You might also like
- Fault Codes HyundaiDocument12 pagesFault Codes HyundaiAnonymous j7LBFXO50% (2)
- Reliance Jio's Internal ResourcesDocument17 pagesReliance Jio's Internal ResourcesBatch 2020-22100% (1)
- Cambridge English Empower B2 Progress Test: Student NameDocument12 pagesCambridge English Empower B2 Progress Test: Student NameCheto CepedaNo ratings yet
- Unit - I: Introduction To Embedded SystemsDocument47 pagesUnit - I: Introduction To Embedded SystemsaishwaryaNo ratings yet
- Flower Power VW Van Pillow: Patterns By: Deborah Bagley, Dana Bincer &Document5 pagesFlower Power VW Van Pillow: Patterns By: Deborah Bagley, Dana Bincer &Rodica Nicolau75% (4)
- مسيطرات كاملDocument101 pagesمسيطرات كاملahmed aliraqiNo ratings yet
- MICROCONTROLLER GUIDEDocument28 pagesMICROCONTROLLER GUIDERynefel ElopreNo ratings yet
- Unit 4 - L Notes - Introduction To MicrocontrollerDocument53 pagesUnit 4 - L Notes - Introduction To MicrocontrollerAKSHANSH MATHUR100% (1)
- MP Manual 2Document73 pagesMP Manual 2Subir ShresthaNo ratings yet
- Sistem Mikropemproses & PengawalmikroDocument388 pagesSistem Mikropemproses & Pengawalmikrozahrim100% (1)
- Microcontrollers vs MicroprocessorsDocument20 pagesMicrocontrollers vs MicroprocessorsGucciNo ratings yet
- MP Manual BscitDocument135 pagesMP Manual BscitSubir ShresthaNo ratings yet
- Microcontrollers LectureDocument13 pagesMicrocontrollers LectureIrvine ChibayaNo ratings yet
- Unit 4Document85 pagesUnit 4Chadaram JagadishNo ratings yet
- Lecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Document34 pagesLecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Tushar VermaNo ratings yet
- 1 Course Material - All Chapter 04-01-2024Document148 pages1 Course Material - All Chapter 04-01-2024RU MATH GamerNo ratings yet
- Microcontrollerpresentation 141213101338 Conversion Gate01Document41 pagesMicrocontrollerpresentation 141213101338 Conversion Gate01priyalNo ratings yet
- CPEN 100 Structural Components of Microprocessor and Microcontroller.1Document35 pagesCPEN 100 Structural Components of Microprocessor and Microcontroller.1Jiever AustriaNo ratings yet
- Microcontroller:: Chapter-8: MicrocontrollersDocument20 pagesMicrocontroller:: Chapter-8: MicrocontrollersMd Raton AliNo ratings yet
- Understanding the Architecture of the 8051 MicrocontrollerDocument113 pagesUnderstanding the Architecture of the 8051 Microcontrollerpraneeth saiNo ratings yet
- Chapter 1Document45 pagesChapter 1udgam pandeyNo ratings yet
- PROGRAMMABLE LOGIC CONTROLLER (PLC) DEFINITIONDocument44 pagesPROGRAMMABLE LOGIC CONTROLLER (PLC) DEFINITIONPradip AmboreNo ratings yet
- MICROPROCESSOR UNIT I SYLLABUSDocument54 pagesMICROPROCESSOR UNIT I SYLLABUSNikhil DeshmukhNo ratings yet
- Microprocessor and ControllerDocument18 pagesMicroprocessor and ControllerSai Murali SirapuNo ratings yet
- ControllerDocument142 pagesControllerlyalashwanyNo ratings yet
- Microprocessors and Embedded SystemsDocument32 pagesMicroprocessors and Embedded SystemsEmmanuel MupingaNo ratings yet
- Microcontrollers - Types & Applications What Is A Microcontroller?Document5 pagesMicrocontrollers - Types & Applications What Is A Microcontroller?nazmulNo ratings yet
- Introduction to MicroprocessorsDocument24 pagesIntroduction to MicroprocessorsDeva RaguNo ratings yet
- MCA Sessional1 2023 24Document87 pagesMCA Sessional1 2023 24Jayraj SONINo ratings yet
- SEC1310Document169 pagesSEC1310Su YeeNo ratings yet
- Microcontroller Basics ExplainedDocument2 pagesMicrocontroller Basics ExplainedJK CreationNo ratings yet
- Module 1Document18 pagesModule 1Rohit AnejaNo ratings yet
