You might also like
- Oxford Solutions Intermediate Cumulative Test Answer Keys ADocument5 pagesOxford Solutions Intermediate Cumulative Test Answer Keys AAleks50% (2)
- Heat Balance For Steam Generator (Boiler) : Alarca, Braza, Gabriel, SebastianDocument43 pagesHeat Balance For Steam Generator (Boiler) : Alarca, Braza, Gabriel, SebastianCarlo SebastianNo ratings yet
- What Children Can Do That LLM's Can'tDocument10 pagesWhat Children Can Do That LLM's Can'tmuhsinmohammedNo ratings yet
- Necessity For Understanding Socially Embedded Phenomena: Agent-Based Social Simulation and ItsDocument8 pagesNecessity For Understanding Socially Embedded Phenomena: Agent-Based Social Simulation and ItsShpend IsmailiNo ratings yet
- Black HourseDocument10 pagesBlack Hourseamir barejiNo ratings yet
- RSTB 2018 0024 PDFDocument8 pagesRSTB 2018 0024 PDFPatricia RosasNo ratings yet
- How Social Software and Rich Computer MeDocument7 pagesHow Social Software and Rich Computer MeJana AtraNo ratings yet
- Rethinking The Entwinement Between Artificial Intell 2022 Computers and EducDocument16 pagesRethinking The Entwinement Between Artificial Intell 2022 Computers and Educcp3y2000-scribdNo ratings yet
- Technology in Education: October 2020Document14 pagesTechnology in Education: October 2020Haris KakakhelNo ratings yet
- Social SciencesDocument17 pagesSocial Sciencessoft evaluatorNo ratings yet
- AI Corpsocresp EdDocument78 pagesAI Corpsocresp EdRoshaanNo ratings yet
- The Presentation of The Networked Self Ethics and Epistemology in SocialDocument9 pagesThe Presentation of The Networked Self Ethics and Epistemology in SocialDannielJosseAlvarezzMojicaaXDNo ratings yet
- Machine HallucinationsDocument15 pagesMachine HallucinationsJesse LiNo ratings yet
- Serendipity As!an!emerging Design Principle Of!the!infosphere: Challenges And!opportunities Reviglio 2019Document16 pagesSerendipity As!an!emerging Design Principle Of!the!infosphere: Challenges And!opportunities Reviglio 2019Miguel MoralesNo ratings yet
- Unsupervised by Any Other Name - Hidden Layers of Knowledge Production in Artificial Intelligence On Social MediaDocument11 pagesUnsupervised by Any Other Name - Hidden Layers of Knowledge Production in Artificial Intelligence On Social MediaJames WilsonNo ratings yet
- 10 Years in AI - Foundations of General AI Gary MarkusDocument55 pages10 Years in AI - Foundations of General AI Gary MarkusStanislav SeNo ratings yet
- The Problem of Meaning in AI and Robotics: Still With Us After All These YearsDocument15 pagesThe Problem of Meaning in AI and Robotics: Still With Us After All These YearsceprunNo ratings yet
- Could Artificial IntelligenceDocument13 pagesCould Artificial IntelligenceCat SkullNo ratings yet
- 53 CampoloandCrawford2020Document19 pages53 CampoloandCrawford2020khyati123No ratings yet
- Artificial Intelligence in Education Cur-With-Cover-Page-V2Document14 pagesArtificial Intelligence in Education Cur-With-Cover-Page-V2Pajtim VelaNo ratings yet
- Behavioral and Brain Sciences (Forthcoming)Document62 pagesBehavioral and Brain Sciences (Forthcoming)arturbaran.akNo ratings yet
- The Philosophy of Artificial Intelligence: Toward Artificial Consciousness and Digital ImmortalityDocument8 pagesThe Philosophy of Artificial Intelligence: Toward Artificial Consciousness and Digital ImmortalityDavidNo ratings yet
