You might also like
- Frequency Response Analysis and Design: The Nyquist DiagramDocument34 pagesFrequency Response Analysis and Design: The Nyquist DiagramDejan StalovicNo ratings yet
- SR07Document7 pagesSR07khayrul islamNo ratings yet
- Fast Sketching of Nyquist Plot in Control Systems: S S S S S GHDocument13 pagesFast Sketching of Nyquist Plot in Control Systems: S S S S S GHAnil Srikanth DowleswarapuNo ratings yet
- Lectures 5 - Frequency Response: K. J. ÅströmDocument11 pagesLectures 5 - Frequency Response: K. J. ÅströmEdutamNo ratings yet
- Problem Set #6Document3 pagesProblem Set #6appuaadiNo ratings yet
- Dig Sheet 6Document4 pagesDig Sheet 6Ahmed AbdeazizNo ratings yet
- 1 Frequency Domain AnalysisDocument6 pages1 Frequency Domain AnalysisVijay RajuNo ratings yet
- CS-Lab Assignment-6 1913123Document35 pagesCS-Lab Assignment-6 1913123karthik rajuNo ratings yet
- EP 5511 - Lecture 07Document33 pagesEP 5511 - Lecture 07Solomon Tadesse AthlawNo ratings yet
- Chapter 6slideDocument72 pagesChapter 6slidehailegebreselassie24No ratings yet
- Class Test Ii, March 2013, Nit Silchar Subject: Control System-I Semester-2nd Branch-ECE Total Marks: 30 Time:-1 HourDocument1 pageClass Test Ii, March 2013, Nit Silchar Subject: Control System-I Semester-2nd Branch-ECE Total Marks: 30 Time:-1 HourPRASANTA ROYNo ratings yet
- CS 10Document27 pagesCS 10Kavya MamillaNo ratings yet
- ELEN E4830 Digital Image Processing Homework 6 Solution: 1 Edge DetectionDocument8 pagesELEN E4830 Digital Image Processing Homework 6 Solution: 1 Edge DetectionYeshmitha AnandNo ratings yet
- Notes 03 - Nyquist PlotsDocument3 pagesNotes 03 - Nyquist PlotsJai GaizinNo ratings yet
- Nyquist Diagram and Stability CriterionDocument28 pagesNyquist Diagram and Stability CriterionMaisNo ratings yet
- Nyquest & Bode Plot AnalysesDocument12 pagesNyquest & Bode Plot AnalysesSam185No ratings yet
- Polar Plot, Nyquist PlotDocument19 pagesPolar Plot, Nyquist PlotSirshendu100% (1)
- Arijit Nath - Nyquist PlotDocument8 pagesArijit Nath - Nyquist PlotTry meNo ratings yet
- CH2-3-Gantt ChartDocument10 pagesCH2-3-Gantt ChartMohammad HameedNo ratings yet
- Topic 3-Part 2-Frequency ResponseDocument54 pagesTopic 3-Part 2-Frequency ResponseBautista, Aljhon G.No ratings yet
- Response and Stability Analysis in Frequency DomainDocument54 pagesResponse and Stability Analysis in Frequency DomainMYNAMENo ratings yet
- Mathlab OkDocument5 pagesMathlab OkIT'S SIMPLENo ratings yet
- Communication System MatlabDocument21 pagesCommunication System MatlabEysha qureshiNo ratings yet
- 16-EL-A2 - Novembre 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Novembre 2017 - Version AnglaiseKahina ZitouniNo ratings yet
- Exam Ufmfv7 15 2Document8 pagesExam Ufmfv7 15 2Mohammed0% (1)
- R0004e - 2022 08 24Document8 pagesR0004e - 2022 08 24Felix WoxblomNo ratings yet
- Course Project 2023-2024 Group 2Document8 pagesCourse Project 2023-2024 Group 2elkjgNo ratings yet
- θ; and the externally applied torque T (t) - We findDocument11 pagesθ; and the externally applied torque T (t) - We findRau Lance CunananNo ratings yet
- 16-EL-A2 - Mai 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Mai 2017 - Version Anglaisemadani abdelhamidNo ratings yet
- Astrom ch7 PDFDocument18 pagesAstrom ch7 PDFSandra GilbertNo ratings yet
- Unit V M and N CirclesDocument20 pagesUnit V M and N Circleskrushnasamy subramaniyanNo ratings yet
