You might also like
- IO64 and IO1000 Technical Reference ManualDocument320 pagesIO64 and IO1000 Technical Reference ManualCristián Ceballos Rucán50% (4)
- 737 Performance Reference Handbook - EASA EditionFrom Everand737 Performance Reference Handbook - EASA EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideFrom EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideRating: 4 out of 5 stars4/5 (8)
- Koomey S&s ManualDocument0 pagesKoomey S&s Manualborregocr90% (10)
- Century 41 Autopilot ManualDocument61 pagesCentury 41 Autopilot ManualjackcastelNo ratings yet
- B767 Autopilot Flight Director System Training ManualDocument155 pagesB767 Autopilot Flight Director System Training ManualElijah Paul Merto100% (4)
- Control System For Controllable Pitch Marine Propellers: Operation ManualDocument36 pagesControl System For Controllable Pitch Marine Propellers: Operation ManualGonzalez JeanNo ratings yet
- 757 PW2 CH 76 2004 SingleDocument11 pages757 PW2 CH 76 2004 SingleDiego Ruddy Arcaine ZegarrundoNo ratings yet
- Airmanship:-: Exercise 4 - Effects of ControlsDocument10 pagesAirmanship:-: Exercise 4 - Effects of ControlsskywalkerlinkNo ratings yet
- Opsmans608 FlightcontrolsDocument22 pagesOpsmans608 FlightcontrolsTyler BröggerNo ratings yet
- 08 Accumulator, TravelDocument151 pages08 Accumulator, TravelWu Sono100% (1)
- CH-9 Flight ControlDocument72 pagesCH-9 Flight ControlAnwar Hossain KhanNo ratings yet
- 5510 0096 At2000 Pcs Product InformationDocument32 pages5510 0096 At2000 Pcs Product InformationDima ZayatsNo ratings yet
- B767 ATA 27 Student BookDocument151 pagesB767 ATA 27 Student BookElijah Paul Merto100% (8)
- Design and Optimization of Control System For Controllable Pitch Propeller With Load ProtectionDocument6 pagesDesign and Optimization of Control System For Controllable Pitch Propeller With Load Protectionjulianasange8No ratings yet
- Mettler Bernard 2000 1Document25 pagesMettler Bernard 2000 1sanjesh100% (1)
- 816D Propel System & Operating Hydraulic System Operation PrincipleDocument28 pages816D Propel System & Operating Hydraulic System Operation PrincipledshudrikNo ratings yet
- Koomey S S ManualDocument95 pagesKoomey S S Manualasatyamanoj100% (2)
- M20C ManualDocument46 pagesM20C ManualfasilpereiraNo ratings yet
- Engine Room Simulator ERS 4000: Vessel Model "Tanker LNG" Trainee ManualDocument276 pagesEngine Room Simulator ERS 4000: Vessel Model "Tanker LNG" Trainee Manualschjhdfi38No ratings yet
- Man Control PropulsionDocument32 pagesMan Control PropulsionNippur de Lagash100% (2)
- Coursemaster 880man0bDocument48 pagesCoursemaster 880man0bAkhil ViswanathanNo ratings yet
- 13.11 - Air ConditioningDocument40 pages13.11 - Air ConditioningTheo kl100% (2)
- Welcome TO Government Polytechnic AmravatiDocument28 pagesWelcome TO Government Polytechnic AmravatiGauravYadavNo ratings yet
- EC 135 Flight Control Training ManualDocument74 pagesEC 135 Flight Control Training Manualpilot digitalNo ratings yet
- Carb Owners ManualDocument26 pagesCarb Owners ManualTroy Bauer100% (14)
- CM650MAN Series2 3rdDocument59 pagesCM650MAN Series2 3rdRestoux LudovicNo ratings yet
- 212 PTM12 HydraulicsDocument20 pages212 PTM12 HydraulicsBechir FoudhailiNo ratings yet