- Proof CHB 107600Document16 pagesProof CHB 107600said bedjouNo ratings yet
- Towards Information Design Requirements 4th SpaceDocument23 pagesTowards Information Design Requirements 4th SpaceGordana Dodig-CrnkovicNo ratings yet
- HowBodiesMatter DIS2006Document10 pagesHowBodiesMatter DIS2006Diego ANo ratings yet
- Importance of Motivation and Emotion For Explaining Human cognition-DoernerandGuess2017Document3 pagesImportance of Motivation and Emotion For Explaining Human cognition-DoernerandGuess2017Psikologi 20 Ruang satuNo ratings yet
- ZezschwitzHS 2015HCIinIOTDocument108 pagesZezschwitzHS 2015HCIinIOTDesi ArisandiNo ratings yet
- Frontiers - Human Vs Artificial InteligenceDocument13 pagesFrontiers - Human Vs Artificial InteligenceSâmaraNo ratings yet
- Embodied Cognition and MathematicsDocument18 pagesEmbodied Cognition and MathematicsJelena Djulvezan MilkovićNo ratings yet
- WIREs Data Min Knowl - 2020 - Confalonieri - A Historical Perspective of Explainable Artificial IntelligenceDocument21 pagesWIREs Data Min Knowl - 2020 - Confalonieri - A Historical Perspective of Explainable Artificial IntelligenceIwan FitriantoNo ratings yet
- Chrislu Proposal 1Document3 pagesChrislu Proposal 1api-286637373No ratings yet
- Affective Human Humanoid Interaction THRDocument18 pagesAffective Human Humanoid Interaction THRchamintinNo ratings yet
- 1 s2.0 S0747563218305521 MainDocument8 pages1 s2.0 S0747563218305521 Mainodintsova.sergeyevnaNo ratings yet
- Articulo InglesDocument20 pagesArticulo InglesPedro Coronado ArrascueNo ratings yet
- Mental Models, Magical Thinking, and Individual Differences: AbstractDocument24 pagesMental Models, Magical Thinking, and Individual Differences: AbstractfaithnicNo ratings yet
- A Digital Test of Gabriel Tarde's Monads: The Whole Is Always Smaller Than Its PartsDocument21 pagesA Digital Test of Gabriel Tarde's Monads: The Whole Is Always Smaller Than Its Partspablo jensenNo ratings yet
- VU Social Sciences APA7 Paper Template-2Document11 pagesVU Social Sciences APA7 Paper Template-2emulatejunkyNo ratings yet
- Creativity and Artificial Intelligence-A Student PDocument11 pagesCreativity and Artificial Intelligence-A Student PMegha BlueskyNo ratings yet
- A Survey of Sentiment Analysis From Social Media DataDocument15 pagesA Survey of Sentiment Analysis From Social Media DataxzantelsaNo ratings yet
- Integrating Information in The Brain's EM Field: The Cemi Field Theory of ConsciousnessDocument13 pagesIntegrating Information in The Brain's EM Field: The Cemi Field Theory of ConsciousnessMohamed-DeqSabriyeNo ratings yet
- Alternative Essences of IntelligenceDocument8 pagesAlternative Essences of IntelligenceStephen EdwardsNo ratings yet
- Interpersonal Synchrony Special Issue: Hypyp: A Hyperscanning Python Pipeline For Inter-Brain Connectivity AnalysisDocument12 pagesInterpersonal Synchrony Special Issue: Hypyp: A Hyperscanning Python Pipeline For Inter-Brain Connectivity AnalysisAlexNo ratings yet
- Virtual Environment and AutismDocument15 pagesVirtual Environment and AutismDaniel NovakNo ratings yet
- The Debate Over Understanding in AI's Large Language ModelsDocument13 pagesThe Debate Over Understanding in AI's Large Language ModelsManuel BediaNo ratings yet
- Understanding Collective Intelligence WebDocument6 pagesUnderstanding Collective Intelligence WebIoan SusneaNo ratings yet