- Course Project 2023-2024 Group 1Document8 pagesCourse Project 2023-2024 Group 1elkjgNo ratings yet
- NyquistDocument12 pagesNyquistOsel Novandi WitohendroNo ratings yet
- 5.4 Stability Margins: 5.4.1 Stability Margins in Terms of Gain Margin and Phase MarginDocument7 pages5.4 Stability Margins: 5.4.1 Stability Margins in Terms of Gain Margin and Phase MarginDevesh JayaswalNo ratings yet
- Assignment 1 - Block Diagrams and MatlabSimulinkDocument6 pagesAssignment 1 - Block Diagrams and MatlabSimulinkdavidmeszNo ratings yet
- Sampleproblems2 PDFDocument4 pagesSampleproblems2 PDFJose Martin Cisneros MandujanoNo ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument18 pages16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNo ratings yet
- Birla Institute of Technology & Science, Pilani Second Semester, 2020-21 Control Systems (EEE/INSTR F242) AssignmentDocument1 pageBirla Institute of Technology & Science, Pilani Second Semester, 2020-21 Control Systems (EEE/INSTR F242) AssignmentRishi GuptaNo ratings yet
- Solutions To Selected Problems in Chapter 5: 1 Problem 5.1Document13 pagesSolutions To Selected Problems in Chapter 5: 1 Problem 5.1Ian RidzuanNo ratings yet
- Panel Lifting Line Methods AERODocument27 pagesPanel Lifting Line Methods AEROzhigueras18No ratings yet
- Frequency Response Method (Continue)Document37 pagesFrequency Response Method (Continue)Edo SunardyNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- FDMcodeDocument9 pagesFDMcodeSand ShuklaNo ratings yet
- Signals and Systems Laboratory 7Document9 pagesSignals and Systems Laboratory 7Kthiha CnNo ratings yet
- EE342 Fall 2006 Final Exam: V (T) y (T) + + + e (T) U (T)Document4 pagesEE342 Fall 2006 Final Exam: V (T) y (T) + + + e (T) U (T)tt esNo ratings yet
- Notes-Nyquist Plot and Stability CriteriaDocument16 pagesNotes-Nyquist Plot and Stability CriteriaGanesh RadharamNo ratings yet
- Math 4Document23 pagesMath 4Anonymous UrzdtCB0INo ratings yet
- 10 Image Segmentation April 2019Document20 pages10 Image Segmentation April 2019Eng DlovanNo ratings yet
- Automatic Control II - Frequency ResponseDocument49 pagesAutomatic Control II - Frequency Responseعبدالحميد أبوشينةNo ratings yet
- Control Systems Theory: Sinusoidal Tools STB 35103Document42 pagesControl Systems Theory: Sinusoidal Tools STB 35103Akula VeerrajuNo ratings yet
- 9UGDocument7 pages9UGAnuj PatelNo ratings yet
- Chapter 5 HW Solution: Follower Displacement For Problem 2Document12 pagesChapter 5 HW Solution: Follower Displacement For Problem 2safin kaosarNo ratings yet
- 5.3 Polar Plots and Nyquist PlotsDocument7 pages5.3 Polar Plots and Nyquist PlotsKathleen Anne MendozaNo ratings yet
- 07 Golnaraghi App G G-1-G-20Document20 pages07 Golnaraghi App G G-1-G-20Adam KhanNo ratings yet
- ACS Experiments 3,4Document5 pagesACS Experiments 3,4Aditya SharmaNo ratings yet
- CS EC Paper End Sem BPDocument1 pageCS EC Paper End Sem BPPRASANTA ROYNo ratings yet
- Frequency Response (Report)Document19 pagesFrequency Response (Report)Mahmoud KassabNo ratings yet
- Fall 2010 Control Systems (EEE 226) Unit-3 Frequency Response Analysis Faculty: Ramesh Babu. NDocument40 pagesFall 2010 Control Systems (EEE 226) Unit-3 Frequency Response Analysis Faculty: Ramesh Babu. NVijay IndukuriNo ratings yet