- Presentaion 6 Microcontroller and MicroprocessorDocument27 pagesPresentaion 6 Microcontroller and MicroprocessorwabdushukurNo ratings yet
- Introduction To MicrocontrollersDocument12 pagesIntroduction To MicrocontrollersFaizan AhmadNo ratings yet
- 8085 Complete Note PDFDocument54 pages8085 Complete Note PDFBipin GhimireNo ratings yet
- TOPIC - 1 MicroprocessorDocument38 pagesTOPIC - 1 MicroprocessorPrevenaManiamNo ratings yet
- PDR - Unit IDocument16 pagesPDR - Unit IMUKILANNo ratings yet
- Mecha Unit IIDocument96 pagesMecha Unit IICAD With RaoNo ratings yet
- Chapter One Introduction & Evolution of MicroprocessorDocument68 pagesChapter One Introduction & Evolution of Microprocessorabel bahiru100% (1)
- Microcontroller Vs Microcomputer: Key DifferencesDocument40 pagesMicrocontroller Vs Microcomputer: Key DifferencesNgaa SiemensNo ratings yet
- Saksham - ES Lab FileDocument39 pagesSaksham - ES Lab FileAbhishek GiriNo ratings yet
- Microprocessors and MicrocontrollersDocument22 pagesMicroprocessors and Microcontrollers6012 ANILNo ratings yet
- Introduction To The 68Hc12 MicrocontrollerDocument28 pagesIntroduction To The 68Hc12 Microcontrollerahetdhaezh100% (2)
- Design CharacteristicsDocument11 pagesDesign CharacteristicsFrankline OchiengNo ratings yet
- 2nd CHAPTER MechatronicsDocument50 pages2nd CHAPTER MechatronicspremscrebdNo ratings yet
- What Is A Microprocessor?: Introduction To PICDocument20 pagesWhat Is A Microprocessor?: Introduction To PICNEETHU PRAKASHNo ratings yet
- Micro ControllersDocument28 pagesMicro Controllersyoboiiii649No ratings yet
- Microprocessor CH 01Document56 pagesMicroprocessor CH 01hari kcNo ratings yet
- Introduction to Peripherals and Interfacing LectureDocument23 pagesIntroduction to Peripherals and Interfacing Lectureabu sayedNo ratings yet
- Unit 01: BEE-15ADocument22 pagesUnit 01: BEE-15APrashant SinghNo ratings yet
- 5-Microcontrollers 8051Document8 pages5-Microcontrollers 8051Dhiraj ShahNo ratings yet
- Mcu - Pic - 2019 PDFDocument60 pagesMcu - Pic - 2019 PDFThành TâmNo ratings yet
- PLC 2021 ArchitectureDocument62 pagesPLC 2021 ArchitectureJosephNo ratings yet
- Lab01 MP PDFDocument11 pagesLab01 MP PDFAlicia KohNo ratings yet
- Microcontroller&Its Applications 2021 NotesDocument38 pagesMicrocontroller&Its Applications 2021 NotesAnirban MandalNo ratings yet
- Processor Architecture 2Document67 pagesProcessor Architecture 2patolesahil9371No ratings yet
- Chapter-1 Introductionto Embedded SystemDocument40 pagesChapter-1 Introductionto Embedded SystemDeepak KumarNo ratings yet
- What Is A PIC Microcontroller?Document7 pagesWhat Is A PIC Microcontroller?jw368899No ratings yet
- Microprocessors: General-purpose microprocessor and its systemDocument18 pagesMicroprocessors: General-purpose microprocessor and its systemSangamesh V AngadiNo ratings yet
- Microprocessor Architecture and Programming with 8085Document56 pagesMicroprocessor Architecture and Programming with 8085sanjoy banerjeeNo ratings yet
- Microprocessor: Engr. Mark Angelo Y. Santos, ECE, ECTDocument59 pagesMicroprocessor: Engr. Mark Angelo Y. Santos, ECE, ECTMike FinezaNo ratings yet
- CS 208-1-3 Organization of A Microcomputer by Baldev Ram MaliDocument12 pagesCS 208-1-3 Organization of A Microcomputer by Baldev Ram MaliINFINITY GAmErNo ratings yet
- Microcontroller Wikipedia Article SummaryDocument8 pagesMicrocontroller Wikipedia Article Summarychella_duraiNo ratings yet
- Chapter 3 Layout of Workshops111Document37 pagesChapter 3 Layout of Workshops111belaynehNo ratings yet
- CH 5-1Document38 pagesCH 5-1belaynehNo ratings yet
- Chapter - 6 Investment EvaluationDocument33 pagesChapter - 6 Investment EvaluationbelaynehNo ratings yet
