You might also like
- Functional Operators (AM-22), Volume 2: The Geometry of Orthogonal Spaces. (AM-22)From EverandFunctional Operators (AM-22), Volume 2: The Geometry of Orthogonal Spaces. (AM-22)No ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Lec 23-24 Euler MethodDocument36 pagesLec 23-24 Euler MethodEngineer Inside33% (3)
- Example: The Wronskian Determinant of A Second-Order, Linear Homogeneous Differential EquationDocument2 pagesExample: The Wronskian Determinant of A Second-Order, Linear Homogeneous Differential EquationJonathan FebriantoNo ratings yet
- Solutions To Habermans Book Applied Part PDFDocument420 pagesSolutions To Habermans Book Applied Part PDFSarah Suelen100% (1)
- David L. Powers - Boundary Value Problems - and Partial Differential Equations-Academic Press (2009)Document518 pagesDavid L. Powers - Boundary Value Problems - and Partial Differential Equations-Academic Press (2009)Sabri AlkhaliliNo ratings yet
- The WronskianDocument4 pagesThe WronskianNiranjan KumarNo ratings yet
- A First Course in Elementary Differential EquationsDocument213 pagesA First Course in Elementary Differential Equationsjdsparagas100% (1)
- Mathematics: Self-Learning Module 2Document16 pagesMathematics: Self-Learning Module 2ZAGUIRRE PRINCESS EZRA CONTRERAS100% (1)
- Lesson 1: Numerical Solutions of ODE and PDEDocument4 pagesLesson 1: Numerical Solutions of ODE and PDENarasimha ReddyNo ratings yet
- Numerical Solution of Differential Equations I: Alberto Paganini April 19, 2018Document36 pagesNumerical Solution of Differential Equations I: Alberto Paganini April 19, 2018rinioririnNo ratings yet
- MATH 219: Spring 2021-22Document5 pagesMATH 219: Spring 2021-22HesapNo ratings yet
- Math 333 Higher Order Linear Differential Equations: Kenyon College Paquind@kenyon - EduDocument4 pagesMath 333 Higher Order Linear Differential Equations: Kenyon College Paquind@kenyon - EduDrazen Emir Lim-Barraca Bernardo-LegaspiNo ratings yet
- Classify DEsDocument5 pagesClassify DEsfree_progNo ratings yet
- Lecture 8Document33 pagesLecture 8Orlando FernandezNo ratings yet
- A First Course in Elementary Differential EquationsDocument241 pagesA First Course in Elementary Differential EquationsMaruf AbdallaNo ratings yet
- Differential EquationsDocument231 pagesDifferential EquationsNasir NaeemNo ratings yet
- 0 0 0 0 0 Dy DTDocument4 pages0 0 0 0 0 Dy DTBob SandersNo ratings yet
- 5 LinearizedEquationsAboutRestPoints 22C W15Document39 pages5 LinearizedEquationsAboutRestPoints 22C W15Meysam GheysariNo ratings yet
- 6.7. Ordinary Differential Equation (Ode) and PDEDocument37 pages6.7. Ordinary Differential Equation (Ode) and PDEEyu KalebNo ratings yet
- 4.1 General Theory of NTH Order Linear EquationsDocument19 pages4.1 General Theory of NTH Order Linear EquationsMohNajiNo ratings yet
- ClaudiaDocument178 pagesClaudiaemanueluntesuNo ratings yet
- Differential Equation Lecture Note 2Document28 pagesDifferential Equation Lecture Note 2장준영No ratings yet
- Solve Systems of Differential EquationsDocument225 pagesSolve Systems of Differential EquationsInspire LoNo ratings yet
- Study Questions - Applied Numerical Methods Part 1Document33 pagesStudy Questions - Applied Numerical Methods Part 1Folarin EmmanuelNo ratings yet
- The ST Ormer-Verlet Method: 1 Ordinary Differential EquationsDocument14 pagesThe ST Ormer-Verlet Method: 1 Ordinary Differential EquationsGabriel SandovalNo ratings yet
- 3 HproblemsDocument8 pages3 HproblemsManish MeenaNo ratings yet
