarNo ratings yet
- Organizational Theory Quiz 1Document1 pageOrganizational Theory Quiz 1Shabana NaveedNo ratings yet
- LPC1788 User ManualDocument1,035 pagesLPC1788 User Manualamuzahid15No ratings yet
- Service & Support: Communication Between SIMATIC S5 and Simatic S7 Over ProfibusDocument30 pagesService & Support: Communication Between SIMATIC S5 and Simatic S7 Over ProfibusMhd Samer AlHamwiNo ratings yet
- Unit 1Document112 pagesUnit 1gemerb505No ratings yet
- Fundamentals of Mimo Wireless CommunicationDocument1 pageFundamentals of Mimo Wireless CommunicationshailiayushNo ratings yet
- Frequency ConverterDocument36 pagesFrequency ConverterSatyajitMishraNo ratings yet
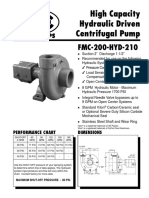
- FMC 200 Hyd 210Document2 pagesFMC 200 Hyd 210Ruben SaccoNo ratings yet
- Specification For 11/0.433 KV Distribution Transformers, Dry Type (Cast Resin), Ground Mounted For Indoor ApplicationsDocument10 pagesSpecification For 11/0.433 KV Distribution Transformers, Dry Type (Cast Resin), Ground Mounted For Indoor ApplicationsIhab Shawkiه8No ratings yet
- Caterpillar Performance Handbook 49 62020 Partie605Document4 pagesCaterpillar Performance Handbook 49 62020 Partie605ali alilouNo ratings yet