- BB831 Xa05xen E1 PDFDocument50 pagesBB831 Xa05xen E1 PDFDaniel RamirezNo ratings yet
- Chapter 49 Part 1Document11 pagesChapter 49 Part 1Frank JansenNo ratings yet
- Manual de Servicio Grúa Grove RT530Document366 pagesManual de Servicio Grúa Grove RT530Cesar Antonio AntillancaNo ratings yet
- BH60M BH50M Service Manual - 03-01-2012Document500 pagesBH60M BH50M Service Manual - 03-01-2012Bontor TuaNo ratings yet
- Accel500 Speedlooptuning SWDocument15 pagesAccel500 Speedlooptuning SWAsz TechNo ratings yet
- Woodward ActuatorDocument40 pagesWoodward Actuatorgabriel100% (2)
- Engine Room Simulator ERS 4000: Vessel Model "Tanker LNG" Trainee ManualDocument276 pagesEngine Room Simulator ERS 4000: Vessel Model "Tanker LNG" Trainee Manualricardote24No ratings yet
- McDonnell Douglas DC 10 40 Flight ControlsDocument19 pagesMcDonnell Douglas DC 10 40 Flight ControlsAndrewNo ratings yet
- Governors Apparatus ExplainedDocument14 pagesGovernors Apparatus ExplainedHimanshu Kulshrestha100% (1)
- Q400 Propeller PDFDocument10 pagesQ400 Propeller PDFGirish SreeneebusNo ratings yet
- CM800 System Manual: Coursemaster AutopilotsDocument63 pagesCM800 System Manual: Coursemaster AutopilotsViliame D RoqicaNo ratings yet
- Oil Country WF Model 57802-100TK Hydraulic Tubing TongDocument83 pagesOil Country WF Model 57802-100TK Hydraulic Tubing Tongwuillian barreto100% (1)
- Training Manual PA-31 NavajoDocument106 pagesTraining Manual PA-31 NavajoAMINENo ratings yet
- KS-PR-DeG-0119 Compressor Design Guide Rev.1ADocument50 pagesKS-PR-DeG-0119 Compressor Design Guide Rev.1APatriciafm18No ratings yet
- 757 PW2 CH 75 2004 SingleDocument23 pages757 PW2 CH 75 2004 SingleDiego Ruddy Arcaine ZegarrundoNo ratings yet
- 07 Tur Gov - STDDocument62 pages07 Tur Gov - STDgautamntpc100% (2)
- Oil Country - Llave Hidraulica 57853-100 (OSM-166 57853-100)Document75 pagesOil Country - Llave Hidraulica 57853-100 (OSM-166 57853-100)jhogs74100% (3)
- Operation Manual 3A - HIE-1708-OM3ADocument72 pagesOperation Manual 3A - HIE-1708-OM3AJuan Andrés Rojas HeinzNo ratings yet
- ServiceDocument398 pagesServicemaher mlbaseNo ratings yet
- Schroedahl ArvDocument19 pagesSchroedahl ArvfadzilharmanNo ratings yet
- Manual de Motores Curso Treing 2015Document79 pagesManual de Motores Curso Treing 2015francisco saez moraNo ratings yet
- 757 PW2 CH 80 2004 SingleDocument8 pages757 PW2 CH 80 2004 SingleDiego Ruddy Arcaine ZegarrundoNo ratings yet
- Unit 2: Load Sensing, Pressure Compensated Hydraulic SystemsDocument19 pagesUnit 2: Load Sensing, Pressure Compensated Hydraulic SystemsMohammed KhalidNo ratings yet
- 08 TR Shoot-Hyd SysDocument92 pages08 TR Shoot-Hyd SysAnonymous ByaV1f100% (2)
- Propeller AerodynamicsDocument6 pagesPropeller AerodynamicsMuhammedNayeemNo ratings yet
- Auxiliary Propeller SystemDocument3 pagesAuxiliary Propeller SystemShakir FadzliNo ratings yet
- BB834 Ba01xen E2 PDFDocument71 pagesBB834 Ba01xen E2 PDFEbrahim Abd El HadyNo ratings yet
- Synchrophaser Vs SynchronisingDocument5 pagesSynchrophaser Vs SynchronisingAnish Kumar SinghNo ratings yet
- APC715 V1.1 enDocument68 pagesAPC715 V1.1 enincore1976No ratings yet
- Tactical Missile Guidance and Control: NotesDocument10 pagesTactical Missile Guidance and Control: NoteschtNo ratings yet