- (Ozgur) - Lecture 4 (2.4)Document7 pages(Ozgur) - Lecture 4 (2.4)Orkun AkyolNo ratings yet
- Ordinary Differential Equations 1: Dhriti Ranjan DolaiDocument31 pagesOrdinary Differential Equations 1: Dhriti Ranjan DolaiSoumya Ranjan SahooNo ratings yet
- Lesson2-2 (2) - 2 PDFDocument11 pagesLesson2-2 (2) - 2 PDFHugo NavaNo ratings yet
- Picard's Existence and Uniqueness Theorem: 0 0 0 @F @y 0 0 0 0 X NDocument7 pagesPicard's Existence and Uniqueness Theorem: 0 0 0 @F @y 0 0 0 0 X NadligumelarNo ratings yet
- Ivp HandoutDocument101 pagesIvp HandoutLucas SantosNo ratings yet
- An Example of A Non-Linear Differential Equation: R. C. DailedaDocument3 pagesAn Example of A Non-Linear Differential Equation: R. C. Dailedavasanth9046No ratings yet
- Math 53 Study GuideDocument4 pagesMath 53 Study GuideBabujiNo ratings yet
- Boyce/Diprima 9 Ed, CH 2.4: Differences Between Linear and Nonlinear EquationsDocument15 pagesBoyce/Diprima 9 Ed, CH 2.4: Differences Between Linear and Nonlinear EquationsAnonymous OrhjVLXO5sNo ratings yet
- Differential Difference EquationsDocument124 pagesDifferential Difference EquationsZ DayNo ratings yet
- Solutions of Differential Equations: ʆ y S ʆ y S y (0) S y ' (0) Sy y (0), yDocument6 pagesSolutions of Differential Equations: ʆ y S ʆ y S y (0) S y ' (0) Sy y (0), yLinearNo ratings yet
- 01 Differential Equations - IntroductionDocument41 pages01 Differential Equations - IntroductionRemo Rubian EvangelistaNo ratings yet
- 4 Relevant CoursenotesDocument14 pages4 Relevant CoursenotesRida ahmedNo ratings yet
- Handout Numerical Method ODEDocument36 pagesHandout Numerical Method ODEMirin GlansonNo ratings yet
- Methods For Ordinary Differential Equations: 5.1 Initial-Value ProblemsDocument20 pagesMethods For Ordinary Differential Equations: 5.1 Initial-Value Problemsupasana9No ratings yet
- 2.2 Second Order Linear Homogeneous ODE With Constant CoefficientsDocument7 pages2.2 Second Order Linear Homogeneous ODE With Constant CoefficientsBhupi.SamNo ratings yet
- Second Order Linear Differential Equations: 3.1. Introduction Basic TerminologyDocument47 pagesSecond Order Linear Differential Equations: 3.1. Introduction Basic TerminologyLloyd Dackz ArenasNo ratings yet
- 04 Higher Order ODE - 65b99f988af93Document14 pages04 Higher Order ODE - 65b99f988af93Noppadol SuntitanatadaNo ratings yet
- Ma 266 ReviewDocument9 pagesMa 266 ReviewiiiiiiiNo ratings yet
- 1st Order PDFDocument26 pages1st Order PDFkurakidNo ratings yet
- M244: Solutions To Final Exam Review: 2 DX DTDocument15 pagesM244: Solutions To Final Exam Review: 2 DX DTheypartygirlNo ratings yet
- Second Order Linear Equations: A ® Ë@ Õæ Aë Áöß at - X - at Ú Gajë@ É ®Ë@Document34 pagesSecond Order Linear Equations: A ® Ë@ Õæ Aë Áöß at - X - at Ú Gajë@ É ®Ë@MohNajiNo ratings yet
- Tutorial 2Document2 pagesTutorial 2Arpita MathurNo ratings yet
- Dif LecturenotesDocument168 pagesDif LecturenotesbaransakirhvhNo ratings yet
- Chapter 01-01Document36 pagesChapter 01-01Yo Liang SikNo ratings yet
- Ode 2Document29 pagesOde 2teperosombreroNo ratings yet
- Differential Equations Notes: Author Vincent HuangDocument16 pagesDifferential Equations Notes: Author Vincent HuangVincent HuangNo ratings yet
- Lecture Accuracy StabilityDocument17 pagesLecture Accuracy StabilityBetou OuedraogoNo ratings yet
- CH 2.4: Differences Between Linear and Nonlinear EquationsDocument15 pagesCH 2.4: Differences Between Linear and Nonlinear EquationsMario SihombingNo ratings yet