- Magic of Egregors Vitaliy Lozovskiy: International Conference Knowledge-Dialogue-Solutions 2007Document17 pagesMagic of Egregors Vitaliy Lozovskiy: International Conference Knowledge-Dialogue-Solutions 2007jefryNo ratings yet
- 00 Rogozea - Ethics and Artificial InteligenceDocument6 pages00 Rogozea - Ethics and Artificial Inteligencer_lilianaNo ratings yet
- Kurian Toddlers and RobotsDocument14 pagesKurian Toddlers and Robotsyuan09ieeNo ratings yet
- Puting - Eeee.cognition - PT AI 2017Document4 pagesPuting - Eeee.cognition - PT AI 2017Gordana Dodig-CrnkovicNo ratings yet
- Understanding Subjectivity: An Interactionist ViewDocument10 pagesUnderstanding Subjectivity: An Interactionist ViewA_WretchNo ratings yet
- Artificial Intelligence and Psychology Developments andDocument15 pagesArtificial Intelligence and Psychology Developments andJosé Luis PsicoterapeutaNo ratings yet
- Teaching Physics Concepts Using Educational Robotics: January 2020Document11 pagesTeaching Physics Concepts Using Educational Robotics: January 2020sirgeorge1987No ratings yet
- Becker Artificial Intelligence in EducationDocument23 pagesBecker Artificial Intelligence in EducationRavinder K SinglaNo ratings yet
- Testolin - FrontHumNeurosc 2020Document9 pagesTestolin - FrontHumNeurosc 2020Simone MaucciNo ratings yet
- Artificial Intelligence and Cognitive Psychology PDFDocument9 pagesArtificial Intelligence and Cognitive Psychology PDFAkashNo ratings yet
- Broaching Fragmented Learning v5Document10 pagesBroaching Fragmented Learning v5Gabriel Franca MarcolinoNo ratings yet
- Artificial Intelligencein Education Current Insightsand Future PerspectivesDocument14 pagesArtificial Intelligencein Education Current Insightsand Future PerspectivesGwendolyn PansoyNo ratings yet
- Social Work and Artificial Intelligence - Into The MatrixDocument4 pagesSocial Work and Artificial Intelligence - Into The Matrixgheithsuhad0599No ratings yet
- Learning AI and AI For LearningDocument7 pagesLearning AI and AI For LearningatirnogetNo ratings yet
- 2014 - A Survey of Personality ComputingDocument21 pages2014 - A Survey of Personality ComputingAji FauziNo ratings yet
- Virtual Humans: William R. SwartoutDocument3 pagesVirtual Humans: William R. SwartoutRandom UserNo ratings yet
- Frvir 05 1305758Document11 pagesFrvir 05 1305758Anonymous HUY0yRexYfNo ratings yet
- Voxel-Wise Brain Graphs From Diffusion MRI Intrinsic Eigenspace Dimensionality and Application To Functional MRIDocument10 pagesVoxel-Wise Brain Graphs From Diffusion MRI Intrinsic Eigenspace Dimensionality and Application To Functional MRIAnonymous HUY0yRexYfNo ratings yet
- s41377 023 01104 7 PDFDocument20 pagess41377 023 01104 7 PDFAnonymous HUY0yRexYfNo ratings yet
- Upper Limb Prostheses: Bridging The Sensory GapDocument9 pagesUpper Limb Prostheses: Bridging The Sensory GapAnonymous HUY0yRexYfNo ratings yet
- Voxel-Wise Brain Graphs From Diffusion MRI Intrinsic Eigenspace Dimensionality and Application To Functional MRIDocument10 pagesVoxel-Wise Brain Graphs From Diffusion MRI Intrinsic Eigenspace Dimensionality and Application To Functional MRIAnonymous HUY0yRexYfNo ratings yet
- Upper Limb Prostheses: Bridging The Sensory GapDocument9 pagesUpper Limb Prostheses: Bridging The Sensory GapAnonymous HUY0yRexYfNo ratings yet
- Frvir 04 1336581Document26 pagesFrvir 04 1336581Anonymous HUY0yRexYfNo ratings yet