- Detector de Fum Si Temperatura Apollo XP95-55000-885Document2 pagesDetector de Fum Si Temperatura Apollo XP95-55000-885dorobantu_alexandruNo ratings yet
- Evolution of Indian TolucaDocument28 pagesEvolution of Indian TolucaAlberto Duran IniestraNo ratings yet
- Atg SPRL 01 PDFDocument25 pagesAtg SPRL 01 PDFMuhammad Faiez AfzaalNo ratings yet
- Read The Following Paragraphs and Answer The Questions That FollowDocument18 pagesRead The Following Paragraphs and Answer The Questions That FollowMary Ann RanayNo ratings yet
- Slides Arrays Two Dimensional ArraysDocument12 pagesSlides Arrays Two Dimensional ArraysPratham MishraNo ratings yet
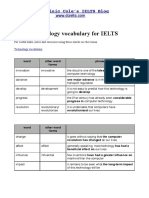
- Technology VocabularyDocument3 pagesTechnology VocabularyChixo GalaxyNo ratings yet
- Green Revolution: It's Acheivements and FailuresDocument24 pagesGreen Revolution: It's Acheivements and FailuresSingh HarmanNo ratings yet
- Laura Gentile Letter On Hampden County CourthouseDocument6 pagesLaura Gentile Letter On Hampden County CourthouseMassLiveNo ratings yet
- Safety Data Sheet: 1. IdentificationDocument7 pagesSafety Data Sheet: 1. IdentificationKhobeb MuslimNo ratings yet
- Morning Star Cafe Menu Revised 08-14-2019 On Line Menu 1Document2 pagesMorning Star Cafe Menu Revised 08-14-2019 On Line Menu 1api-471935951No ratings yet
- Polymer Structures: Issues To Address..Document34 pagesPolymer Structures: Issues To Address..Eugene Embalzado Jr.No ratings yet
- Trane 5 Ton HP Cond submittat4TWB3060-SUB-106 - 05.05 - 11012009Document2 pagesTrane 5 Ton HP Cond submittat4TWB3060-SUB-106 - 05.05 - 11012009nobleairNo ratings yet
- Tillotson HD & HR Service ManualDocument11 pagesTillotson HD & HR Service ManualBeckyNo ratings yet
- Ketron 1000 PEEK PDS E 30032019 01Document1 pageKetron 1000 PEEK PDS E 30032019 01jorgepradaco1No ratings yet
- Marine Upholstery SpecsDocument1 pageMarine Upholstery SpecsRezza KurniawanNo ratings yet
- Brooding and Rearing Baby ChicksDocument4 pagesBrooding and Rearing Baby ChicksRaymond KatabaziNo ratings yet
- Rider's Manual: BMW MotorradDocument136 pagesRider's Manual: BMW MotorradAlex Quintana100% (1)
- 23 - Eave StrutsDocument2 pages23 - Eave StrutsTuanQuachNo ratings yet
- The Anaphylactic ShockDocument8 pagesThe Anaphylactic ShockRooby JeanpierreNo ratings yet
- Atomic Rex A Kaiju Thriller (Matthew Dennion) (Z-Library)Document163 pagesAtomic Rex A Kaiju Thriller (Matthew Dennion) (Z-Library)Strictly Aviator Amritansh VermaNo ratings yet
- Geotechnical Laboratory: Open-Ended LabDocument7 pagesGeotechnical Laboratory: Open-Ended LabNoorshahira Md IsaNo ratings yet
- MCQ DTSDocument3 pagesMCQ DTSraja93satNo ratings yet
- A Better World - Volume 5Document146 pagesA Better World - Volume 5Zainuddin BusuNo ratings yet
- System Substation Commissioning TestsDocument8 pagesSystem Substation Commissioning TestsCvijayakumar100% (1)
- P1 - Duct Design IntroductionDocument30 pagesP1 - Duct Design IntroductionAndryx MartinezNo ratings yet
- Mathematics (Course 18)Document24 pagesMathematics (Course 18)NickNo ratings yet
- Documentation ExamplesDocument5 pagesDocumentation ExamplesErika HarveryNo ratings yet
- Denel Dynamics Product Brochure PDFDocument36 pagesDenel Dynamics Product Brochure PDFeggboy196967% (3)
- How I Quit SmokingDocument17 pagesHow I Quit Smokingquitsmoking100% (3)
- Reading Week 13Document6 pagesReading Week 13Quy PhanNo ratings yet