- Chapter Two Second Order Ordinary Differential Equation (SOODE)Document11 pagesChapter Two Second Order Ordinary Differential Equation (SOODE)BennyNo ratings yet
- Diff EQ SoltionsDocument242 pagesDiff EQ SoltionsLake LoweNo ratings yet
- Lecture 24Document5 pagesLecture 24utech.ujuziNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Transient Response Stability: Solutions To Case Studies Challenges Antenna Control: Stability Design Via GainDocument43 pagesTransient Response Stability: Solutions To Case Studies Challenges Antenna Control: Stability Design Via Gain오유택No ratings yet
- The Standard Form of A Quadratic Equation in One Variable Is AxDocument2 pagesThe Standard Form of A Quadratic Equation in One Variable Is Axanil5666No ratings yet
- MA 242: Partial Differential Equations (August-December, 2018)Document2 pagesMA 242: Partial Differential Equations (August-December, 2018)Sai GokulNo ratings yet
- Finite Diff PDFDocument14 pagesFinite Diff PDFElshan AliyevNo ratings yet
- DEDocument26 pagesDERobertBellarmineNo ratings yet
- Week 1 WorksheetDocument10 pagesWeek 1 WorksheetAubrey LastimosaNo ratings yet
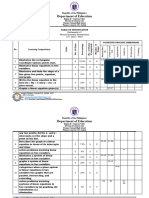
- TOS - SY-2022-2023-in-MATH-8 - QUARTER 2Document3 pagesTOS - SY-2022-2023-in-MATH-8 - QUARTER 2RYAN C. ENRIQUEZNo ratings yet
- Activity 1: Choose Me Up!: Learning Activity Sheets 3 GRADE 9 MathematicsDocument4 pagesActivity 1: Choose Me Up!: Learning Activity Sheets 3 GRADE 9 MathematicsRandallxxxNo ratings yet
- Chapter 3 TWO-DIMENSIONAL STEADY STATE CONDUCTIONDocument81 pagesChapter 3 TWO-DIMENSIONAL STEADY STATE CONDUCTIONYash MoreyNo ratings yet
- Block Test 1 - Mathematics A Level 10 - 2023 - 2024Document2 pagesBlock Test 1 - Mathematics A Level 10 - 2023 - 2024Joachim Boaz SugengNo ratings yet
- LectureO09 PDFDocument40 pagesLectureO09 PDFAbdul RahimNo ratings yet
- Mathematical Expressions VS Mathematical Sentences (Equations)Document2 pagesMathematical Expressions VS Mathematical Sentences (Equations)Julie Aviles TimonNo ratings yet
- Finite Difference Method With Dirichlet Problems oDocument10 pagesFinite Difference Method With Dirichlet Problems oAlex PhotographyNo ratings yet
- Math TanishDocument15 pagesMath Tanishpriyanshi vermaNo ratings yet
- Kuliah - Solusi Numerik Persamaan Diferensial - MHSDocument29 pagesKuliah - Solusi Numerik Persamaan Diferensial - MHSHendrik V SihombingNo ratings yet
- AXXXCDocument9 pagesAXXXCAshwin MinzNo ratings yet
- Solutions To The Diffusion EquationDocument18 pagesSolutions To The Diffusion EquationYasir AliNo ratings yet
- Simultaneous Equation IGCSE 02-05Document2 pagesSimultaneous Equation IGCSE 02-05EriqNo ratings yet
- HW LogDocument9 pagesHW LogKhairi IsmailNo ratings yet
- Four Page PDFDocument4 pagesFour Page PDFabhishekNo ratings yet
- L B L B LLL: C C R C CDocument4 pagesL B L B LLL: C C R C Cplasma_2003No ratings yet
- Hamilton-Jacobi Equations: University of HelsinkiDocument73 pagesHamilton-Jacobi Equations: University of HelsinkiAbhishek ChandraNo ratings yet
- Simultaneous EquationsDocument3 pagesSimultaneous EquationsHamza KahemelaNo ratings yet
- ΚΕΧΑΓΙΑΣ DIAFORIKES EXISOSEISDocument272 pagesΚΕΧΑΓΙΑΣ DIAFORIKES EXISOSEISdimitirs boufasNo ratings yet
- Unit4-MaximumPrinciple ImportantDocument18 pagesUnit4-MaximumPrinciple ImportantFathi MusaNo ratings yet
- IGCSE H2 07b 04 Quadratic FormulaDocument1 pageIGCSE H2 07b 04 Quadratic FormulaPratham MinochaNo ratings yet
- NMDocument12 pagesNMShravan KumarNo ratings yet