- DC-8 - Pneumatic SystemDocument18 pagesDC-8 - Pneumatic SystemGino AcevedoNo ratings yet
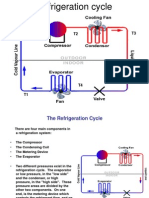
- RAC CycleDocument10 pagesRAC CyclekavooriNo ratings yet
- Jest EV Brochure ENDocument36 pagesJest EV Brochure ENPatricia Lizeth Cossio ZuritaNo ratings yet
- Product Overview - Phoenix ContactDocument19 pagesProduct Overview - Phoenix ContactMANISH KUMARNo ratings yet
- 2 Cable SlabDocument16 pages2 Cable Slabex.project77No ratings yet
- Sauter Face Mounted VDI 50 - DIN 5480 - Left - WTO - enDocument25 pagesSauter Face Mounted VDI 50 - DIN 5480 - Left - WTO - enkorray1No ratings yet
- Machine Design - Lecture 7P - Shaft Design - Seatwork ProblemsDocument11 pagesMachine Design - Lecture 7P - Shaft Design - Seatwork ProblemsBenjamin MabuteNo ratings yet
- Bus Differential System: Grid SolutionsDocument762 pagesBus Differential System: Grid SolutionsgabrielrezvNo ratings yet
- Shop-4-Cross Peen Hammer HeadDocument8 pagesShop-4-Cross Peen Hammer HeadJag MasterNo ratings yet
- Sick Dfs60b S1ab02500 DatasheetDocument6 pagesSick Dfs60b S1ab02500 DatasheethaithamNo ratings yet
- Escavadora Giratória 130Document36 pagesEscavadora Giratória 130AbilioNo ratings yet
- Fixed Plant Report: Conveyor Belts: By: Brian T. NcubeDocument29 pagesFixed Plant Report: Conveyor Belts: By: Brian T. NcubeBrian NcubeNo ratings yet
- 372-772 - Kwik Kleen Owners ManualDocument34 pages372-772 - Kwik Kleen Owners ManualPaulo Antonio Mora RojasNo ratings yet
- Numerical Control of Machine Tool (De) ME453 Unit 2Document96 pagesNumerical Control of Machine Tool (De) ME453 Unit 2mohd mansoorNo ratings yet
- HHF-1600HL Drilling Pump Parts ListDocument27 pagesHHF-1600HL Drilling Pump Parts ListDaniel RinconNo ratings yet
- Landscape 2014Document78 pagesLandscape 2014adionicelNo ratings yet
- Tts - Heavy Lift Cranes DK II Heavy - 2014Document2 pagesTts - Heavy Lift Cranes DK II Heavy - 2014Ruben Bartolome GarciaNo ratings yet
- Design of a Retractable Electric Propulsion System for SailplanesDocument112 pagesDesign of a Retractable Electric Propulsion System for SailplanesBalashiv KumaranNo ratings yet
- DBxe Pump IOM ManualDocument36 pagesDBxe Pump IOM ManualSaurabh GautamNo ratings yet
- American Audio VMS2Document26 pagesAmerican Audio VMS2namr1No ratings yet
- EditedDocument25 pagesEditedVISWA RAVINo ratings yet
- Pioneer VSX-D912 ReceiverDocument80 pagesPioneer VSX-D912 ReceiverTom100% (3)
- Jiangmen Wanneng Lock Inc Product CatalogDocument13 pagesJiangmen Wanneng Lock Inc Product CatalogSimone G. GoularteNo ratings yet
- Chevrolet N300P Parts CatalogueDocument2 pagesChevrolet N300P Parts Cataloguecifer.xiongNo ratings yet
- Chapati Making: Manufacturer of A LeadingDocument8 pagesChapati Making: Manufacturer of A LeadingWaqar KhanNo ratings yet
- Automatic MotorBike Stand Slider 2020Document16 pagesAutomatic MotorBike Stand Slider 2020abhishek100% (2)
- Electric Motor and GeneratorDocument6 pagesElectric Motor and GeneratorJesell JeanNo ratings yet
- Drawing Fitting and FlangeDocument8 pagesDrawing Fitting and FlangeNyoman RakaNo ratings yet
- Electrical Instrument PDFDocument6 pagesElectrical Instrument PDFLonghuynh LêNo ratings yet
- Earth Fault Protection Guide 2022 Part 1Document10 pagesEarth Fault Protection Guide 2022 Part 1tomato100% (1)