You might also like
- Evidencia1 5Document10 pagesEvidencia1 5Proyecto MusicNo ratings yet
- Vibracion Libre en Sistema Con Varios Grados de LibertadDocument26 pagesVibracion Libre en Sistema Con Varios Grados de LibertadPiero ManrriqueNo ratings yet
- Tabla Shapiro & Wilks1Document5 pagesTabla Shapiro & Wilks1JilmeNo ratings yet
- سایز شینه هاDocument1 pageسایز شینه هاmas oudNo ratings yet
- 03 Task Performance Blue Pink ARGDocument3 pages03 Task Performance Blue Pink ARGEdrian LaitNo ratings yet
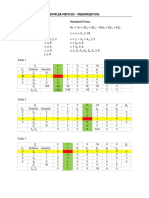
- Maximization Using Simplex MethodDocument7 pagesMaximization Using Simplex MethodROSABELLE CABADINNo ratings yet
- Tra Lan NhamDocument2 pagesTra Lan Nhamthuy doNo ratings yet
- CAN Data Link - Test (M0130596-02) SMCS - 7610Document8 pagesCAN Data Link - Test (M0130596-02) SMCS - 7610Douglas GomesNo ratings yet
- 01Document13 pages01Roshan ShahNo ratings yet
- Problemas Agudo Engranes Analítico FinalDocument43 pagesProblemas Agudo Engranes Analítico FinalYaGNo ratings yet
- Arb Mat AluDocument11 pagesArb Mat AlucapcharryNo ratings yet
- 普物實驗 上學期 4 基本度良與數據處理 結報Document6 pages普物實驗 上學期 4 基本度良與數據處理 結報林蔚薰No ratings yet
- NEWTON RAPSHON 1ER ORDENDocument1 pageNEWTON RAPSHON 1ER ORDENLord JonNo ratings yet
- Taller 1Document2 pagesTaller 1dianacarolinarodriguez2024No ratings yet
- Abaco Cal.Document52 pagesAbaco Cal.Miler VallejosNo ratings yet
- Unidades de PresionDocument2 pagesUnidades de PresionEguia IngNo ratings yet
- Math 3ap19 1trim5 PDFDocument1 pageMath 3ap19 1trim5 PDFYaya YayaNo ratings yet
- Dimensions of Bulb Flats in Accordance With EN 10067Document2 pagesDimensions of Bulb Flats in Accordance With EN 10067Mikhail Roy Dela CruzNo ratings yet
- Je Compte Jusqu À 9999 CM1 Exercices Série 001Document4 pagesJe Compte Jusqu À 9999 CM1 Exercices Série 001ritteneulaula-5185No ratings yet
- Tablas QCDocument15 pagesTablas QCYosse Stefanya Peña VeraNo ratings yet
- CalculpvcDocument7 pagesCalculpvcchorfi khemissiNo ratings yet
- Multi Exos 01Document1 pageMulti Exos 01Nadir GhezalaNo ratings yet
- Reporte 2Document4 pagesReporte 2Kyara CoronadoNo ratings yet
- N4 1Document7 pagesN4 1Amarbayar BayaraaNo ratings yet
- RM-PROGRESIONES Y SERIES-minDocument32 pagesRM-PROGRESIONES Y SERIES-minJack FloresNo ratings yet
- Zantei PDFDocument30 pagesZantei PDFeddve23No ratings yet
- DocumentDocument2 pagesDocumentali braNo ratings yet
- WLTHKDocument1 pageWLTHKAli Osman ÖzverenNo ratings yet
- Benceno - ToluenoDocument9 pagesBenceno - ToluenoCASTELO CORTEZ KENYI ISSACNo ratings yet
- 小数的乘法Document20 pages小数的乘法stephanie chongNo ratings yet
- Taller Notacion Cientifica Fisica Grado 8 2020Document1 pageTaller Notacion Cientifica Fisica Grado 8 2020oscar parraNo ratings yet
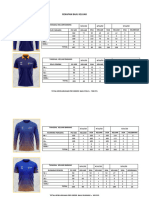