- Zhao 2019 IOP Conf. Ser. Mater. Sci. Eng. 626 012003Document6 pagesZhao 2019 IOP Conf. Ser. Mater. Sci. Eng. 626 012003Anonymous HUY0yRexYfNo ratings yet
- 1 s2.0 S221321982100194X MainDocument7 pages1 s2.0 S221321982100194X MainPatrick SteinbergNo ratings yet
- PIIS1474442223000728Document2 pagesPIIS1474442223000728Anonymous HUY0yRexYfNo ratings yet
- Frvir 04 1100540Document9 pagesFrvir 04 1100540Anonymous HUY0yRexYfNo ratings yet
- Acsami 2c18984Document2 pagesAcsami 2c18984Anonymous HUY0yRexYfNo ratings yet
- All-Optical Image Classi Fication Through Unknown Random Diffusers Using A Single-Pixel Diffractive NetworkDocument15 pagesAll-Optical Image Classi Fication Through Unknown Random Diffusers Using A Single-Pixel Diffractive NetworkAnonymous HUY0yRexYfNo ratings yet
- Chemical Memory With Discrete Turing Patterns AppeDocument14 pagesChemical Memory With Discrete Turing Patterns AppeAnonymous HUY0yRexYfNo ratings yet
- Virtual Reality in The Rehabilitation of CognitiveDocument13 pagesVirtual Reality in The Rehabilitation of CognitiveAnonymous HUY0yRexYfNo ratings yet
- An Overview of Artificial Intelligence-Based SoftDocument14 pagesAn Overview of Artificial Intelligence-Based SoftAnonymous HUY0yRexYfNo ratings yet
- 1 s2.0 S2590109523000022 MainDocument20 pages1 s2.0 S2590109523000022 MainAnonymous HUY0yRexYfNo ratings yet
- Can The Early Use of Botulinum Toxin in Post Stroke Spasticity Reduce Contracture Development? A Randomised Controlled TrialDocument11 pagesCan The Early Use of Botulinum Toxin in Post Stroke Spasticity Reduce Contracture Development? A Randomised Controlled TrialAnonymous HUY0yRexYfNo ratings yet
- ìºÏÏÖÊ ÊõÔÚÒ Ñ ÊÖÊõ¿ÉÊÓ ÖÐ ÄÓ ÓÃÑÐ ¿Document7 pagesìºÏÏÖÊ ÊõÔÚÒ Ñ ÊÖÊõ¿ÉÊÓ ÖÐ ÄÓ ÓÃÑÐ ¿Anonymous HUY0yRexYfNo ratings yet
- Evaluating A Virtual Reality Sensory Room For Adults With DisabilitiesDocument13 pagesEvaluating A Virtual Reality Sensory Room For Adults With DisabilitiesAnonymous HUY0yRexYfNo ratings yet
- Frvir 04 1138660Document2 pagesFrvir 04 1138660Anonymous HUY0yRexYfNo ratings yet
- 1 s2.0 S2590109523000022 MainDocument20 pages1 s2.0 S2590109523000022 MainAnonymous HUY0yRexYfNo ratings yet
- Virtualworlds 02 00001Document15 pagesVirtualworlds 02 00001Anonymous HUY0yRexYfNo ratings yet
- Augmented Reality For Biomedical Wellness Sensor SystemsDocument11 pagesAugmented Reality For Biomedical Wellness Sensor SystemsAnonymous HUY0yRexYfNo ratings yet
- PIIS258975002200070XDocument13 pagesPIIS258975002200070XAnonymous HUY0yRexYfNo ratings yet
- Aaz8693 SMDocument8 pagesAaz8693 SMAnonymous HUY0yRexYfNo ratings yet
- JN 00784 2009Document10 pagesJN 00784 2009Anonymous HUY0yRexYfNo ratings yet
- Ijerph 17 03260Document12 pagesIjerph 17 03260Anonymous HUY0yRexYfNo ratings yet
- Simultaneous Ethylbenzene Decomposition by Ozone in A Liquid-Solid-Gas Three-Phase SystemDocument13 pagesSimultaneous Ethylbenzene Decomposition by Ozone in A Liquid-Solid-Gas Three-Phase SystemAnonymous HUY0yRexYfNo ratings yet
- Vaginal Microbiome-Host Interactions Modeled in A Human Vagina-On-A-ChipDocument18 pagesVaginal Microbiome-Host Interactions Modeled in A Human Vagina-On-A-ChipAnonymous HUY0yRexYfNo ratings yet
- ESP-report 22633 (31-33)Document23 pagesESP-report 22633 (31-33)1322 - Prasad KumbharNo ratings yet