- Chapter Seven: Basic Accounting Principles & Budgeting FundamentalsDocument35 pagesChapter Seven: Basic Accounting Principles & Budgeting FundamentalsbelaynehNo ratings yet
- Vehicular Maintenance and Diagnostics: Chapter 2 Failure Statistics and Reliability ConceptsDocument45 pagesVehicular Maintenance and Diagnostics: Chapter 2 Failure Statistics and Reliability ConceptsbelaynehNo ratings yet
- INdu ASDocument7 pagesINdu ASbelaynehNo ratings yet
- CH-5 Basics of Digital LogicsDocument26 pagesCH-5 Basics of Digital LogicsbelaynehNo ratings yet
- CRD - c48 CRD-C48-92 Standard Test Method For Water Permeability of ConcreteDocument4 pagesCRD - c48 CRD-C48-92 Standard Test Method For Water Permeability of ConcreteazharbNo ratings yet
- CCIE SPv4 Topology DiagramsDocument17 pagesCCIE SPv4 Topology DiagramsTilak RoyNo ratings yet
- Finlatics NotesDocument48 pagesFinlatics NotesShailesh TirkeyNo ratings yet
- Sistema Diesel 1 PDFDocument13 pagesSistema Diesel 1 PDFstalin vNo ratings yet
- Principles of Economics 5th Edition Frank Test BankDocument18 pagesPrinciples of Economics 5th Edition Frank Test Bankmohicans.meute.jhwyt100% (19)
- 55174A92 QS II Basic Model With ADSU (Diktron) User Manual ENDocument28 pages55174A92 QS II Basic Model With ADSU (Diktron) User Manual ENSorin MilicaNo ratings yet
- 6 - StringsDocument19 pages6 - Stringsaljazi mNo ratings yet
- Microsoft Excel Exam Assessment Questions: Important InstructionsDocument3 pagesMicrosoft Excel Exam Assessment Questions: Important InstructionsKaartiikBenNo ratings yet
- High Rise OHEDocument35 pagesHigh Rise OHESanjay Narang100% (5)
- Fire Risk Assessment FormDocument20 pagesFire Risk Assessment FormAhmed Ibrahim100% (1)
- Thesis Paper On Mobile Banking in BangladeshDocument8 pagesThesis Paper On Mobile Banking in Bangladeshaflnzefdqbrevm100% (2)
- 6 Axis Breakout Board Wiring and SetupDocument5 pages6 Axis Breakout Board Wiring and SetupJalaj ChhalotreNo ratings yet
- Testing and Sampling Parameters for Boiler Water FeedDocument17 pagesTesting and Sampling Parameters for Boiler Water FeedGuruNo ratings yet
- Caterpillar Performance Handbook 49 62020 Partie605Document4 pagesCaterpillar Performance Handbook 49 62020 Partie605ali alilouNo ratings yet
- umati@EMO Hannover 2019Document8 pagesumati@EMO Hannover 2019frasorNo ratings yet
- Computer (Dempo Group)Document9 pagesComputer (Dempo Group)Kenichi Okta HerwantoNo ratings yet
- HostDocument78 pagesHostEndgame BoyNo ratings yet
- USA IT Staffing - Roles of Bench Sale RecruitersDocument37 pagesUSA IT Staffing - Roles of Bench Sale Recruitersyaminika singereddyNo ratings yet
- Vaadin 14 Scalability Report - December 2019Document26 pagesVaadin 14 Scalability Report - December 2019dskumargNo ratings yet
- Data Mining 1-3Document29 pagesData Mining 1-3Singer JerowNo ratings yet
- Method Taken From Spirax Sarco Technical Guidance: Calculation No.: Sheet: Device Tag: DescriptionDocument9 pagesMethod Taken From Spirax Sarco Technical Guidance: Calculation No.: Sheet: Device Tag: Descriptionfahmi0% (1)
- 華語輔導系統使用說明 Mandarin Tutorial System GuidelineDocument11 pages華語輔導系統使用說明 Mandarin Tutorial System GuidelineAsnidar SiahaanNo ratings yet
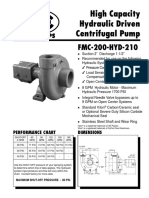
- FMC 200 Hyd 210Document2 pagesFMC 200 Hyd 210Ruben SaccoNo ratings yet
- Love Our CultureDocument2 pagesLove Our CulturePutry LinggarNo ratings yet
- Devanshi Shipping Agency PVT LTD: Infinity International Infinity InternationalDocument5 pagesDevanshi Shipping Agency PVT LTD: Infinity International Infinity InternationalTARUN SUTHARNo ratings yet
- SQLPlus Concurrent Program in Oracle AppsDocument5 pagesSQLPlus Concurrent Program in Oracle AppsTikendra Kumar PalNo ratings yet