- Rekapan Baju Keluar Pak Jawal HKNDocument3 pagesRekapan Baju Keluar Pak Jawal HKNOKI PRATAMA CHANDRA SAPUTRANo ratings yet
- Five Night FreddyDocument2 pagesFive Night Freddycorbalanandres300No ratings yet
- TFG Laura Caballero RuizDocument151 pagesTFG Laura Caballero RuizFernando FuentealbaNo ratings yet
- Lab 1.6 ExpDocument43 pagesLab 1.6 ExpSamuel SantosNo ratings yet
- 三年级 币值的除法Document4 pages三年级 币值的除法Yen LyuNo ratings yet
- Paket Passanger & Pick Up SuzukiDocument1 pagePaket Passanger & Pick Up Suzukimuhamad ilhamNo ratings yet
- แคลคูลลัสเบื้องต้นDocument65 pagesแคลคูลลัสเบื้องต้นณาตยา ผสมวงศ์No ratings yet
- تحليل الارتباط الخطى المستقيم PDFDocument3 pagesتحليل الارتباط الخطى المستقيم PDFOsama HamedNo ratings yet
- 11-12.1.2024 Mat Tahun 4Document19 pages11-12.1.2024 Mat Tahun 4g-22216914No ratings yet
- Peso Planchas PTFEVirgenDocument1 pagePeso Planchas PTFEVirgenAWESANo ratings yet
- Sumas y Restas Con Unidades y DecenasDocument3 pagesSumas y Restas Con Unidades y DecenasApoyo PedagógicoNo ratings yet
- Math Final Rev.Document10 pagesMath Final Rev.Osama AdelNo ratings yet
- PRACTICADocument11 pagesPRACTICAMauricio Carlos Ramirez PayéNo ratings yet
- Recomposition de Nombres Ce1Document2 pagesRecomposition de Nombres Ce1Fifi liloNo ratings yet
- Steel SpecificationDocument11 pagesSteel SpecificationKing KazmaNo ratings yet
- AngkaDocument4 pagesAngkaBabySharkNo ratings yet
- La Multiplication Fiche Entrainement 4Document2 pagesLa Multiplication Fiche Entrainement 4rodep36591No ratings yet
- AYUSH BHardwaj 1243, StatsDocument11 pagesAYUSH BHardwaj 1243, Statsrangamkumar99No ratings yet
- 14장 동역학 과제Document3 pages14장 동역학 과제나니누No ratings yet
- محاضرة 15Document16 pagesمحاضرة 15george bensonNo ratings yet
- Block IndustryDocument20 pagesBlock IndustryGbemisola FasuyiNo ratings yet
- Matriz de Rigidez en Coordenadas Locales y GlobalesDocument3 pagesMatriz de Rigidez en Coordenadas Locales y GlobalesJ RestrepoNo ratings yet
- Math Revision Sheet First TermDocument16 pagesMath Revision Sheet First TermMohamed AhmedNo ratings yet
- Gabarito DefinitivoDocument5 pagesGabarito Definitivowillnunes421No ratings yet
- 二年级 数学比赛Document2 pages二年级 数学比赛sjkckepong muarNo ratings yet
- Butt Welding Concentric and Eccentric Reducers - From 1-2"to 48"Document4 pagesButt Welding Concentric and Eccentric Reducers - From 1-2"to 48"rock starNo ratings yet
- 補底工作紙1 (重印兼訂正)(教師版)Document3 pages補底工作紙1 (重印兼訂正)(教師版)Vic TNo ratings yet
- New Caballero (5) - 1Document38 pagesNew Caballero (5) - 1Jorge CinquettiNo ratings yet
- Evidencia1 3Document7 pagesEvidencia1 3Proyecto MusicNo ratings yet
- Patente AerogeneradorDocument20 pagesPatente AerogeneradorProyecto MusicNo ratings yet
- Patente EolicoDocument10 pagesPatente EolicoProyecto MusicNo ratings yet
- EolicaDocument18 pagesEolicaProyecto MusicNo ratings yet