- Instructor Manual For Financial & Managerial Accounting 16th (Sixteenth) Edition by Jan R. Williams, Sue F. Haka, Mark S. Bettner, Joseph V. CarcelloDocument7 pagesInstructor Manual For Financial & Managerial Accounting 16th (Sixteenth) Edition by Jan R. Williams, Sue F. Haka, Mark S. Bettner, Joseph V. CarcelloJonathonChavezbcsj100% (15)
- Standards For Email SecurityDocument2 pagesStandards For Email SecurityPeng GuinNo ratings yet
- Activity in Module 17Document2 pagesActivity in Module 17Minnie WagsinganNo ratings yet
- LKN To JBLP PDFDocument1 pageLKN To JBLP PDFMohd Kousar RazaNo ratings yet
- DC Que BankDocument11 pagesDC Que BankGaurav Kumbharde0% (1)
- Service Manual PFR82GDocument18 pagesService Manual PFR82GliderfgvNo ratings yet
- Service Manual: Front Panel KitDocument26 pagesService Manual: Front Panel KitJorge CorralesNo ratings yet
- About Jordan's PolicyDocument20 pagesAbout Jordan's PolicySaeed Al-SaeedNo ratings yet
- Assignment On ERPDocument3 pagesAssignment On ERPMithan BhowmickNo ratings yet
- Lab Exercise 2: Perform The Following TasksDocument2 pagesLab Exercise 2: Perform The Following Tasksdicin94115No ratings yet
- PSP VintageMeter Operation ManualDocument11 pagesPSP VintageMeter Operation Manualmunderwood1No ratings yet
- Grade Level: Suggested Unit Pacing (# of Days) :: Mathematical PracticesDocument3 pagesGrade Level: Suggested Unit Pacing (# of Days) :: Mathematical PracticesJhoy CabigasNo ratings yet
- 001 Hydraulics IntroDocument22 pages001 Hydraulics IntroShereen SweissNo ratings yet
- UMC 100 ManualDocument162 pagesUMC 100 ManualJunioCaetanoNo ratings yet
- EEE 435: Power Transmission and DistributionDocument2 pagesEEE 435: Power Transmission and DistributionNaeem HossainNo ratings yet
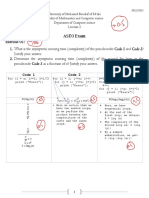
- Exercise 01:: ASD3 ExamDocument4 pagesExercise 01:: ASD3 Examjafar henniNo ratings yet
- Wing Load Calculation: (Example Document For LSA Applicants - v1 of 08.03.16)Document16 pagesWing Load Calculation: (Example Document For LSA Applicants - v1 of 08.03.16)Leonardo VasconcelosNo ratings yet
- Example of Array List Using Object Stud With Data Type StudentDocument3 pagesExample of Array List Using Object Stud With Data Type StudentNurul AinniNo ratings yet
- BrandIdentityforIG SECUREDDocument1 pageBrandIdentityforIG SECUREDSimone MartaNo ratings yet
- UntitledDocument64 pagesUntitledCHANDAN CHANDUNo ratings yet
- Use of Mobius: THE Transformations IN Neural Networks and Signal Process1 N GDocument10 pagesUse of Mobius: THE Transformations IN Neural Networks and Signal Process1 N GNavneet KumarNo ratings yet
- Data Interpretation PO Mains PDF Set 11Document42 pagesData Interpretation PO Mains PDF Set 11Nisha PariharNo ratings yet
- Ultra High Temperature Vacuum Furnace With Rapid Heating in Graphite EnvironmentDocument2 pagesUltra High Temperature Vacuum Furnace With Rapid Heating in Graphite EnvironmentvaleryNo ratings yet
- Gmaw and Metal TransferDocument14 pagesGmaw and Metal TransferAnant AjithkumarNo ratings yet
- Canada CC TopupDocument22 pagesCanada CC TopupFree RobuxNo ratings yet
- Topic 3 Slides - Demand ForecastingDocument28 pagesTopic 3 Slides - Demand ForecastingPetal RemonNo ratings yet
- Specificity and Designing of Multi-Hull Ships and Boats: January 2016Document3 pagesSpecificity and Designing of Multi-Hull Ships and Boats: January 2016Andrés VillarNo ratings yet